一种列车巡检机器人的转运装置和转运方法与流程
本发明涉及列车自动巡检,具体而言,涉及一种列车巡检机器人的转运装置和转运方法。
背景技术:
1、作为城市的交通动脉,地铁给市民带来了便利有序的出行环境,解决了部分城市交通拥堵的问题。其中地铁车辆的检修保养是其安全高效运营的保障。地铁车辆的检修工作主要在检修车辆段(简称车辆段)或者运用车辆段(简称停车场)的车辆检修库开展。
2、列车库内股道平行分布,为避免设备与列车在平交道发生碰撞,选定巡检机器人从检查坑侧面出入口进入检查坑,之后沿检修坑动行进并对停放于相应检修轨道上的地铁车辆关键部位进行检测。检测过程开始前,列检机器人需要被转运至检查坑,而检测结束后,列检机器人需要被转运出检查坑。所有检查坑作业的机器人均具有设备转运需求。
3、目前第一类转运方法是在检查坑局部区域通过回填形成斜坡连接地面和检查坑,列检机器人导航至斜坡驶入驶出检查坑;优点:方案简单;缺点:地面结构破坏程度高,基建改造量大,成本投入较高。
4、第二类转运方法是在地铁车辆驶入检修轨道前通过起吊装置将列检机器人直接吊入检查坑;优点:无需进行基建改造;缺点:起吊安全性较差,容易出现列检机器人碰撞、跌落受损的问题。
5、第三类转运方法是在检查坑固定点位铺设转运平台,开始检测任务时,列检机器人导航至固定入口位置,通讯命令提升平台由检查坑面举升至地面高度,列检机器人驶上提升平台,由平台下降将列检机器人带入检查坑;优点:相对第一类方法,基建改造量较小,实施便利,结构稳定性好,可以自主适应检查坑高度;缺点:但仍需对安装位置检查坑进行施工改造,并且位置固定,每条轨道需要单独配置一组转运机构,转运效率较低。
技术实现思路
1、有鉴于此,本发明提供一种列车巡检机器人的转运装置和转运方法,来解决上述的问题,以使巡检机器人能够被快速转运,脱离基建改造与固定转运位置的限制。
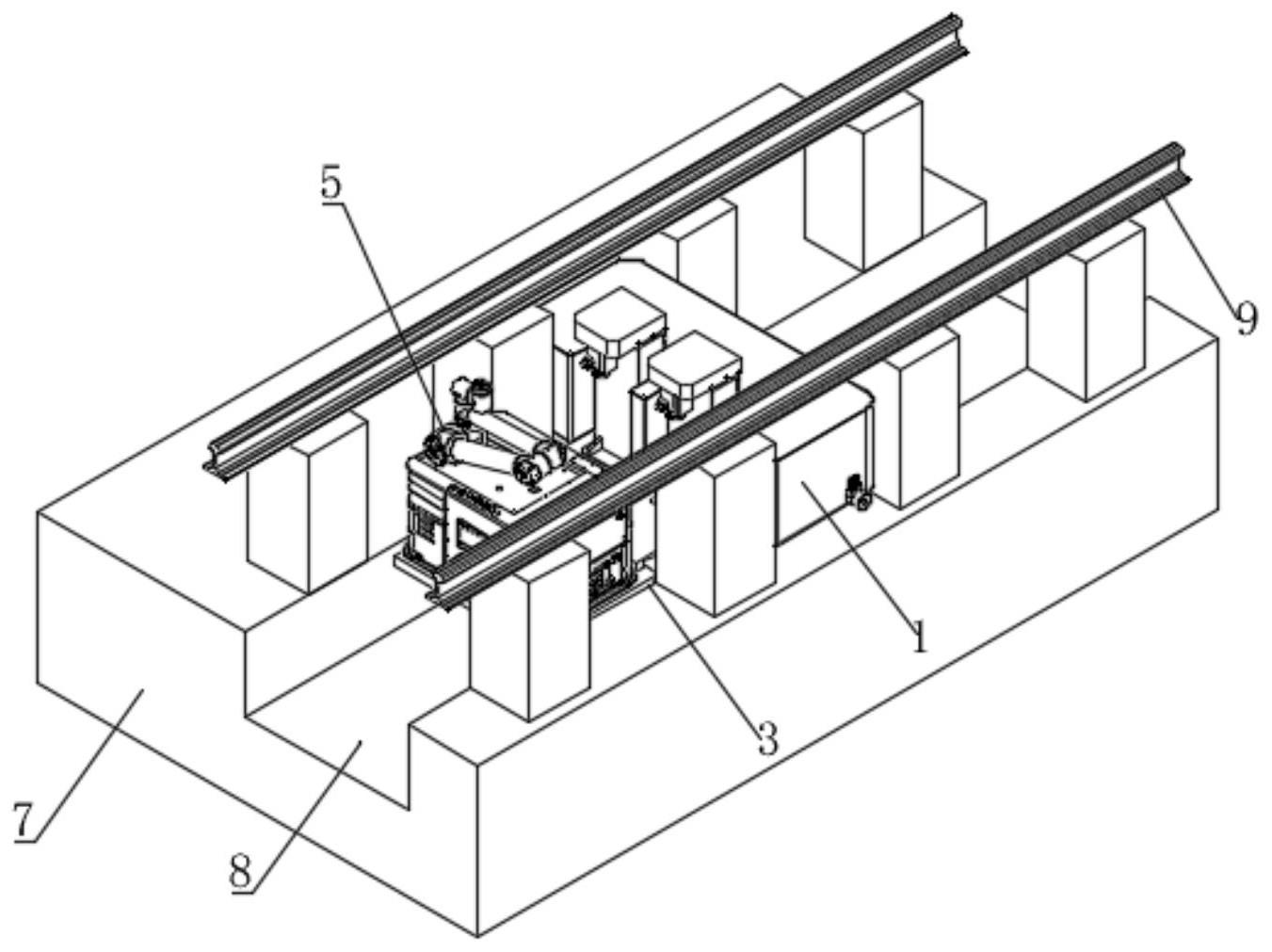
2、为解决以上技术问题,第一方面,本发明提供了一种转运装置,包括:设备主体,设备主体用于跨接检查坑,形成支撑巡检机器人转运的支撑平台; 升降机构,升降机构与设备主体固定连接;其一端设置有转运部;转运部包括互相呈滑动连接设置的伸缩部和承托部;承托部用于承接巡检机器人后,在升降机构的配合下将巡检机器人转运至作业平台;其中,设备主体内还设置有配重装置,当设备主体在跨接检查坑过程中,配重装置能够改变其与设备主体的相对位置来改变转运装置的整体重心。
3、作为一种可选方式,设备主体还包括移动组件、中央控制模块与位置定位单元,中央控制模块用于接收终端信号并驱动移动组件和/或配重装置。
4、作为一种可选方式,升降机构包括竖直固定在设备主体上的直线导轨以及可沿直线导轨延伸方向运动的转运连接板; 直线导轨上设置有滚珠丝杠和高扭矩同步带轮组件,滚珠丝杠的一端连接高扭矩同步带轮组件,另一端连接转运连接板。
5、作为一种可选方式,伸缩部固定在转运连接板上;承托部与伸缩部滑动连接,使得承托部可延伸出伸缩部;其中,承托部的一端设置成坡面。
6、作为一种可选方式,配重装置上设置有配重件,配重件可沿设备主体的搭接方向前后运动,当设备主体向任一方向进行搭接时,配重件反向运动至设备主体另一侧;其中,配重装置还包括滑轨、设置在滑轨内轨的丝杆与滑动平台,滑轨居中固定在设备主体上,且其轨道延伸方向与设备主体的至少一条边平行;滑动平台活动镶嵌于丝杆上,其能够沿着丝杆进行滑动,并形成用于承托配重件的承托平台。
7、另一方面,本发明还提供了一种列车巡检机器人的转运方法,采用上述的转运装置将巡检机器人运送至巡检检查坑,包括:转运装置自动导航定位到预设准备区域后,确认其与检查坑第一侧地面边缘的距离和最近的第一侧立柱的距离;在转运装置的端部移动至检查坑第一侧地面边缘时,矫正设备主体与左端第一侧立柱和右端第一侧立柱的相对距离;向第二侧地面进行移动,并根据移动情况,驱动配重装置和位置定位单元联合配合;当设备主体的一端到达第二侧地面后,通过位置定位单元矫正搭接准度,使得设备主体落在第二侧地面与检查坑第一侧地面边缘的部分相等;搭接准度矫正完成后,驱动伸缩部伸出,等待巡检机器人进入;待巡检机器人停留在伸缩部上后,启动升降装置,将巡检机器人送入作业平面,到达预设高度后,伸出承托部,使其一端搭接在作业平面上,形成巡检机器人到达地面的通路。
8、作为一种可选方式,转运装置在预设准备区域启动后,对移动路径进行规划,其包括:
9、接受中央调度后,通过位置定位单元自主导航定位确认到达作业平面的路线,移动至检查坑第一侧地面预设转运位置;其中,若在移动过程中出现与预设地图信息不一致或发生变动的位置,则进行局部路径重新规划。
10、作为一种可选方式,转运装置还设置有安全扫描距离,安全扫描距离是指通过位置定位单元布置的呈放射状动态移动的辐射距离,用于在转运装置移动过程中检测障碍物以进行避障;其中,当将巡检机器人送入作业平面后,缩小该距离。
11、作为一种可选方式,转运装置矫正距离包括:
12、在进行相对距离矫正时,向检查坑第一侧地面距离与设备主体最近的两个立柱发射光信号,并接收该两个立柱所反射的反射光信号;分别计算两次光信号传输时间,判断设备主体与任一第一侧立柱的距离值是否在预设范围内,若是,则向移动组件发出指令进行搭接;
13、在进行搭接准度矫正时,向检查坑第一侧地面边缘及检查坑第二侧地面边缘位于设备主体投影面上方的两根导轨发射光信号,并接收该两个导轨所反射的反射光信号;分别计算两次光信号的传输时间,判断设备主体分别与两侧导轨的相对距离是否位于预设范围内,若是,则向升降平台发出指令,准备转运。
14、本发明的有益效果为:
15、通过本发明所述的方案,可以摆脱对基建改造的依赖,使系统具备高灵活度,提高了其环境适应性。且减少了设备投入量,有效降低了综合成本。此外,在本方案的执行任务过程中,可以实现多设备运行时具备协同作业能力,提高了系统运维智能化程度。
技术特征:
1.一种转运装置,其特征在于,包括:
2.根据权利要求1所述的一种转运装置,其特征在于,所述设备主体还包括移动组件、中央控制模块与位置定位单元,所述中央控制模块用于接收终端信号并驱动所述移动组件和/或配重装置。
3.根据权利要求1所述的一种转运装置,其特征在于,所述升降机构包括竖直固定在设备主体上的直线导轨以及可沿所述直线导轨延伸方向运动的转运连接板;
4.根据权利要求3所述的一种转运装置,其特征在于,所述伸缩部固定在所述转运连接板上;所述承托部与伸缩部滑动连接,使得承托部可延伸出所述伸缩部;
5.根据权利要求1所述的一种转运装置,其特征在于,所述配重装置上设置有配重件,所述配重件可沿所述设备主体的搭接方向前后运动,当所述设备主体向任一方向进行搭接时,所述配重件反向运动至所述设备主体另一侧;其中,
6.一种列车巡检机器人的转运方法,其特征在于,采用如上述权利要求1-5任意一项所述的转运装置将巡检机器人运送至巡检检查坑,包括:
7.根据权利要求6所述的一种列车巡检机器人的转运方法,其特征在于,所述转运装置在预设准备区域启动后,对移动路径进行规划后自主移动,其包括:
8.根据权利要求7所述的一种列车巡检机器人的转运方法,其特征在于,所述转运装置还设置有安全扫描距离,所述安全扫描距离是指通过位置定位单元发散的呈放射状的扫描网络,该扫描网络所扫描的内容与范围能够跟随转运装置一起移动,用于在转运装置移动过程中检测障碍物以进行避障;其中,当将巡检机器人送入作业平面后,缩小该距离。
9.根据权利要求6所述的一种列车巡检机器人的转运方法,其特征在于,转运装置矫正距离包括:
技术总结
本发明公开了一种列车巡检机器人的转运装置和转运方法,使巡检机器人能够被快速转运,脱离基建改造与固定转运位置的限制。通过本发明所述的方案,可以摆脱对基建改造的依赖,使系统具备高灵活度,提高了其环境适应性。且减少了设备投入量,有效降低了综合成本。此外,在本方案的执行任务过程中,可以实现多设备运行时具备协同作业能力,提高了系统运维智能化程度。
技术研发人员:杨凯,梁斌,高春良,谢利明
受保护的技术使用者:成都盛锴科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!