并联双货位操作的移动机器人穿越的智能仓库
本发明涉及仓储物流与分拣配货的运输设备,尤其是一种并联双货位操作的移动机器人穿越的智能仓库。
背景技术:
1、在企业应用场景,绝大部分企业都是对生产的产品进行大批量仓储,部分企业还对生产原材料进行大批量仓储;实际应用场景中,也有很多企业对工具、外购件、自制件(半成品)、装配成品有一体化仓库需求;工况上,对工具、外购件、自制件(半成品)和存入装配成品频繁地存取,因此针对自动化立体仓库的整体架构进行改造,尤其需要克服巷道进出端口的瓶颈现象。
2、随着电子商务的发展,货品的高效配送也越来越重要。现在电商拣货流程包括:①非破坏性的打开物流箱,该物流箱为从供应商物流运输到电商处的纸箱,物流箱打开后对每件内包装货品读码、货品信息入数据库;②仓储:物流箱重新贴封条,进行备货仓储;③理货:再次拆封物流箱,将货品放入超市货架;④拣货(又称配货):在各超市货架处(人工拖行拣货车或智能小车自行)、人工按订单取下货品、读码、拣到内部使用的订单周转箱里;⑤包装:读码校验,将订单周转箱内的一个订单的所有拼货、发票装入小纸箱或塑料袋等外包装,贴上快递单;⑥分拣:按不同线路或各个快递公司装进塑料周转箱或编织袋;⑦配车:将塑料周转箱或编织袋按照线路配到运输车辆上。
3、上述现有的拣货流程中,需要多次封箱、开箱的操作,操作流程繁琐,实施效率低;另一方面,拣货过程类似超市购物,需要人工拖行拣货车或智能小车自行、寻找到货品位置、人工从超市货架上拿取订单中的货品,拣货效率低。
4、为了解决纸箱多次封箱开箱操作、从超市货架上拣货等操作流程造成的拣货效率低、以及超市货架占用空间大的问题,业界提出消除超市货架为基础的新模式:采用瓦楞纸箱远程运输、入库开箱、倒入库内周转箱存放或瓦楞纸箱仓储、并周转箱或瓦楞纸箱直接输送到拣货工位的方式,这种新方式是仓储的后端拣货模式。电商的后端拣货模式,涉及的自动化立体仓库均带有仓储与拣货(配货)一体化功能,从而消除了瓦楞纸箱仓储后再拆包、手工放置货品在超市货架上、以及顶升移动机器人将超市货架送至配货人员处等流程。
5、在前述企业一体化仓库、电商仓储与拣货综合仓库的应用场景,不同于一件瓦楞纸箱只存储一次的“一进一出”常规方式,即多个纸箱码垛在托盘上进行仓储,特征是库位大而分散;而是“n进n出”新方式,即按照企业车间零散取货需求、或者按照货品订单次数,频繁地被存取的状况,单个纸箱放在托盘上或货物装进周转箱进行仓储,特征是库位小而密集,因此也需要对自动化立体仓库的整体架构进行改造,尤其需要克服巷道进出端口的瓶颈现象,以提高吞吐效率、并降低堆垛机移动的能耗。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种结构合理的并联双货位操作的移动机器人穿越的智能仓库,从而有效的解决了现有技术中巷道进出端口的瓶颈现象,大大提高了吞吐效率与降低了堆垛机移动的能耗。
2、本发明所采用的技术方案如下:
3、一种并联双货位操作的移动机器人穿越的智能仓库,包括地板移动机器人、货架、双货位堆垛机、支撑堆垛机、地轨、地板通道、输送线、天轨、地面移动机器人和角度校正装置;
4、巷道的一端或二端设有进出库的输送线,输送线与双货位堆垛机、支撑堆垛机交接货物,所述货物包括满足存取前提下的箱型、或者仓库托盘和码垛在仓库托盘上大小箱子、袋子的操作单元;
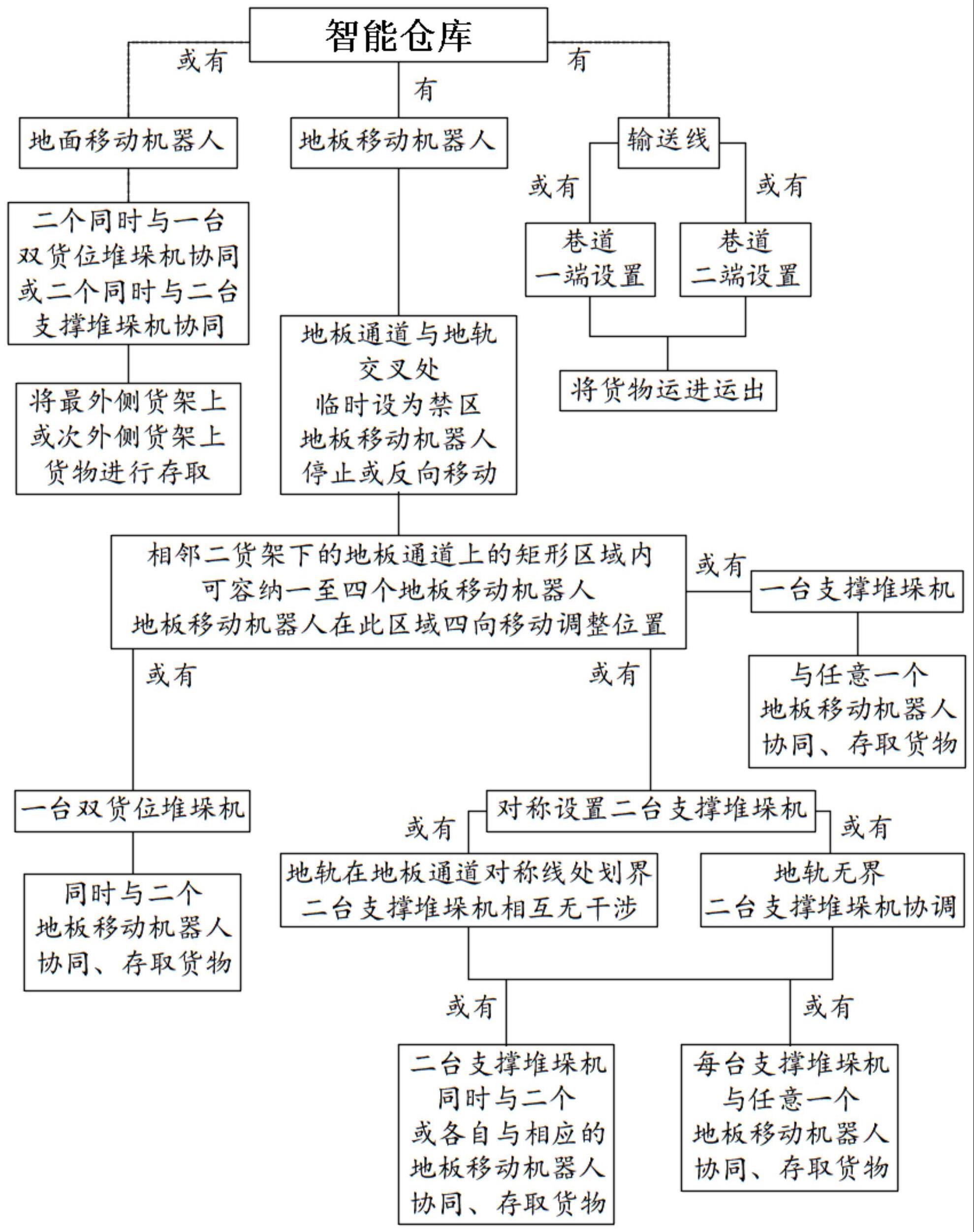
5、每条巷道设置一台双货位堆垛机、或对称布设置二台支撑堆垛机、或设置一台支撑堆垛机,或者根据所述货物进出数量、频率与库存货位,采用上述三种设置中任意二种设置、三种设置混合使用;地轨、天轨为双货位堆垛机、支撑堆垛机提供导向;
6、设置地板移动机器人,垂直于地轨的货架下铺设有等高于地轨的、供载货的地板移动机器人行驶的地板通道,地板通道的宽度与高度满足二个载货的地板移动机器人行驶,地板通道上行驶的地板移动机器人需越过地轨;
7、配置地面移动机器人,在垂直于地轨方向的、最外侧的货架下地面上行驶,无法越过地轨;最外侧的货架或次外侧的货架上的所述货物,经最外侧巷道里的双货位堆垛机、支撑堆垛机,由地面移动机器人直接运进运出;
8、一台支撑堆垛机与一个地板移动机器人、一个地面移动机器人进行交取所述货物;而并联双货位操作在于:巷道里的一台双货位堆垛机同时与二个地板移动机器人交取所述货物,或同时与二个地面移动机器人交取所述货物;巷道里对称设置的二台支撑堆垛机以地板通道中间为分界线,各自限定在自己的区域内工作,支撑堆垛机的结构设计,使得二台支撑堆垛机同时与二个地板移动机器人交取所述货物而不相互干涉,或同时与二个地面移动机器人交取所述货物而不相互干涉;
9、各巷道里地板通道临时设为禁区,是以双货位堆垛机、支撑堆垛机通行优先为原则、以经过最少地轨数目为优选方向而进退出库;相邻二条货架下的地板通道上的矩形区域,所述矩形区域还包括巷道里不影响双货位堆垛机、支撑堆垛机移动的区域,所述矩形区域容纳一至四个地板移动机器人,地板移动机器人在所述矩形区域四向移动调整位置;
10、同时还设有地板移动机器人、地面移动机器人的角度校正装置。
11、作为上述技术方案的进一步改进:
12、双货位堆垛机包括:第一载货台、第一双货叉组件、第一下横梁、第一驱动源、第一主动齿轮、第一从动齿轮、第一挂壁轴承、第一滚轮驱动轴一体件、第一导轮轴一体件、第一带座轴承、第一滚轮从动轴一体件、第一上导轮、第一门式导柱、第一缆绳卷筒部件和激光测距装置;
13、激光测距装置设置在第一下横梁前端外部,第一门式导柱固定在第一下横梁上,在第一门式导柱的二侧导柱导向下,第一载货台靠第一缆绳卷筒部件缆绳牵引经而上下运动,第一载货台上装有二个第一双货叉组件,第一双货叉组件为双向收缩货叉;第一下横梁上一端下部设有第一驱动源,经第一主动齿轮与第一从动齿轮啮合传递动力,第一从动齿轮固定在第一滚轮驱动轴一体件上,第一滚轮驱动轴一体件两端靠二个第一挂壁轴承支撑在第一下横梁上;第一下横梁上另一端下部也设有第一滚轮从动轴一体件,第一滚轮从动轴一体件两端靠二个第一挂壁轴承支撑在第一下横梁上;第一下横梁移动方向二个端面上各设有一对第一导轮轴一体件,每个第一导轮轴一体件靠二个第一带座轴承固定在第一下横梁移动方向的端面上;第一门式导柱上也设有二对第一上导轮,每对第一上导轮在天轨的槽中导向;双货位堆垛机靠第一滚轮驱动轴一体件、第一滚轮从动轴一体件支撑在地轨的上面,靠二对第一导轮轴一体件在地轨的侧面导向,并靠二对第一上导轮在天轨上导向,在第一驱动源驱动下沿巷道行驶。
14、所述支撑堆垛机包括:第二载货台、第二双货叉组件、第二下横梁、第二驱动源、第二主动齿轮、第二从动齿轮、第二挂壁轴承、第二滚轮驱动轴一体件、第二导轮轴一体件、第二带座轴承、第二滚轮从动轴一体件、第二上导轮、缆绳导轮组件、第二导柱、第二缆绳卷筒部件、激光测距装置;
15、激光测距装置设置在第二下横梁后端外部,第二导柱固定在第二下横梁上,在第二导柱的导向下,第二载货台靠第二缆绳卷筒部件牵引缆绳,经缆绳导轮组件导引而上下运动,第二载货台上装有一个第二双货叉组件,第二双货叉组件为双向收缩货叉;第二下横梁上一端下部设有第二驱动源,经第二主动齿轮与第二从动齿轮啮合传递动力,第二从动齿轮固定在第二滚轮驱动轴一体件上,第二滚轮驱动轴一体件两端靠二个第二挂壁轴承支撑在第二下横梁上;第二下横梁上另一端下部也设有第二滚轮从动轴一体件,第二滚轮从动轴一体件两端靠二个第二挂壁轴承支撑在第二下横梁上;第二下横梁移动方向二个端面上各设有一对第二导轮轴一体件,二个第二导轮轴一体件靠二个第二带座轴承固定在第二下横梁移动方向的端面上,另二个第二导轮轴一体件靠二个第二带座轴承固定在第二下横梁内部;第二导柱上也设有二对第二上导轮,每对第二上导轮在天轨的槽中导向;支撑堆垛机靠第二滚轮驱动轴一体件、第二滚轮从动轴一体件支撑在地轨的上面,靠二对第二导轮轴一体件在地轨的侧面导向,并靠二对第二上导轮在天轨上导向,在第二驱动源驱动下沿巷道行驶。
16、第一滚轮驱动轴一体件、第一导轮轴一体件、第一滚轮从动轴一体件、第二滚轮驱动轴一体件、第二导轮轴一体件和第二滚轮从动轴一体件均为球墨铸铁材料。
17、所述地板移动机器人基本是载货驶进、载货驶出,最好不空载进出库;
18、地板移动机器人、地面移动机器人与双货位堆垛机、支撑堆垛机的协同模式交取所述货物;
19、协同模式具体为:地板移动机器人、地面移动机器人等候或适应双货位堆垛机、支撑堆垛机原则,双货位堆垛机、支撑堆垛机上的货叉,直接从地板移动机器人、地面移动机器人上交取所述货物;在所述矩形区域、在地板通道的横向尺寸范围内,地板移动机器人微移动、精确定位双货位堆垛机、支撑堆垛机。
20、地板移动机器人是四向移动的顶部升降式移动机器人,地板移动机器人底盘在平行于巷道方向上是二对车轮,且在垂直于巷道方向上有四对车轮,二对从动轮相邻且转速一致,二对主动轮相邻且转速一致,从而在地板通道上无阻碍地越过地轨;
21、可选,带有二套顶升的宽体地板移动机器人,所述宽体地板移动机器人与双货位堆垛机同时交取所述二件所述货物后再进出库,或者所述宽体地板移动机器人同时与二台对称设置支撑堆垛机交取所述二件所述货物后再进出库,或者所述宽体地板移动机器人分别与一台对称设置支撑堆垛机交取所述一件所述货物、载满二件所述货物后再进出库;
22、地面移动机器人的顶升操作的初始高度及行程与地板移动机器人相同,无需越过地轨。
23、地板移动机器人、地面移动机器人带有前后方向、左右方向光电测量模块和/或超声波测距装置,判断在地板通道、上所处位置,地板移动机器人之间或地面移动机器人之间的距离,以及地板移动机器人微移动、精确定位双货位堆垛机、支撑堆垛机的检测。
24、双货位堆垛机的前端、支撑堆垛机的后端安装激光测距装置,双货位堆垛机前端、支撑堆垛机后端激光测距其沿地轨方向的位置信息及速度信息,用于定位货架位置;
25、二台对称设置支撑堆垛机的应用场景下,二台支撑堆垛机的后端激光测距其相对置信息及速度信息,还用于二者之间的防碰撞检测与速度控制。
26、地板移动机器人、地面移动机器人接收双货位堆垛机前端、支撑堆垛机后端沿地轨行驶激光测距的位置信息及速度信息,并综合地板移动机器人、地面移动机器人前后方向光电测量模块和/或超声波测距装置的测量信息,按照控制策略越过地轨。
27、设有用于地板移动机器人、地面移动机器人垂直于地轨的角度校正装置,四向移动的地板移动机器人、地面移动机器人长时间运行后,会产生累积误差,通过沿竖直转动方式的进行角度校正。
28、本发明的有益效果如下:
29、本发明结构紧凑、合理,操作方便,通过地板移动机器人、双货位堆垛机、支撑堆垛机、地面移动机器人等部件和机构之间的互相配合工作,可以有效的克服巷道进出端口的瓶颈现象,以提高吞吐效率、并降低堆垛机移动的能耗。
30、同时,本发明还具备如下优点:
31、(1)不仅是输送线、而且是地板移动机器人和地面移动机器人,参与货物的输入输出,再由巷道里的一台双货位堆垛机或二台支撑堆垛机,存取于高脚货架,因此本发明克服了货物只能从巷道二端出入库的瓶颈,大大提高了仓库高入出库能力。
32、(2)地板移动机器人和地面移动机器人都是顶升式移动机器人,都是可移动的最低库位;一台双货位堆垛机或二台支撑堆垛机,与双向的输送线、地板移动机器人和地面移动机器人协同操作,智能仓库的柔性好、适应性强;对应企业用户,不仅作为装配成品的仓库,而且与工具库、原材料库、外购件库形成综合性仓库;对应电商用户,将货品的仓储与拣货的流程综合,消除了超市货架,减少存储面积、提高拣货效率。
33、(3)最外侧货架下的地面移动机器人,与一台双货位堆垛机或二台支撑堆垛机交取货物的地点,可以是最外侧货架任一个最下面的货位,优化得出巷道内货物的最佳交付位置,因此双货位堆垛机或支撑堆垛机在巷道里纵向移动的距离大为缩短,存取高效率。
34、(4)输送线位于货架的一端或二端,二端输送线配置下横穿货架的地板通道位于货架中间,一端输送线配置下横穿货架的地板通道设置在接近货架另一端,地板移动机器人与双货位堆垛机或二台支撑堆垛机交取货物,因此双货位堆垛机或支撑堆垛机在巷道里纵向移动的距离大为缩短,存取高效率。
35、(5)与顶升移动机器人交取货物时,双货位堆垛机或二台支撑堆垛机的升降轿厢及货叉不上下运动,而是地板移动机器人和地面移动机器人的顶升平台或顶升支撑条上下运动,从而节能高效、控制精度高。
36、(6)本发明可以作为工具、外购件、自制件、装配成品的企业一体化仓库,还适合电商仓储与拣货流程的整合。
- 还没有人留言评论。精彩留言会获得点赞!