全自动拆包机的制作方法
本发明涉及自动化设备,尤其涉及一种全自动拆包机。
背景技术:
1、吨袋是一种柔性运输包装容器,一般多用聚丙烯、聚乙烯等聚酯纤维纺织而成,具有结构简单、自重轻、可折叠、回收所占空间小、价格低廉等特点。吨袋已广泛应用于化工、建材、塑料矿产品等各类粉状、粒状、块状物品的包装运输,配以起重机或叉车,就可以实现集装单元化运输。
2、目前,吨袋物料在使用时多采用人工挂袋方式进行人工辅助卸料,其操作繁琐且不安全。必须对其包装袋进行开拆并将包装袋内的产品倒出,拆开时的一些粉尘及细小的杂质对人体有害,其次,吨袋在运输过程中其表面也会附着污染物,在拆包过程中存在污染物料的风险。
技术实现思路
1、本发明的主要目的是提供一种全自动拆包机,旨在解决吨袋拆包过程中容易产生对人体有害的粉尘及细小的杂质,且存在污染物料风险的问题。
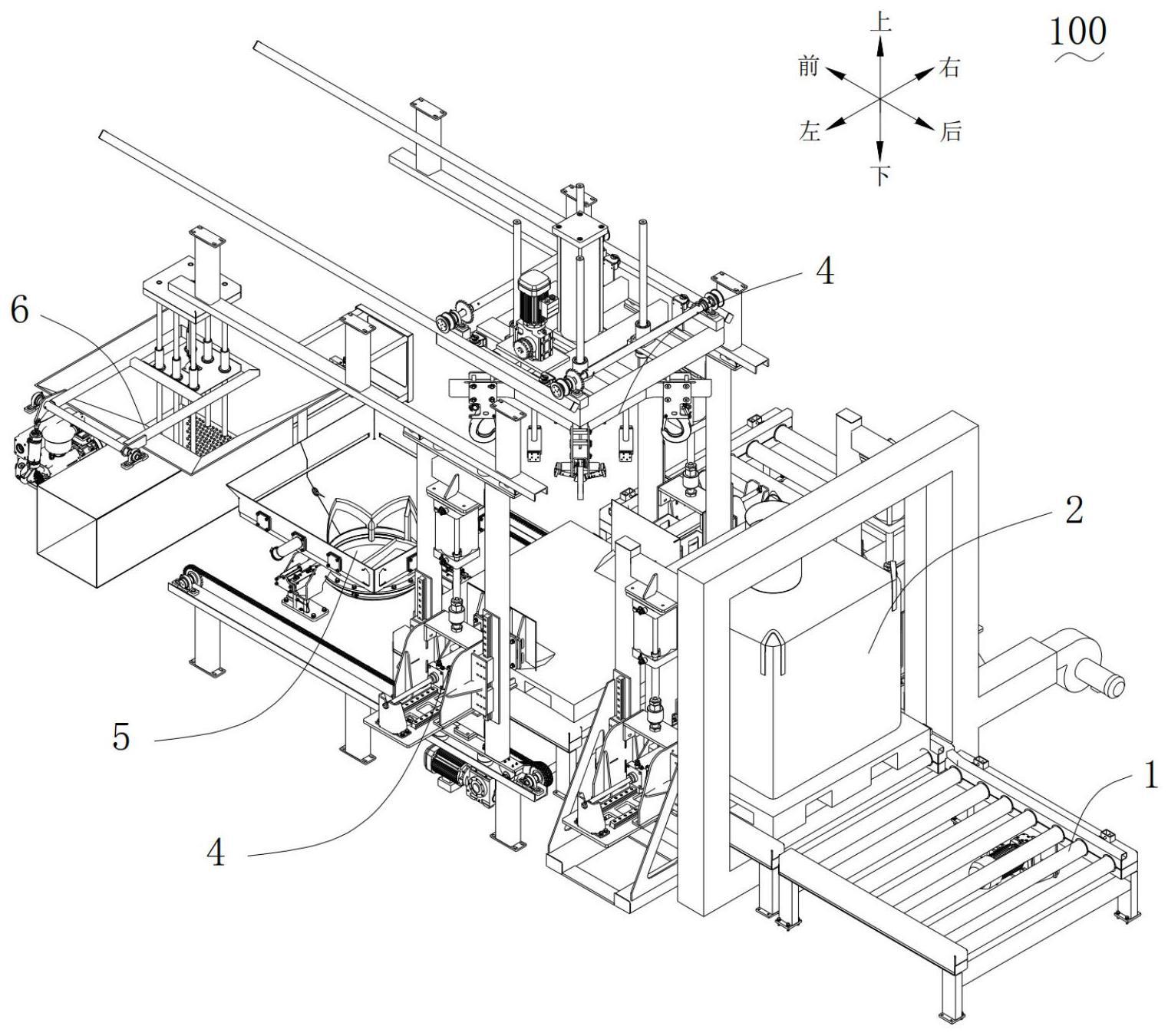
2、为实现上述目的,本发明提出一种全自动拆包机,所述全自动拆包机包括输送装置、移载抱夹装置、吨袋抓取装置和破袋装置。所述输送装置用于输送吨袋;所述移载抱夹装置包括下框架、第一驱动机构和两个抱夹滑台,所述下框架形成搬运通道,且所述搬运通道具有第一工位和第二工位,两个所述抱夹滑台相对设置且位于所述搬运通道的两侧,所述第一工位与所述输送装置对接,所述第一驱动机构用于驱动两个所述移载抱夹装置搬运位于所述第一工位的吨袋至第二工位;所述吨袋抓取装置包括轨道机构、第二驱动机构和抓取机构,所述第二驱动机构可移动设置在所述轨道机构上;所述破袋装置包括卸料斗和破袋刀具,所述卸料斗具有卸料仓和与所述卸料仓连通且相对设置的入料口和出料口;所述破袋刀具设置于所述卸料仓内,所述破袋刀具的刀刃朝上设置;所述第二驱动机构用于驱动所述抓取机构抓取位于所述第二工位的吨袋移动至所述入料口上方,所述抓取机构还用于移动吨袋下落至与破袋刀具接触。
3、可选地,所述全自动拆包机还包括风淋装置,所述风淋装置架设于所述输送装置的上方,所述风淋装置用于清洁所述吨袋表面污染物。
4、可选地,所述下框架包括两个沿第一方向间隔设置的两个第一导向梁,两个所述第一导向梁之间形成所述搬运通道;所述第一工位和所述第二工位沿第二方向间隔设置;所述抱夹滑台包括支撑框、第一驱动组件、第二驱动组件和抱夹夹具,所述支撑框与对应的所述第一导向梁滑动连接;所述第一驱动组件与所述支撑框连接,所述第一驱动组件的输出端与所述第二驱动组件连接;所述第二驱动组件的输出端与所述抱夹夹具连接;所述第一驱动组件用于驱动所述第二驱动组件和所述抱夹夹具沿竖直方向移动,所述第二驱动组件用于驱动所述抱夹夹具沿第一方向移动;所述第一驱动机构与两个所述支撑框传动连接,所述第一驱动机构用于驱动两个支撑框沿第二方向同步移动。
5、可选地,所述抱夹夹具包括基座和至少两个夹持杆,至少两个夹持杆在所述基座上沿高度方向间隔设置,各所述夹持杆具有向第一方向内凹的弯折段,各所述夹持杆背离所述基座的一侧形成夹持面,且位于下侧的所述夹持杆的夹持面凸出于位于上侧的所述夹持杆的夹持面。
6、可选地,所述抓取机构包括支架、抖袋组件和抓取组件,所述支架设置在所述驱动机构上,所述第二驱动机构用于驱动所述支架沿第一方向移动,所述第一方向与所述轨道机构的延伸方向平行;所述抖袋组件设置在所述支架上;所述抓取组件可升降设置在所述抖袋组件上;所述第二驱动机构驱动所述支架移动至上料工位,所述抓取组件下降以抓取吨袋,所述抓取组件上升以提起所述吨袋;或,所述第二驱动机构驱动所述支架移动至下料工位,所述抓取组件下降以释放所述吨袋。
7、可选地,所述抖袋机构包括连接套、连接杆和缓冲件,所述连接套设置在所述支架上;所述连接杆设置在所述连接套中,所述连接杆的底部延伸出所述连接套并所述抓取机构连接;所述缓冲件设置在所述连接套内,所述缓冲件的一端与所述连接套的内壁连接,另一端与所述连接杆连接。
8、可选地,所述卸料仓包括自所述入料口至所述出料口依次设置的除尘段和落料段,所述落料段沿靠近所述出料口的方向呈渐缩设置;所述除尘段的侧壁开设有除尘口,所述除尘口用于与外部气源连通以在所述除尘口处形成负压。
9、可选地,所述破袋装置还包括多个固定组件,多个所述固定组件沿所述卸料斗的外周间隔设置,各所述固定组件包括插针驱动件和插针,所述插针可滑动地穿过所述卸料口的侧壁,所述插针驱动件的输出端与所述插针连接,所述插针驱动件用于驱动所述插针伸入所述卸料仓和缩回。
10、可选地,所述破袋刀具包括刀座和刀具本体;所述刀具本体与所述刀座连接,所述刀具本体的一侧具有缺口;所述刀具本体具有至少三个沿远离所述刀座的方向凸出的刃顶部,所述刀具的两端以及任意两个刃顶部之间具有沿靠近所述刀座的方向内凹的刃底部,所述刃底部与相邻的所述刃顶部之间具有连续的刀刃。
11、可选地,所述全自动拆包机还包括挤袋装置,所述挤袋装置包括回收框、摆动组件、第一伸缩组件和第二伸缩组件,所述回收框包括壳体,所述壳体包括腔体,所述腔体形成有第一开口和第二开口,所述第一伸缩组件沿水平方向伸缩设置,所述摆动组件安装于所述壳体,所述第二伸缩组件安装于所述摆动组件,所述摆动组件能够驱动所述第二伸缩组件朝向所述第二开口运动,所述第二伸缩组件的伸出轴能够伸入或缩出所述腔体,所述第一伸缩组件的伸出轴能够朝向所述第一开口移动以伸入或缩出所述腔体。
12、可选地,所述第一伸缩组件包括相互连接一级伸缩部件和二级伸缩部件,所述一级伸缩部件和所述二级伸缩部件均沿水平方向伸缩设置于所述第一开口,所述一级伸缩部件的伸出轴能够朝向所述第一开口移动以伸入或缩出所述腔体;所述二级伸缩部件能够伸出,以驱动所述一级伸缩部件朝向所述第三开口伸出或缩回所述腔体。
13、本发明技术方案中,输送装置与外部设备对接,用于向后端装置输送吨袋物料,吨袋被移动至第一工位,此时,两个抱夹装置相互靠近以夹持吨袋,并能够提升吨袋脱离第一工位,第一驱动机构移动抱夹装置及吨袋至第二工位上方,两个抱夹装置将吨袋放置在第二工位;抓取机构抓取位于第二工位的吨袋,第二驱动机构在轨道上移动带动抓取机构和吨袋移动至入料口上方,抓取机构带动吨袋下落,使破袋刀具戳破吨袋底部,形成开口,吨袋内的物料从底部的开口流入卸料仓,并从出料口送出,由此完成一次破袋卸料循环。整个破袋卸料过程中,无需人工辅助,工作环境不会对工作人员的健康造成风险。并且在进行破袋前。
技术特征:
1.一种全自动拆包机,其特征在于,所述全自动拆包机包括:
2.如权利要求1所述的全自动拆包机,其特征在于,所述全自动拆包机还包括风淋装置,所述风淋装置架设于所述输送装置的上方,所述风淋装置用于清洁所述吨袋表面污染物。
3.如权利要求1所述的全自动拆包机,其特征在于,所述下框架包括两个沿第一方向间隔设置的两个第一导向梁,两个所述第一导向梁之间形成所述搬运通道;所述第一工位和所述第二工位沿第二方向间隔设置;
4.如权利要求3所述的全自动拆包机,其特征在于,所述抱夹夹具包括:
5.如权利要求1所述的全自动拆包机,其特征在于,所述抓取机构包括:
6.如权利要求5所述的全自动拆包机,其特征在于,所述抖袋机构包括:
7.如权利要求1所述的全自动拆包机,其特征在于,所述卸料仓包括自所述入料口至所述出料口依次设置的除尘段和落料段,所述落料段沿靠近所述出料口的方向呈渐缩设置;所述除尘段的侧壁开设有除尘口,所述除尘口用于与外部气源连通以在所述除尘口处形成负压;和/或,
8.如权利要求1所述的全自动拆包机,其特征在于,所述破袋刀具包括:
9.如权利要求1至8中任一项所述的全自动拆包机,其特征在于,所述全自动拆包机还包括挤袋装置,所述挤袋装置包括回收框、摆动组件、第一伸缩组件和第二伸缩组件,所述回收框包括壳体,所述壳体包括腔体,所述腔体形成有第一开口和第二开口,所述第一伸缩组件沿水平方向伸缩设置,所述摆动组件安装于所述壳体,所述第二伸缩组件安装于所述摆动组件,所述摆动组件能够驱动所述第二伸缩组件朝向所述第二开口运动,所述第二伸缩组件的伸出轴能够伸入或缩出所述腔体,所述第一伸缩组件的伸出轴能够朝向所述第一开口移动以伸入或缩出所述腔体。
10.如权利要求9所述的全自动拆包机,其特征在于,所述第一伸缩组件包括相互连接一级伸缩部件和二级伸缩部件,所述一级伸缩部件和所述二级伸缩部件均沿水平方向伸缩设置于所述第一开口,所述一级伸缩部件的伸出轴能够朝向所述第一开口移动以伸入或缩出所述腔体;
技术总结
本发明公开一种全自动拆包机,其包括输送装置、移载抱夹装置、吨袋抓取装置和破袋装置;输送装置与外部设备对接,用于向后端装置输送吨袋物料,吨袋被移动至第一工位时,两个抱夹装置相互靠近以夹持第一工位的吨袋放置在第二工位;抓取机构抓取位于第二工位的吨袋移动至入料口上方,抓取机构带动吨袋下落,使破袋刀具戳破吨袋底部形成开口,吨袋内的物料从开口处流入卸料仓,并从出料口送出,由此完成一次破袋卸料循环。整个破袋卸料过程中,无需人工辅助,不会对工作人员的健康造成风险。
技术研发人员:余子毅,阳业,杨逊源,王佳文,陈迎婵
受保护的技术使用者:湖南宏工智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!