门座式起重机作业安全警示系统的制作方法
本发明涉及门座式起重机,具体的,涉及门座式起重机作业安全警示系统。
背景技术:
1、门座式起重机因具有操作灵活、适用性强、作业货类多等特点,已成为我国港口配置数量最多的大型装卸设备之一。在作业过程中,会涉及到门座式起重机与舱内设备交互作业的情况,在此过程中门座式起重机进舱取货出舱撒货,铲车必须要作出及时有效的避让。其中起重作业中的设备交互避让问题一直是行业的重点关注问题,当门座式起重机向舱外撒货时,前场倒运设备由于视线范围的存在盲区不能及时对门座式起重机作出避让;当门座式起重机与舱内清舱设备交替作业时,门座式起重机操作员仅借助司机室摄像头和舱口指挥工指挥与舱内设备配合进行定点抓取作业,由于舱内环境和设备司机视线范围局限性,舱内设备司机无法提前判定门机抓斗下落方位,避让到安全位置,舱内作业存在较大的安全隐患。
技术实现思路
1、本发明提出门座式起重机作业安全警示系统,解决了相关技术中门座式起重机在交叉作业时存在安全隐患的问题。
2、本发明的技术方案如下:
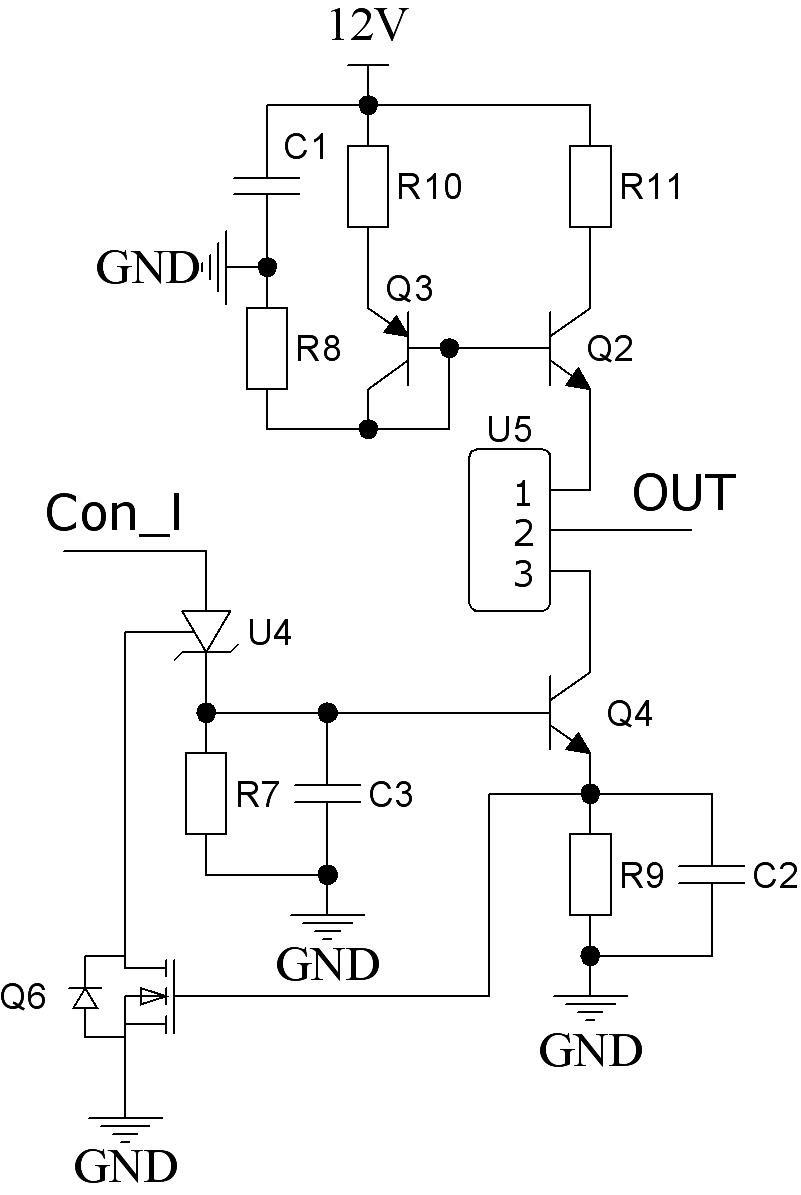
3、门座式起重机作业安全警示系统,包括位置检测电路、报警电路、主控单元和无线通信单元,所述位置检测电路连接所述主控单元,所述主控单元通过所述无线通信单元与报警电路通讯连接,所述位置检测电路包括控制管u4、电阻r7、三极管q4、电阻r9、开关管q6、位移传感器u5、三极管q3、三极管q2、电阻r8、电阻r10和电阻r11,
4、所述控制管u4的阳极连接所述主控单元的第一输出端,所述控制管u4的阴极通过所述电阻r7接地,所述控制管u4的阴极连接所述三极管q4的基极,
5、所述电阻r10的第一端连接12v电源,所述电阻r10的第二端连接所述三极管q3的发射极,所述电阻r11的第一端连接12v电源,所述电阻r11的第二端连接所述三极管q2的集电极,所述三极管q3的基极连接所述三极管q2的基极,所述三极管q3的基极连接所述三极管q3的集电极,所述三极管q3的集电极通过所述电阻r8接地,所述三极管q2的发射极连接所述位移传感器u5的第一供电端,所述位移传感器u5的输出端连接所述主控单元的第一输入端,所述位移传感器u5的第二供电端连接所述三极管q4的集电极,所述三极管q4的发射极通过所述电阻r9接地,所述三极管q4的发射极连接所述开关管q6的控制端,所述开关管q6的第一端连接所述控制管u4的控制极,所述开关管q6的第二端接地。
6、进一步,本发明中还包括放大电路,所述放大电路包括电阻r2、电阻r3、运放u1、电阻r1、电阻r4、电阻r5、运放u2和电阻r6,所述电阻r2的第一端连接所述位移传感器u5的输出端,所述电阻r2的第二端连接所述运放u1的反相输入端,所述运放u1的同相输入端通过所述电阻r3接地,所述运放u1的输出端通过所述电阻r1连接所述运放u1的反相输入端,所述运放u1的输出端通过所述电阻r5连接所述运放u2的反相输入端,所述运放u2的同相输入端通过所述电阻r4接地,所述运放u2的输出端通过所述电阻r6连接所述运放u2的反相输入端,所述运放u2的输出端连接所述主控单元的第一输入端。
7、进一步,本发明中所述运放u2的输出端和所述主控单元的第一输入端之间还设有滤波电路,所述滤波电路包括电阻r12、电阻r13、电容c7、运放u3、电阻r14、电阻r15和电容c8,所述电阻r12的第一端连接所述运放u2的输出端,所述电阻r12的第二端连接所述电阻r13的第一端,所述电阻r13的第二端通过所述电容c7接地,所述电阻r13的第二端连接所述运放u3的同相输入端,所述运放u3的反相输入端通过所述电阻r15接地,所述运放u3的输出端通过所述电阻r14连接所述运放u3的反相输入端,所述运放u3的输出端通过所述电容c8连接所述电阻r12的第二端,所述运放u3的输出端连接所述主控单元的第一输入端。
8、进一步,本发明中所述报警电路包括光耦u6、电阻r17、电阻r16、开关管q1和发光二极管led1,所述光耦u6的第一输入端连接所述无线通信单元的输出端,所述光耦u6的第二输入端接地,所述光耦u6的第一输出端通过所述电阻r17连接5v电源,所述光耦u6的第二输出端通过所述电阻r16连接所述开关管q1的控制端,所述开关管q1的第一端连接5v电源,所述开关管q1的第二端连接所述发光二极管led1的阳极,所述发光二极管led1的阴极接地。
9、进一步,本发明中还包括测距单元,所述测距单元连接所述主控单元,所述测距单元包括激光发射电路和激光接收电路,所述激光发射电路包括电阻r19、运放u7、电阻r18、电阻r21、三极管q5和激光发射器ld,所述运放u7的同相输入端连接主控单元的第二输出端,所述运放u7的反相输入端通过所述电阻r19接地,所述运放u7的输出端通过所述电阻r18连接所述三极管q5的基极,所述三极管q5的集电极连接5v电源,所述三极管q5的基极通过所述电阻r21连接5v电源,所述三极管q5的发射极连接所述激光发射器ld的阳极,所述激光发射器ld的阴极接地。
10、进一步,本发明中所述激光接收电路包括激光接收器d1、电阻r25、电阻r24、运放u9和电阻r23,所述激光接收器d1的第一端连接5v电源,所述激光接收器d1的第二端通过所述电阻r25接地,所述激光接收器d1的第二端连接所述运放u9的同相输入端,所述运放u9的反相输入端通过所述电阻r24接地,所述运放u9的输出端通过所述电阻r23连接所述运放u9的反相输入端,所述运放u9的输出端连接所述主控单元的第二输入端。
11、本发明的工作原理及有益效果为:
12、本发明中,位置检测电路用于检测门座式起重机机械臂的旋转角度,并将门座式起重机机械臂的旋转角度转为相应的电信号送至主控单元,当门座式起重机机械臂的旋转角度旋转到指定位置时,主控单元通过无线通信单元向报警电路发出指令,报警电路发出报警信号,报警电路设置在舱内作业的铲车上,当门座式起重机机械臂的旋转到指定位置时,提醒舱内作业的铲车司机及时驶离,以免门座式起重机在交叉作业时产生安全隐患。
13、位置检测电路的工作原理为:工作时,主控单元的第一输出端输出高电平信号,控制管u4的控制极为高电平,控制管u4导通,三极管q4也导通,三极管q3和三极管q2导通,位移传感器u5通电开始工作。三极管q2和三极管q2构成恒流源,如果电源电压变大时,流过位移传感器u5的工作电流变大,电阻r8上的分压变大,这时三极管q3的基极电流变大,从而使流过三极管q3集电极的电流减小,当三极管q3集电极电流减小时,三极管q2的基极电流减小,从而使流过位移传感器u5的电流减小;当电源电压变小时,流过位移传感器u5的工作电流变小,电阻r8上的分压也变小,这时三极管q3的基极电流变减小,从而使流过三极管q3集电极的电流变大,当三极管q3集电极电流变大时,三极管q2的基极电流也变大,从而使流过位移传感器u5的电流变大。
14、其中,电阻r9为采样电阻,用于采集流过位移传感器u5的电流大小,当位移传感器u5的工作电流过大时,可能会直接将位移传感器u5烧毁,因此,采集电阻r9上的电压,当位移传感器u5的工作电流正常时,电阻r9上的电压小于开关管q6的开启电压,开关管q6截止,开关管q6的第一端为高电平,控制管u4正常导通;当位移传感器u5的工作电流超过设定值时,电阻r9上的电压大于开关管q6的开启电压,开关管q6导通,开关管q6的第一端为低电平,控制管u4控制极变为低电平,控制管u4截止,开关管q4也截止,这时位移传感器u5停止工作,避免因位移传感器u5的工作电流过大而造成损坏。
15、因此,本发明中的位移传感器u5可以工作在恒流状态,使位移传感器u5工作状态不受环境的影响,提高电路检测精度,工作时,随着门座式起重机机械臂的旋转,位移传感器u5的输出端输出不同的电信号送至主控单元的第一输入端。同时,本发明还可以起到保护位移传感器u5的作用,当位移传感器u5的工作电流超过设定值时,位移传感器u5停止工作,以免损坏位移传感器u5,相比于传统的位置检测电路而言,本发明中的位置检测电路有更好的稳定性和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!