一种半导体堆垛机的机械臂及存取方法与流程
本技术涉及半导体存储立库,具体涉及一种半导体堆垛机的机械臂及存取方法。
背景技术:
1、在半导体厂fab(fabrication)内,晶圆盒的数量是极为庞大的,晶圆盒的存储和搬运是一个非常重要的环节,晶圆盒存储立库设备正是解决这样问题的关键设备,而设备内部高速度、高精度运行的堆垛机装置正是晶圆盒存储立库设备的核心。
2、但堆垛机受限于立库设备(立库巷道、阁位等为堆垛机存取晶圆盒预留的可操作空间非常有限),对传感器检测精度、rfid传感器读取的速度和储存数量的要求,在传感器布局方面有下述要求:1、机械臂货叉相对于库的阁位在晶圆盒存取过程中需具备多方面准确检测的功能,如货叉上晶圆盒有无状态检测、阁位上晶圆盒有无状态检测、货叉相对于阁位的位置检测等,且要求检测的准确性要高;2、rfid读取速度晶圆盒信息的速度要快;3、设备自重尽可能减小,提高运行速度;
3、因此现有的堆垛机装置或多或少会存在下述方面的问题:
4、1)、因货叉传感器布局位置设定问题,存在传感器误检测的情况,很可能导致设备运动时损坏晶圆盒;传感器的扫描范围由于受限于安装孔位对光线的阻挡以及晶圆盒底部对光线的阻挡等因而是一定的,对传感器的检测范围、检测位置要求较高,调试难度大,从而容易造成误检测的问题。
5、可以参阅图1,在先技术中堆垛机的机械手的存取盘001无论向存储库阁位存入晶圆盒002还是取出晶圆盒002时,都仅使用传感器003进行位置检测,即使用传感器003向阁位004上的反光板005发出检测光线006,当无光线返回时判断,判断当前阁位004上有晶圆盒002;当有光线返回时,判断当前阁位004上没有晶圆盒002。
6、图2-图5展示了存储盘上仅使用传感器003检测阁位004盘面上晶圆盒状态时,末端光线与反光板的相对位置。如图3、4所示,光线可能打在反光板的上侧边或下侧边,或超出上侧边或下侧边,从而造成误检,造成后续的错误执行;只有如图5所示的光线较准确的打在反光板的有效板面范围内时,才会有准确的检测结果;
7、但受限于存储库内部空间非常有限及保证高精准度,反光板005尺寸有限,且反光板005的安装误差加上示教误差加上机械手臂停止位置误差三重叠加时,传感器003的检测光线可能偏离反光片005的范围,造成无光线返回,从而误判当前阁位004上晶圆盒的状态;检测误差问题相对棘手,为了减小误差,人工在安装反光板、示教调试堆垛机运行等方面面临巨大压力。
8、2)、另外现有的rfid(radio frequency identification,射频识别)读取传感器通常设定在某一个存储位上,需要堆垛机将晶圆盒放到储位上读取,严重浪费时间,导致rfid读取速度慢;
9、3)、堆垛机手臂部分自重大,提升运行速度困难。
技术实现思路
1、有鉴于此,本技术提供一种半导体堆垛机的机械臂及存取方法,通过配置不同位置和数量的传感器来提高检测精度和检测速度,将rfid读取器直接设置在存取盘上,用以解决传感器误检测从而可能导致的设备运动时损坏晶圆盒、以及rfid读取速度慢等技术问题。
2、本说明书实施例提供以下技术方案:
3、本说明书实施例提供一种半导体堆垛机的机械臂,机械臂安装在提升箱上,用于对立库阁位进行晶圆盒的存入/取走;所述机械臂包括用于承载所述晶圆盒的存取盘,所述存取盘上安装有用于直接可读取对应晶圆盒信息的rfid读取器以及多个检测传感器;
4、多个检测传感器至少包括安装在所述存取盘一侧端的第一传感器以及设置在所述存取盘前端的第二传感器;所述第一传感器被配置为在所述存取盘执行从所述立库阁位上取走晶圆盒,所述存取盘位于等待取货指定位置时,独立检测所述立库阁位是否有对应的晶圆盒;所述第二传感器被配置为在所述存取盘执行向所述立库阁位上存入晶圆盒,所述存取盘位于等待存货指定位置时,独立检测所述立库阁位是否无晶圆盒。
5、在一些实施例中,所述检测传感器还包括设置在所述存取盘后端上方的第三传感器;所述第三传感器被配置为在所述存取盘执行从所述立库阁位上取走晶圆盒时,对所述存取盘的盘面进行无晶圆盒检测,在所述存取盘执行向所述立库阁位上存入晶圆盒时,对所述存取盘的盘面进行有晶圆盒检测。
6、在一些实施例中,多个检测传感器还包括设置在所述存取盘另一侧端的第四传感器和第五传感器,所述第四传感器置于所述第五传感器上方,所述第四传感器配置为在所述存取盘执行从所述立库阁位上取走晶圆盒时,检测当前存取盘相对所述立库阁位是否已位于等待取货指定位置;所述第五传感器被配置为在所述存取盘执行向所述立库阁位上存入晶圆盒时,检测当前存取盘相对所述立库阁位是否已位于等待存货指定位置;所述第四传感器和所述第五传感器在竖直方向上的高度差值等于所述等待取货指定位置和存货指定位置的高度差值;所述第一传感器和所述第二传感器在竖直方向上的高度差值等于所述等待取货指定位置和存货指定位置的高度差值。
7、在一些实施例中,多个检测传感器还包括设置在所述存取盘的盘面上的第六传感器,用于检测当前存取盘上的晶圆盒的位置状态。
8、在一些实施例中,所述存取盘的盘面上设置有用于定位所述晶圆盒的定位装置,所述定位装置为与所述晶圆盒配合的定位凸缘。
9、在一些实施例中,所述立库阁位上设置有用于与所述第一传感器和所述第二传感器感应的反光板;所述存取盘上设置有控制箱,所述控制箱上安装有定位所述晶圆盒的防护板,所述第三传感器安装在所述控制箱上,所述存取盘的盘面上设置有与所述第三传感器对应的倾斜反光片;
10、所述第六传感器为微动开关,所述第四传感器和所述第五传感器为反射激光传感器,所述第一传感器、第二传感器和所述第三传感器为反射光电传感器。
11、在一些实施例中,所述存取盘配置有减重腔,所述减重腔设置在所述存取盘底部空间位置。
12、本说明书实施例还提供一种存取方法,基于本说明书中任一项实施例所述的半导体堆垛机的机械臂实现,该存取方法包括晶圆盒取走流程和晶圆盒存入流程,通过在存取盘的不同位置设置多个检测传感器进行检测;
13、在所述晶圆盒取走流程中:通过第三传感器对所述存取盘进行晶圆盒的无货检测,通过第四传感器对当前存取盘相对所述立库阁位是否已位于等待取货指定位置进行检测,通过单独设置的第一传感器对所述立库阁位上的晶圆盒进行有货检测;
14、在所述晶圆盒存入流程中:通过第三传感器对所述存取盘进行晶圆盒有货检测、通过第五传感器对当前存取盘相对所述立库阁位是否已位于等待存货指定位置进行检测,通过单独设置的第二传感器对所述立库阁位的晶圆盒进行无货检测;
15、通过设置在所述存取盘前端的rfid读取器,在所述存取盘取走所述立库阁位的晶圆盒时,以及在所述存取盘向所述立库阁位存入晶圆盒时,直接读取对应的晶圆盒信息。
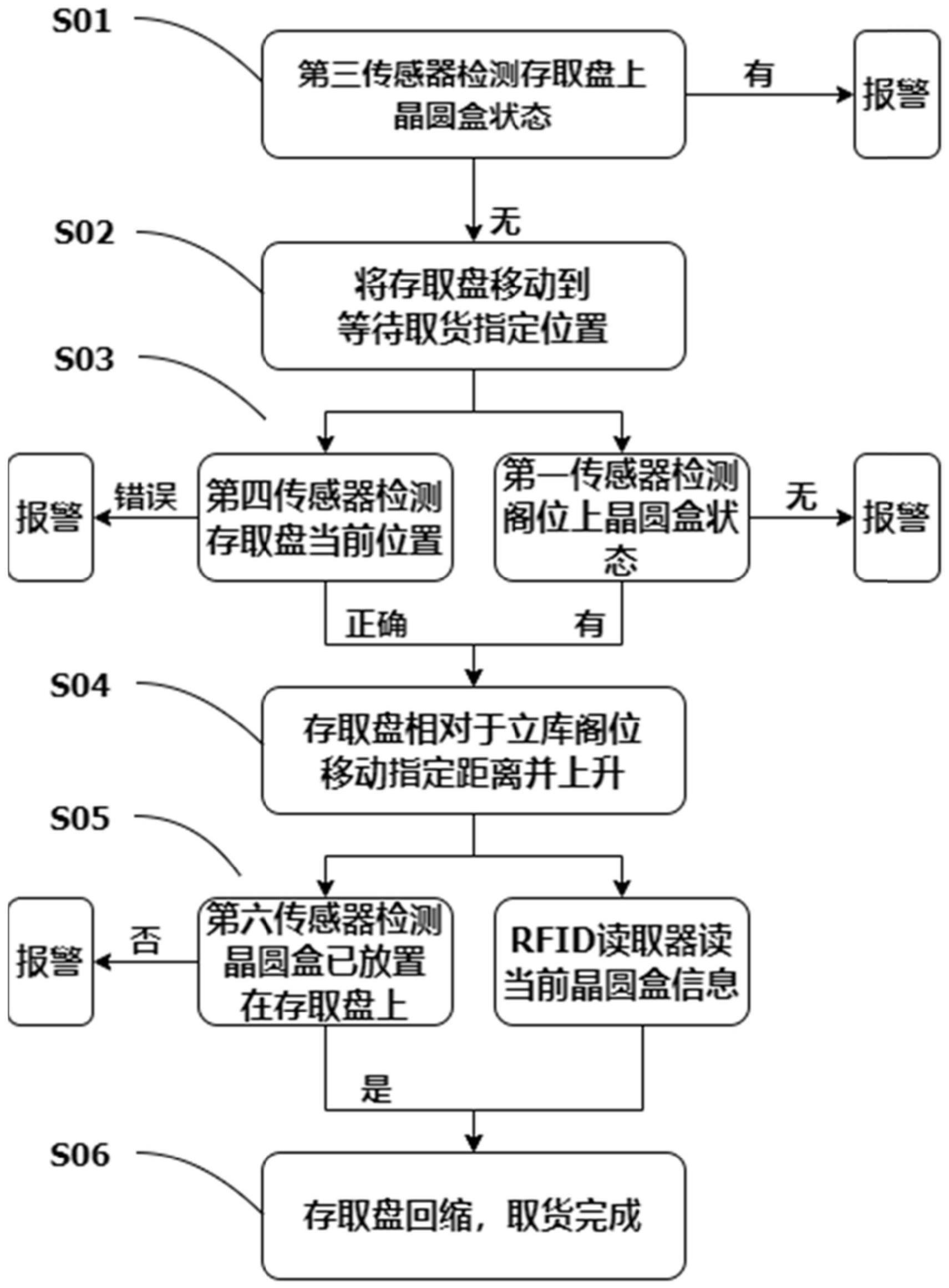
16、在一些实施例中,所述晶圆盒取走流程具体包括如下步骤:
17、步骤s01,第三传感器检测存取盘上晶圆盒状态;经存取盘上的第三传感器对所述存取盘的盘面进行晶圆盒无货检测;若有,则报警;
18、步骤s02,将存取盘移动到等待取货指定位置;将所述存取盘移动到所述立库阁位前方的等待取货指定位置;
19、步骤s03,第四传感器检测存取盘当前位置,第一传感器检测立库阁位上晶圆盒状态;经所述存取盘上的第四传感器检测所述存取盘相对所述立库阁位的等待取货指定位置,若位置错误,则报警;所述存取盘上的第一传感器同步对所述立库阁位上进行晶圆盒有货检测,若无,则报警;
20、步骤s04,存取盘相对于立库阁位移动指定距离并上升;所述存取盘进入所述立库阁位并上升抬取对应的晶圆盒;
21、步骤s05,第六传感器检测晶圆盒已放置在存取盘上,rfid读取器读取当前晶圆盒信息;经所述存取盘上的第六传感器检测当前抬取的晶圆盒是否安装到位,若否,则报警;通过直接设置在所述存取盘上的rfid读取器读取当前晶圆盒的信息;
22、步骤s06,存取盘回缩,取货完成;所述存取盘回缩复位,取货完成。
23、在一些实施例中,所述晶圆盒存入流程具体包括如下步骤:
24、步骤s11,第三传感器检测存取盘上晶圆盒状态,rfid读取器读取当前晶圆盒信息;经存取盘上的第三传感器对所述存取盘的盘面进行晶圆盒有货检测;若无,则报警;所述存取盘上的rfid读取器读取当前晶圆盒的信息;
25、步骤s12,将携晶圆盒的存取盘移动到等待存货指定位置;将携带有对应晶圆盒的所述存取盘移动到所述立库阁位前方的等待存货指定位置;
26、步骤s13,第五传感器检测存取盘当前位置,第二传感器检测立库阁位上晶圆盒状态;经所述存取盘上的第五传感器检测所述存取盘相对所述立库阁位的等待存货指定位置,若位置错误,则报警;所述存取盘上的第二传感器同步对所述立库阁位上进行晶圆盒的无货检测,若有,则报警;
27、步骤s14,存取盘相对于立库阁位移动指定距离并下降;所述存取盘进入所述立库阁位并下降放置对应的晶圆盒;
28、步骤s15,第六传感器检测晶圆盒脱离存取盘;经所述存取盘上的第六传感器检测所述晶圆盒是否已脱离所述存取盘,若否,则报警;
29、步骤s16,存取盘回缩,存货完成;所述存取盘回缩复位,存货完成。在一些实施例中,所述第三传感器为反射光电传感器,设置在所述存取盘后端靠上方位置;所述第六传感器为微动开关;所述第一传感器设置在所述存取盘左侧位置,所述第三传感器设置在所述存取盘前端位置,所述第一传感器和所述第二传感器为反射光电传感器;
30、所述第四传感器和所述第五传感器为反射激光传感器,所述第四传感器和所述第五传感器在竖直方向上的高度差值等于所述等待取货指定位置和存货指定位置的高度差值。
31、与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:
32、采用本技术的机械臂进行晶圆盒存取的方法,通过配置不同位置和数量的传感器来实现精确快速检测,尤其是通过单独设置的第一传感器和第二传感器,单独对立库阁位上的晶圆盒进行检测;通过单独设置的第三传感器,在存入或取出晶圆盒时都能单独地对存取盘上的晶圆盒进行有无料的检测,避免误判的可能性;可以提高检测精度,减少人工装配误差影响,降低机器调试难度;
33、本发明在使用传感器进行检测以保证检测稳定性的基础上,由于又将rfid读取器也设置在存取盘上,实现即取即读的效果;
34、通过对存取盒进行轻量化设计,尽可能地降低自重对运行速度的影响,可以提高设备的性能。
- 还没有人留言评论。精彩留言会获得点赞!