一种上料机器人的制作方法
本发明涉及一种自动化设备,具体涉及一种上料机器人。
背景技术:
1、机械手臂能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
2、一些具有正反面的小型片状产品,在其组装或加工过程中,对其摆放的方位是有严格要求的,比如需要正面朝上或反面朝上,针对该类产品的自动上料工作,通常是先利用振动盘振动,使得振动盘上的物料被打散、翻面,然后再配合视觉系统,根据相机拍摄的图像,筛选并计算出合格产品的位置,最后由机械手抓取、移动实现上料。
3、ppu凸轮机械手是常见的一种高速拾放移动机械手,常用于产品的自动上料,但是ppu机械手只能实现两点之间的抓取搬运,为了适应上述柔性产品的自动上料,通常的做法是给ppu机械手增加一组十字模组,通过十字模组实现ppu机械手在x-y轴方向上的直线移动,从而实现快速、准确地抓取动作。
4、但是上述做法,存在以下不足:上料动作时,先利用振动盘振动,使产品分散、翻面,然后拍照定位,最后十字模组与ppu机械手同步动作,抓取产品实现上料转运,当ppu机械手将定位到的所有产品抓取完毕后,十字模组与ppu机械手复位到初始位置,振动盘再次振动,使产品分散、翻面,然后拍照定位,最后十字模组与ppu机械手再次同步动作,抓取产品实现上料转运,如此循环往复。
5、但是,在每次动作循环完成后,十字模组与ppu机械手均需要先复位并停止动作,等振动盘振动与拍照定位完后后,再重新启动抓取产品实现上料,大大影响了上料速度。
技术实现思路
1、为了克服背景技术的不足,本发明提供一种上料机器人。
2、本发明所采用的技术方案:一种上料机器人,包括基座,所述基座上安装有用于将产品分散、翻面的振动机构、用于拍照定位的视觉检测机构以及带有第一机械手的ppu模组;所述振动机构包括摆臂、底座以及若干振动组件,所述摆臂一端与基座水平旋转连接,并连接有能驱使其水平旋转摆动的第一动力源;所述底座可旋转地安装在摆臂的另一端,并连接有能驱使其旋转动作的第二动力源;若干振动组件以底座的旋转中心为圆心周向分布在底座上。
3、所述振动组件包括振动盘以及能驱使振动盘振动动作的振动源;所述振动组件设有两组,所述振动盘整体呈半圆形。
4、所述摆臂与基座连接的一端设有向外延伸的支架,所述第二动力源安装在支架上,所述第二动力源采用减速电机,并通过带传动与底座传动配合。
5、所述ppu模组包括固定背板、第三动力源、导轨总成、主轴、摆线轮、摆线框、联动轴;所述固定背板固定安装在基座上;所述导轨总成包括固定轨道、活动轨道以及滑块,所述固定轨道与活动轨道交叉设置并通过滑块相对活动连接;所述第三动力源安装在固定背板背面,其输出轴驱动连接主轴,并与主轴偏心设置;所述摆线轮套设在主轴外,并与主轴旋转配合,所述摆线轮外边缘均布有若干摆线轴承;所述摆线框固定设置在固定背板正面,所述摆线框内壁对应摆线轴承的位置形成有摆线轮廓曲面,所述摆线轴承与摆线轮廓曲面相贴合形成滚动配合;所述联动轴一端穿过其中一个摆线轴承中心设置,另一端连接活动轨道;所述第一机械手安装在活动轨道上。
6、所述摆线轮廓曲面的轮廓呈圆角方形。
7、所述摆线轴承设有3个。
8、所述第一机械手包括固定座、第一吸嘴座、第一吸嘴;所述固定座固定安装在ppu模组上,所述第一吸嘴座可旋转地安装在固定座上,并连接有驱使其旋转动作的第四动力源,所述第一吸嘴固定安装在第一吸嘴座上。
9、所述ppu模组包括导轨总成,所述导轨总成包括纵向设置的固定轨道、横向设置的活动轨道以及连接固定轨道与活动轨道的滑块;还包括第二机械手,所述第一机械手与第二机械手间隔设置在活动轨道上。
10、所述基座上还设有能与第一机械手、第二机械手相对齐的定位夹具。
11、本发明的有益效果是:采用上述上料机器人,ppu模组的位置保持相对固定,而是通过振动机构的旋转摆动动作去配合ppu模组实现准确抓取,结构更加紧凑,同时振动机构包括若干振动组件,可提前振动,配合视觉检测机构可实现连续性作业,减少等待时间,大大提高工作效率。
技术特征:
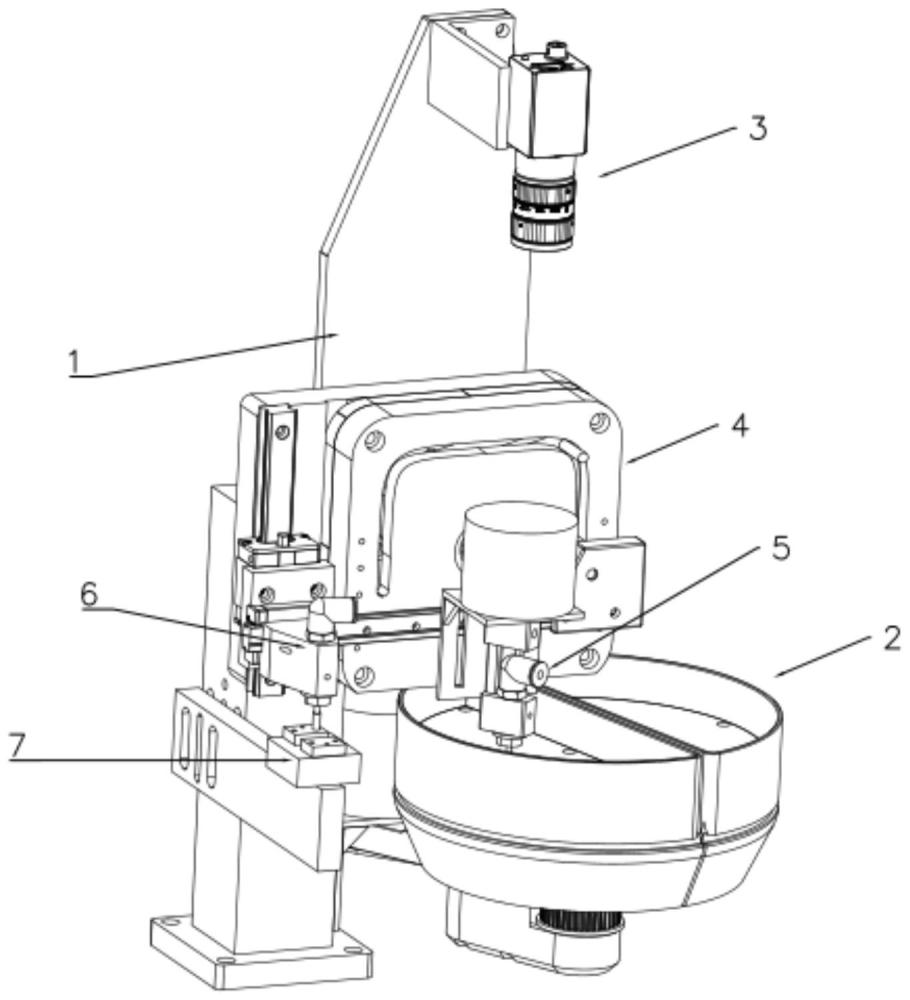
1.一种上料机器人,包括基座(1),所述基座(1)上安装有用于将产品分散、翻面的振动机构(2)、用于拍照定位的视觉检测机构(3)以及带有第一机械手(5)的ppu模组(4);
2.根据权利要求1所述的上料机器人,其特征在于:所述振动组件(23)包括振动盘(231)以及能驱使振动盘(231)振动动作的振动源(232);所述振动组件(23)设有两组,所述振动盘(231)整体呈半圆形。
3.根据权利要求1所述的上料机器人,其特征在于:所述摆臂(21)与基座(1)连接的一端设有向外延伸的支架(26),所述第二动力源(25)安装在支架(26)上,所述第二动力源(25)采用减速电机,并通过带传动与底座(22)传动配合。
4.根据权利要求1所述的上料机器人,其特征在于:所述ppu模组(4)包括固定背板(41)、第三动力源(42)、导轨总成(43)、主轴(44)、摆线轮(45)、摆线框(46)、联动轴(47);
5.根据权利要求4所述的上料机器人,其特征在于:所述摆线轮廓曲面(61)的轮廓呈圆角方形。
6.根据权利要求4或5所述的上料机器人,其特征在于:所述摆线轴承(51)设有3个。
7.根据权利要求1所述的上料机器人,其特征在于:所述第一机械手(5)包括固定座(51)、第一吸嘴座(52)、第一吸嘴(53);所述固定座(51)固定安装在ppu模组(4)上,所述第一吸嘴座(52)可旋转地安装在固定座(51)上,并连接有驱使其旋转动作的第四动力源(54),所述第一吸嘴(53)固定安装在第一吸嘴座(52)上。
8.根据权利要求1所述的上料机器人,其特征在于:所述ppu模组(4)包括导轨总成(43),所述导轨总成(43)包括纵向设置的固定轨道(431)、横向设置的活动轨道(432)以及连接固定轨道(431)与活动轨道(432)的滑块(433);
9.根据权利要求8所述的上料机器人,其特征在于:所述基座(1)上还设有能与第一机械手(5)、第二机械手(6)相对齐的定位夹具(7)。
技术总结
一种上料机器人,其特征在于:振动机构包括摆臂、底座以及若干振动组件,摆臂一端与基座水平旋转连接,并连接有能驱使其水平旋转摆动的第一动力源;底座可旋转地安装在摆臂的另一端,并连接有能驱使其旋转动作的第二动力源;若干振动组件以底座的旋转中心为圆心周向分布在底座上。采用以上方案,PPU模组的位置保持相对固定,而是通过振动机构的旋转摆动动作去配合PPU模组实现准确抓取,结构更加紧凑,同时振动机构包括若干振动组件,可提前振动,配合视觉检测机构可实现连续性作业,减少等待时间,大大提高工作效率。
技术研发人员:陈涵
受保护的技术使用者:温州市日康机械科技厂
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!