一种电动举升控制系统的制作方法
本发明属于机电自动化,具体涉及一种电控和测算技术。
背景技术:
1、高机动雷达天线阵面的自动架撤技术必不可少,阵面举升用液压源作动力,阀控液压缸控制和驱动伸缩杆,推拉天线阵面竖起或倒伏。
2、现有技术以液压作动力,需要专门的液压源,通过管路连接到液压控制和驱动元件。连接点多,存在跑冒滴漏隐患,设备维护负担较大。车载环境移动频繁,各种振动冲击对管路接头影响大,更容易出现滴漏现象,降低系统的可靠性。
3、为了解决天线举升液压装置在维护性和可靠性两方面的问题,用电机加丝杆驱动。为了保证系统的能源效率,用传动效率高的滚珠丝杆。滚珠丝杆无法自锁,在掉电或驱动设备故障的情况下,存在安全问题。
技术实现思路
1、为了解决举升装置可靠、高效、安全的技术问题,采用了并联电驱动、双路同步控制的技术方案,用两根并联工作的永磁同步电机和滚珠丝杆代替传统的液压升降杆,具有保障升降杆同步、减小设备体积重量、降低功率损耗的技术效果。
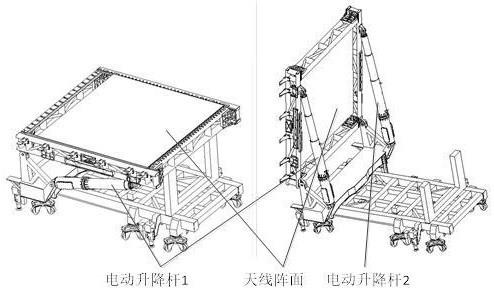
2、系统包括两根升降杆和控制机柜,升降杆的顶端连接天线阵面,底端连接天线基座,控制机柜通过电缆分别连接两根升降杆,控制升降杆伸缩,举升天线阵面,升降杆采集伸缩信息,发送到控制机柜,判断每根升降杆的工作状态和两根升降杆的同步状态。
3、升降杆外的固定部分有传感器,传感器内有拉绳和卷簧,升降杆外的活动部分有接头,拉绳固定于接头,升降杆内的永磁同步电机带动行星齿轮减速箱,经减速和增加驱动力矩后,驱动多级滚珠丝杆,带动升降杆外的活动部分伸缩,接头远离丝杆时,带动拉绳从传感器中拉出,接头靠近丝杆时,拉绳被卷簧拉回,传感器测量拉绳长度,计算升降杆的伸缩长度一。
4、永磁同步电机的旋转变压器是一种测角元件,实现磁场矢量控制和转速闭环控制,测量电机转角,除以减速机速比,再乘以滚珠丝杆螺距,计算出顶端的运动距离,换算出升降杆的伸缩长度二,前抱闸安装在电机出轴的最前端,后抱闸安装在电机绕组和旋转变压器之间,前抱闸和后抱闸独立锁定永磁同步电机。
5、控制机柜的380v三相电分配给两个电机驱动器,分别驱动两台永磁同步电机,220v单相电分配给两路直流电源,一路分配给主控模块、继电模块、两个电机驱动器,另一路分配给监控模块、两个继电器,监控模块通过两个继电器分别控制两个前抱闸。
6、进一步的,继电器和24v直流电源之间加装应急开关,按下断开继电器供电。
7、两个电机驱动器的状态信息、控制指令通过can总线一和主控模块、监控模块传输,两个传感器的状态信息通过can总线二和主控模块、监控模块传输,两路直流电源和继电模块的状态信息、控制指令通过can总线三和主控模块、监控模块传输,主控模块和监控模块相互监控。
8、正常情况下,主控模块根据预设的启动、加速、匀速、减速、停止指令控制永磁同步电机,同时控制后抱闸锁定,发现异常时,监控模块通过继电器控制前抱闸锁定并报警。
9、主控模块和监控模块接收传感器测算的伸缩长度一和旋转变压器换算的伸缩长度二,如果两根升降杆的四个伸缩长度相同,则判定系统正常,如果同一根升降杆的两个伸缩长度相同,则判定该升降杆正常,如果一根升降杆的伸缩长度一和另一根正常升降杆的伸缩长度不同、伸缩长度二相同,则判定该升降杆的传感器或滚珠丝杆异常,反之则判定永磁同步电机异常。
技术特征:
1.一种电动举升控制系统,其特征在于,包括:两根升降杆和控制机柜,升降杆的顶端连接天线阵面,底端连接天线基座,控制机柜通过电缆分别连接两根升降杆,控制升降杆伸缩,举升天线阵面,升降杆采集伸缩信息,发送到控制机柜,判断每根升降杆的工作状态和两根升降杆的同步状态。
2.根据权利要求1所述的电动举升控制系统,其特征在于,所述升降杆外的固定部分有传感器,传感器内有拉绳和卷簧,升降杆外的活动部分有接头,拉绳固定于接头,升降杆内的永磁同步电机带动行星齿轮减速箱,经减速和增加驱动力矩后,驱动多级滚珠丝杆,带动升降杆外的活动部分伸缩,接头远离丝杆时,带动拉绳从传感器中拉出,接头靠近丝杆时,拉绳被卷簧拉回,传感器测量拉绳长度,计算升降杆的伸缩长度一。
3.根据权利要求2所述的电动举升控制系统,其特征在于,所述永磁同步电机有旋转变压器测量电机转角,除以减速机速比,再乘以滚珠丝杆螺距,计算出顶端的运动距离,换算出升降杆的伸缩长度二,还有后抱闸和旋转变压器的供电线路串联,还有前抱闸,和后抱闸均独立锁定电机。
4.根据权利要求3所述的电动举升控制系统,其特征在于,所述控制机柜有380v三相电,分配给两个电机驱动器,分别驱动两台永磁同步电机,还有220v单相电,分配给两路直流电源,一路分配给主控模块、继电模块、两个电机驱动器,另一路分配给监控模块、两个继电器,监控模块通过两个继电器分别控制两个前抱闸。
5.根据权利要求4所述的电动举升控制系统,其特征在于,所述继电器和24v直流电源之间加装应急开关,按下断开继电器供电。
6.根据权利要求4所述的电动举升控制系统,其特征在于,所述两个电机驱动器的状态信息、控制指令通过can总线一和主控模块、监控模块传输,两个传感器的状态信息通过can总线二和主控模块、监控模块传输,两路直流电源和继电模块的状态信息、控制指令通过can总线三和主控模块、监控模块传输,主控模块和监控模块相互监控。
7.根据权利要求4所述的电动举升控制系统,其特征在于,还包括:正常情况下,主控模块根据预设的启动、加速、匀速、减速、停止指令控制永磁同步电机,同时控制后抱闸锁定,发现异常时,监控模块通过继电器控制前抱闸锁定并报警。
8.根据权利要求6所述的电动举升控制系统,其特征在于,还包括:主控模块和监控模块接收传感器测算的伸缩长度一和旋转变压器换算的伸缩长度二,如果两根升降杆的四个伸缩长度相同,则判定系统正常,如果同一根升降杆的两个伸缩长度相同,则判定该升降杆正常,如果一根升降杆的伸缩长度一和另一根正常升降杆的伸缩长度不同、伸缩长度二相同,则判定该升降杆的传感器或滚珠丝杆异常,反之则判定永磁同步电机异常。
技术总结
一种电动举升控制系统,包括两根升降杆和控制机柜,系统升降杆的顶端连接天线阵面,底端连接天线基座,控制机柜通过电缆分别连接两根升降杆,控制升降杆伸缩,举升天线阵面,升降杆的传感器和旋转变压器分别采集伸缩信息,发送到控制机柜,判断每根升降杆的工作状态和两根升降杆的同步状态。
技术研发人员:王闻喆,陈诚,娄华威,杜浩博,刘敏,林斌
受保护的技术使用者:中国电子科技集团公司第十四研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!