一种船底清舱方法及清舱系统与流程
本发明涉及船底清舱,尤其涉及一种船底清舱方法及清舱系统。
背景技术:
1、螺旋卸船机主要是由喂料头、垂直螺旋输送段和水平螺旋输送段三部分构成的一种高效连续型的散货卸船机。工作时通过反向旋转喂料头将物料挤入垂直输送管底部,然后物料在垂直螺旋叶片的搅动下螺旋上升,到达水平螺旋后被输送至指定物料集中仓内,从而完成输送过程。
2、在输送物料的过程中,海浪可能使船体会发生摇晃。当船舱底部的物料较少,即物料的高度仅剩50公分时,如船体摇晃,螺旋卸船的喂料头可能与船舱底部发生碰撞。
3、现有技术中,为了避免喂料头与船舱底部发生碰撞,当船舱底部的物料较少时,通常在船舱底部放置集料斗和装载车,喂料头插入集料斗;集料斗固定放置于船舱底部;装载车在船舱底部行驶并收集船舱底部的物料,而后再将收集的物料运载至集料斗,装载车将物料从集料斗顶端倒入集料斗内;喂料头将集料斗内的物料输送至指定物料集中仓内。
4、其中,在装载车倾倒物料的过程中,物料会发生飞扬,扬尘会危害工作人员的身体健康,存在较大的安全隐患;喂料头需等待装载车收集物料、往复运输,故物料的运输至集料斗的速度较慢,进而使喂料头的物料输送效率较低。所以非常有必要研发一种船底清舱方法及清舱系统,实现船舱底部物料的连续输送,减少物料飞扬,提高安全性能及物料输送效率。
技术实现思路
1、本发明的目的在于提供一种船底清舱方法及清舱系统,解决现有技术中在船底清舱过程中,物料飞扬、存安全隐患,物料输送效率较低的问题。
2、本发明的目的可以通过以下技术方案实现:
3、一方面,提供了一种船底清舱方法,船舱底部设有清舱机,所述清舱机上设有集料斗;
4、船底清舱方法包括如下步骤:
5、将卸船机的喂料头插入所述集料斗内以吸取所述集料斗内的物料,所述卸船机将所述喂料头吸取的物料输送至船舱外;
6、根据船舱内物料分布情况控制所述喂料头在集料斗内平移运动,所述清舱机在所述船舱底部跟随所述喂料头行走以对所述船舱底部清扫,并将清扫后的物料收集至所述集料斗内。
7、另一方面,提供了一种船底清舱系统,包括清舱机和卸船机,所述清舱机包括行走机构、集料斗、输送机构、清扫机构和用于控制所述清舱机跟随所述卸船机的喂料头行走的随动控制机构,其中:
8、所述集料斗固定在所述行走机构的顶部;
9、所述输送机构安装在所述行走机构上,且其出料端与所述集料斗的内腔相连通;
10、所述清扫机构置于所述行走机构的前方和/或后方,固定在所述输送机构的进料端并与所述输送机构相连通;
11、所述喂料头插入所述集料斗内。
12、作为本发明进一步的方案:所述行走机构为履带式行走机构。
13、作为本发明进一步的方案:所述输送机构为取料螺旋,倾斜设置,其顶端铰接于所述行走机构,并通过固定在所述行走机构上的驱动机构调节其倾斜角度。
14、作为本发明进一步的方案:所述清扫机构包括收集辊,所述收集辊安装在所述输送机构的进料端,且位于所述行走机构的前方和/或后方,所述收集辊上装配有盖板。
15、作为本发明进一步的方案:所述随动控制机构包括控制器和四根伸缩探测杆;
16、所述伸缩探测杆分别置于所述喂料头的前后左右四个方向,其一端通过转接法兰与所述喂料头相连接,其另一端与所述集料斗相连接;
17、每一所述伸缩探测杆上均设有传感器,所述传感器与所述控制器通信连接;所述控制器接收所述传感器的信号以判定所述喂料头运动方向并控制所述行走机构跟随所述喂料头行走。
18、作为本发明进一步的方案:所述伸缩探测杆上设有弹簧,且通过弹簧进行伸缩。
19、作为本发明进一步的方案:所述集料斗的顶部设有防尘罩,所述喂料头穿过防尘罩。
20、作为本发明进一步的方案:所述行走机构的行进速度为0.1m/s~0.3m/s。
21、本发明的有益效果,将喂料头插入清扫机的集料斗中,通过清舱机在船舱底部边行走边收集物料,喂料头不会与船舱底部接触相撞,也无需装载机将物料运载至集料斗,减少物料飞扬,提高安全性能;通过清舱机跟随置于集料斗内的喂料头进行行走,以使集料斗连续地为喂料头输送物料,卸船机将喂料头吸取的物料连续输送至船舱外,提升物料运输效率。
技术特征:
1.一种船底清舱方法,其特征在于,船舱底部设有清舱机(10),所述清舱机(10)上设有集料斗(12);
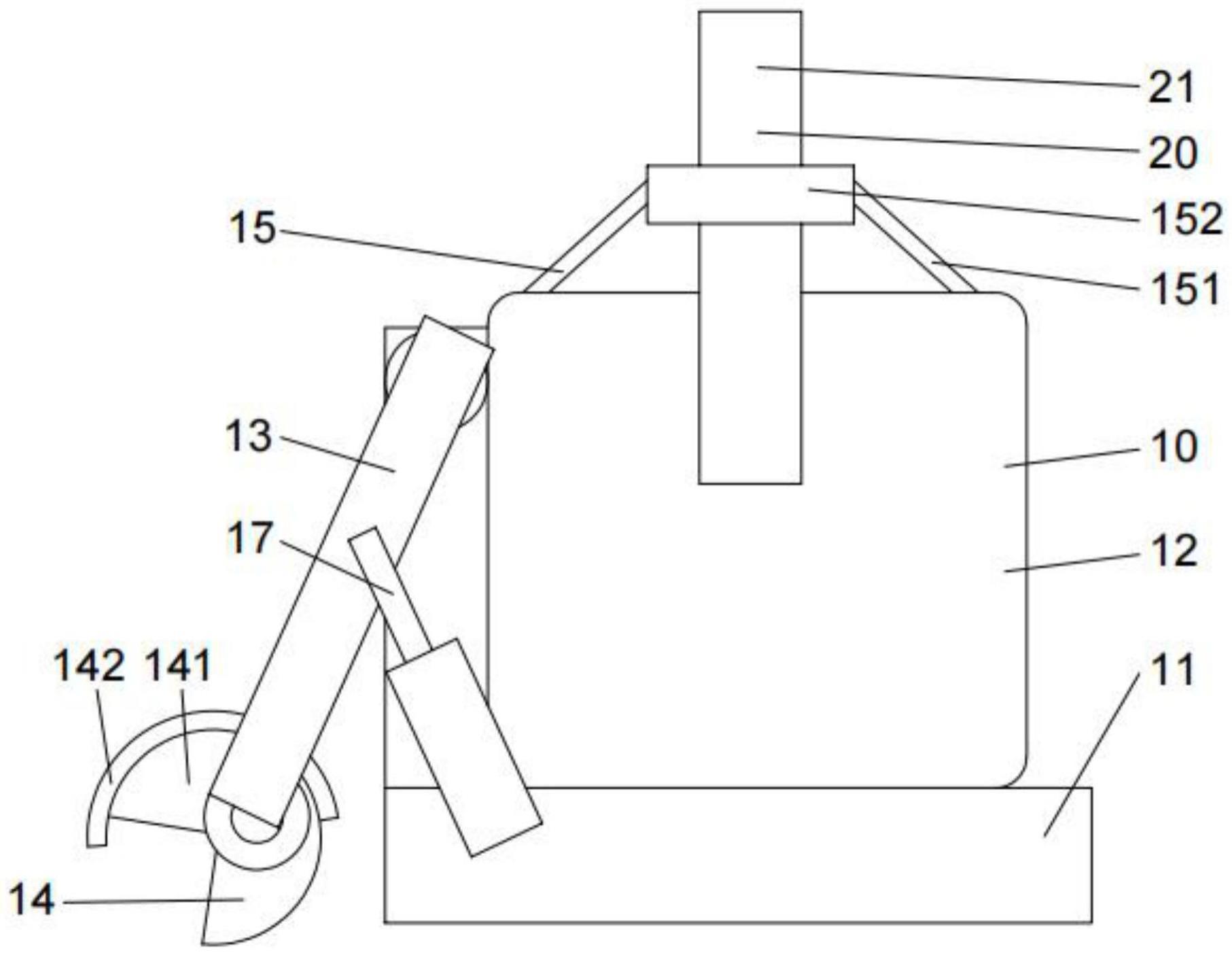
2.一种船底清舱系统,其特征在于,包括清舱机(10)和卸船机(20),所述清舱机(10)包括行走机构(11)、集料斗(12)、输送机构(13)、清扫机构(14)和用于控制所述清舱机(10)跟随所述卸船机(20)的喂料头(21)行走的随动控制机构(15),其中:
3.根据权利要求2所述的船底清舱系统,其特征在于:所述行走机构(11)为履带式行走机构。
4.根据权利要求2所述的船底清舱系统,其特征在于:所述输送机构(13)为取料螺旋,倾斜设置,其顶端铰接于所述行走机构(11),并通过固定在所述行走机构(11)上的驱动机构(17)调节其倾斜角度。
5.根据权利要求2所述的船底清舱系统,其特征在于:所述清扫机构(14)包括收集辊(141),所述收集辊(141)安装在所述输送机构(13)的进料端,且位于所述行走机构(11)的前方和/或后方,所述收集辊(141)上装配有盖板(142)。
6.根据权利要求2所述的船底清舱系统,其特征在于:所述随动控制机构(15)包括控制器和四根伸缩探测杆(151);
7.根据权利要求6所述的船底清舱系统,其特征在于:所述伸缩探测杆(151)上设有弹簧,且通过弹簧进行伸缩。
8.根据权利要求2所述的船底清舱系统,其特征在于:所述集料斗(12)的顶部设有防尘罩(16),所述喂料头(21)穿过防尘罩(16)。
9.根据权利要求2所述的船底清舱系统,其特征在于:所述行走机构(11)的行进速度为0.1m/s~0.3m/s。
技术总结
本发明公开了一种船底清舱方法及清舱系统,其中,船舱底部设有清舱机,清舱机上设有集料斗;船底清舱方法包括如下步骤:将卸船机的喂料头插入集料斗内以吸取集料斗内的物料,卸船机将喂料头吸取的物料输送至船舱外;根据船舱内物料分布情况控制喂料头在集料斗内平移运动,清舱机在船舱底部跟随喂料头行走以对船舱底部清扫,并将清扫后的物料收集至集料斗内。本发明将喂料头插入清扫机的集料斗中,通过清舱机在船舱底部边行走边收集物料,喂料头不会与船舱底部接触相撞,也无需装载机将物料运载至集料斗,减少物料飞扬;通过清舱机跟随置于集料斗内的喂料头进行行走,以使集料斗连续地为喂料头输送物料,提升物料运输效率。
技术研发人员:袁本森,严瑜
受保护的技术使用者:上海亿博机电设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!