车载大型无人直升机吊运装置的制作方法
本发明涉及一种大型无人直升机的吊运装置,特别涉及一种不需使用吊车就可将大型无人直升机吊运进出车载方舱或厢式舱体的装置,属于特种车辆起重。
背景技术:
1、大型无人直升机顶部设有主旋翼,尾部设有尾旋翼,机身较长,具有装载量大、续航时间长等优点,在森林防护、石油管道巡检、地质勘查等众多领域的运用日益广泛。伴随着大型无人直升机的续航、机载能力的不断提升,以及其性能和功能的不断拓展和完善,使得大型无人直升机自身的体积和重量都有所增加,这也为大型无人直升机的转运等保障任务带来了考验。
2、目前,大型无人直升机大多配备随车吊进行上下车的吊运装卸,用平板挂车进行运输转场,在敞开的平板挂车上还需用篷布遮蔽大型无人直升机,并用绳索绑扎固定。该种吊装转场方式存在着耗时长、成本高和安全性较差等缺陷,且无法满足应急快速反应的要求。
技术实现思路
1、本发明的目的是提供一种结构紧凑,使用方便,能快速装卸且可靠性高的车载大型无人直升机吊运装置。
2、本发明通过以下技术方案予以实现:
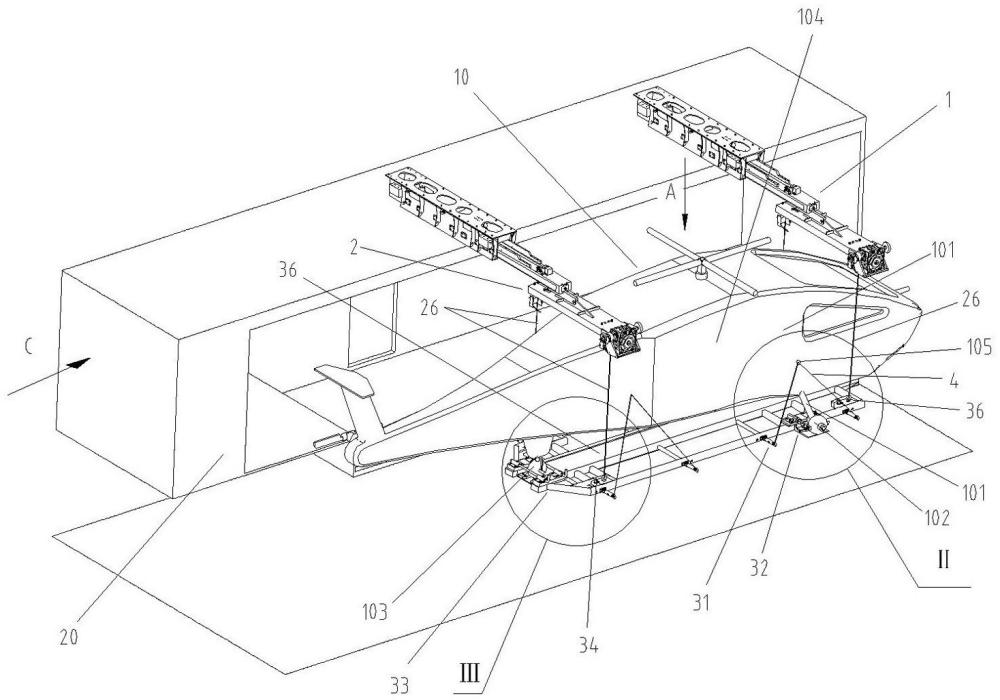
3、一种车载大型无人直升机吊运装置,包括一对固定在舱顶壁下侧中部且垂直于舱顶壁的吊臂机构、位于吊臂机构下侧的起重机构和支承大型无人直升机的吊装托架;
4、所述吊臂机构包括固定臂、移动臂、吊架机构和移动臂及吊架移动机构,所述固定臂包括2根边杆和顶板,槽钢制成的边杆开口侧朝外,所述开口侧内焊有间隔排列的数块垂直筋板,所述顶板两侧分别与槽钢上侧焊连成三面围合底部敞开的结构,所述顶板垂直于舱顶壁,顶板两侧分别通过多个紧固螺钉固定在舱顶壁下侧;所述移动臂的横截面呈两个并排的工字型,所述两个并排的工字型的顶部为整体结构,移动臂底部留有通槽;间隔排列的支撑外导向滚轮的外芯轴一端分别固定在固定臂的边杆内侧面上,移动臂嵌入固定臂下部内,外导向滚轮分别支撑住移动臂两侧的外槽口上侧,移动臂及吊架移动机构设置在移动臂一端上;所述吊架机构设置在移动臂的下侧,包括移动槽形块、三角板和连接块,所述移动槽形块上部嵌入移动臂下侧内,且与移动臂及吊架移动机构衔接;间隔排列的支撑内导向滚轮的内芯轴一端分别固定在在移动槽形块两侧上,内导向滚轮分别支撑在移动臂内侧的内槽口下侧;移动槽形块移动时,移动槽形块下部伸出移动臂下部,三角板上部与移动槽形块下部一端铰接,三角板下侧与起重机构上侧中部固连;连接块上端嵌入在移动槽形块下部另一端内,且与移动槽形块下部铰接,连接块下端固定在起重机构上侧另一端上;
5、所述吊装托架为矩形钢管焊接而成的矩形框架结构,所述矩形框架的长度和宽度与大型无人直升机起落架的两前轮和一后轮的位置匹配,矩形框架两侧分别间隔设有2组下撑杆组合,每组包括2个下撑杆组合,大型无人直升机机身两侧前后端的系留环分别通过紧固绳与相邻的2个下撑杆组合连接成三角形稳定结构,将大型无人直升机机身固定在吊装托架上;大型无人直升机起落架的两前轮和一后轮分别通过对应的前轮锁定架和后轮锁定架锁定在吊装托架上;吊装托架四角分别通过t形扳手固定在舱体地板上,起吊环分别固定在t形扳手相邻处的吊装托架两端上。
6、本发明的目的还可以通过以下技术措施来进一步实现。
7、进一步的,所述移动臂及吊架移动机构包括上丝杆、下丝杆、丝杆驱动电机减速机组合、分动箱、上传动螺母组合、下传动螺母、上丝杆轴承座和下丝杆轴承座,丝杆驱动电机减速机组合一端固定在分动箱一侧上,分动箱另一侧固定在移动臂一端端头的支撑座上,丝杆驱动电机减速机组合输出端通过分动箱和上下排列的上联轴器、下联轴器分别与上丝杆一端及下丝杆一端固连,上丝杆另一端通过上丝杆轴承座固定在移动臂另一端上侧;上传动螺母组合包括上支架和上传动螺母,所述上传动螺母固定在上支架下端中,上支架顶面固定在固定臂的顶板内侧一端上;上传动螺母旋合在上丝杆上,下传动螺母旋合在下丝杆上,下传动螺母一端固定在相邻的移动槽形块一端上;下丝杆另一端通过下丝杆轴承座支承在移动臂另一端中。
8、进一步的,所述分动箱包括箱盖、箱体、上齿轮、中齿轮、下齿轮、上轴、中轴和下轴,所述箱盖固定在垂直设置的箱体一侧上,丝杆驱动电机减速机组合一端固定在箱盖一侧上;上齿轮固定上轴中部上,上轴一端伸进丝杆驱动电机减速机输出端内,上轴两端、中轴两端和下轴两端分别通过分动箱轴承依次支撑在箱盖上端和箱体另一侧上端,箱盖中部和箱体另一侧中部,以及箱盖下部和箱体另一侧下部上;上齿轮、中齿轮和下齿轮分别固定在各自对应的上轴中部、中轴中部和下轴中部上,位于分动箱内的上齿轮、中齿轮和下齿轮从上至下依次啮合;上轴另一端和中轴另一端分别伸出箱体另一侧,通过上联轴器和下联轴器分别与各自对应的上丝杆一端和下丝杆一端固连;下轴一端端头伸出箱盖,第一链轮固定在下轴一端端头上,第一环形链条上部与第一链轮啮合。
9、进一步的,所述上丝杆和下丝杆均为梯形螺纹,且上丝杆和下丝杆的梯形螺纹的旋向相反,上传动螺母和下传动螺母的梯形螺纹亦旋向相反。
10、进一步的,所述起重机构包括起重横梁、起重传动轴、起重传动电机减速机组合和减速机联轴器,以及2个卷扬滚筒、分别绕在卷扬滚筒上的起重钢丝绳、2个起重传动轴轴承座和2个起重传动联轴器,所述起重横梁呈槽形,所述槽形的开口向下,所述三角板下部与起重横梁上侧中部焊接固连,连接块下端通过紧固件固定在呈槽形的起重横梁顶面另一端上;卷扬滚筒两端的倒l形支架顶部分别固定在起重横梁的两端端头下,起重传动轴两端分别支撑在起重传动轴轴承座中,起重传动轴轴承座分别固定在起重横梁的槽形顶板两端下,起重传动轴两端端头分别通过起重传动联轴器与卷扬滚筒中心轴一端固定连接;远离三角板的卷扬滚筒中心轴另一端伸出对应的倒l形支架上部,通过减速机联轴器与起重传动电机减速机组合输出轴固定连接;起重传动电机减速机组合底部固定在吊架的底板内侧面上,吊架的侧板上端分别固定在起重横梁的一端两侧上;起重横梁两端下的卷扬滚筒上的起重钢丝绳下端端头分别与吊装托架四角的起吊环连接。
11、进一步的,所述起重传动电机减速机组合的减速机为蜗轮蜗杆减速机,蜗轮蜗杆减速机的蜗杆一端与第二链轮固定连接,第二环形链上部与第二链轮啮合。
12、进一步的,所述下撑杆组合包括铰接座、下撑杆和吊环螺栓,所述铰接座2个一组分别固定在吊装托架的纵向侧面两端上,下撑杆一端与铰接座铰接,吊环螺栓固定在下撑杆另一端上;在铰接座一侧的吊装托架和下撑杆一侧中部分别固设有磁性板,吊装托架空载时,下撑杆转动至平行于吊装托架的纵向侧面,磁性板彼此吸合,从而将下撑杆固定在吊装托架的纵向侧面上;吊装托架承载大型无人直升机时,下撑杆转动至垂直于吊装托架的纵向侧面,大型无人直升机机身前后端的系留环分别位于2个一组的下撑杆之间,紧固绳上下端分别与系留环和对应的吊环螺栓拉紧连接成三角形稳定结构,将大型无人直升机固定在吊装托架上。
13、进一步的,所述前轮锁定架包括上底座、l形前轮托板、2根伸缩杆和2根伸缩杆座,所述上底座分别固定在吊装托架前部两侧上,平行排列的2根伸缩杆座分别横置固定在上底座上,伸缩杆座的座孔与伸缩杆的横截面匹配;l形前轮托板分别固定在吊装托架的外侧,且与2根伸缩杆的位置对应;弹性锁定销分别固定在伸缩杆座一侧上,且两者轴线彼此垂直,弹性锁定销分别将伸缩杆锁定在伸出使用状态或缩回收纳状态;伸出的2根伸缩杆相邻内侧面的间距与前轮直径匹配;锁定大型无人直升机下部的起落架时,大型无人直升机的一对前轮分别支撑在l形前轮托板上侧,前轮圆周分别被2根伸出的伸缩杆的相邻面锁定。
14、进一步的,所述后轮锁定架包括并排横置在吊装托架朝向大型无人直升机尾部一端端头的2根后轮锁定杆和2组每组2个后轮锁定座,所述后轮锁定杆呈l形,后轮锁定杆的横截面为圆形,后轮锁定座呈几字形,后轮锁定杆与后轮锁定座的座孔匹配,2个一组并排的后轮锁定座间隔固定在吊装托架的后端上,分别插入后轮锁定座中的2根后轮锁定杆相邻母线的间距与后轮直径匹配;锁定大型无人直升机下部的起落架时,后轮嵌在2根后轮锁定杆之间,后轮圆周被2根后轮锁定杆的相邻母线锁定。
15、进一步的,吊装托架背离舱体的四联门一侧设有吊装托架锁定导向机构,吊装托架锁定导向机构包括2根导向柱和2个导向座,所述导向柱间隔垂直固定在舱体地板上,所述导向座间隔嵌入焊接固定在吊装托架背离舱体的四联门一侧上,导向座与导向柱相邻一侧设有扇形导向口,所述扇形导向口的底部圆弧半径r与导向柱横截面半径r匹配;横移进舱的吊装托架锁定在舱体地板上前,导向座的扇形导向口的底部圆弧分别先抵靠在对应的导向柱上。
16、本发明在车载方舱或厢式车的舱顶壁下侧中部固定安装了一对垂直于舱顶壁的吊臂机构,采用双吊臂的组合形式,通过吊臂机构的移动臂同步移动和起重横梁两端卷扬滚筒的起重钢丝绳的同步升降,不需要随车吊,就可快速完成载着大型无人直升机吊装托架垂直升降和横移进出舱体。本发明结构紧凑、吊运精度高、占用空间小、承载力大、行程长、稳定性好。本发明的移动臂及吊架移动机构通过分动箱将丝杆驱动电机减速机组合一个动力源,就能驱动旋向相反的上丝杆和下丝杆快速旋转,实现了移动臂和移动槽形块的两节臂同步快速移动,显著提高了吊臂机构的展开和收纳速度,从而显著提高了起重作业效率,为提高大型无人直升机应急反应速度提供了可靠的保证。
17、本发明的优点和特点,将通过下面优选实施例的非限制性说明进行图示和解释,这些实施例,是参照附图仅作为例子给出的。
- 还没有人留言评论。精彩留言会获得点赞!