一种港口抓料机自动卸货的方法、装置、电子设备及介质与流程
本发明涉及港口运输领域,尤其涉及一种港口抓料机自动卸货的方法、装置、电子设备及介质。
背景技术:
1、随着人们废料再利用的需求逐渐上升,中国废料回收企业的产量持续增长,同时散料回收再利用也已经成为企业降本增效的手段之一。由于海运和江运运输成本较低、运输方便快捷、运输船载货量多等因素,在进行散料运输时,常常利用运输船将散料运送至港口,再利用抓料机将运输船中的散料进行卸货,因此利用运输船运输散料成为目前最佳选择。但这对港口散料装卸环节带来了一系列挑战:一方面,因企业控制成本的原因,通常选用不同的民用运输船进行运输,使得作业效率降低;另一方面,在作业过程中,需要人员对抓料机和船中的散料情况进行监控作业,增加了人力成本,人员在地面进行辅助作业时,存在安全隐患。
2、因此,如何提高港口抓料机的工作效率且降低成本是目前亟需解决的技术问题。
技术实现思路
1、鉴于以上所述现有技术的缺点,本发明提供一种港口抓料机自动卸货的方法、装置、电子设备及介质,以解决上述技术问题。
2、为实现上述目的及其他相关目的,本申请提供的技术方案如下。
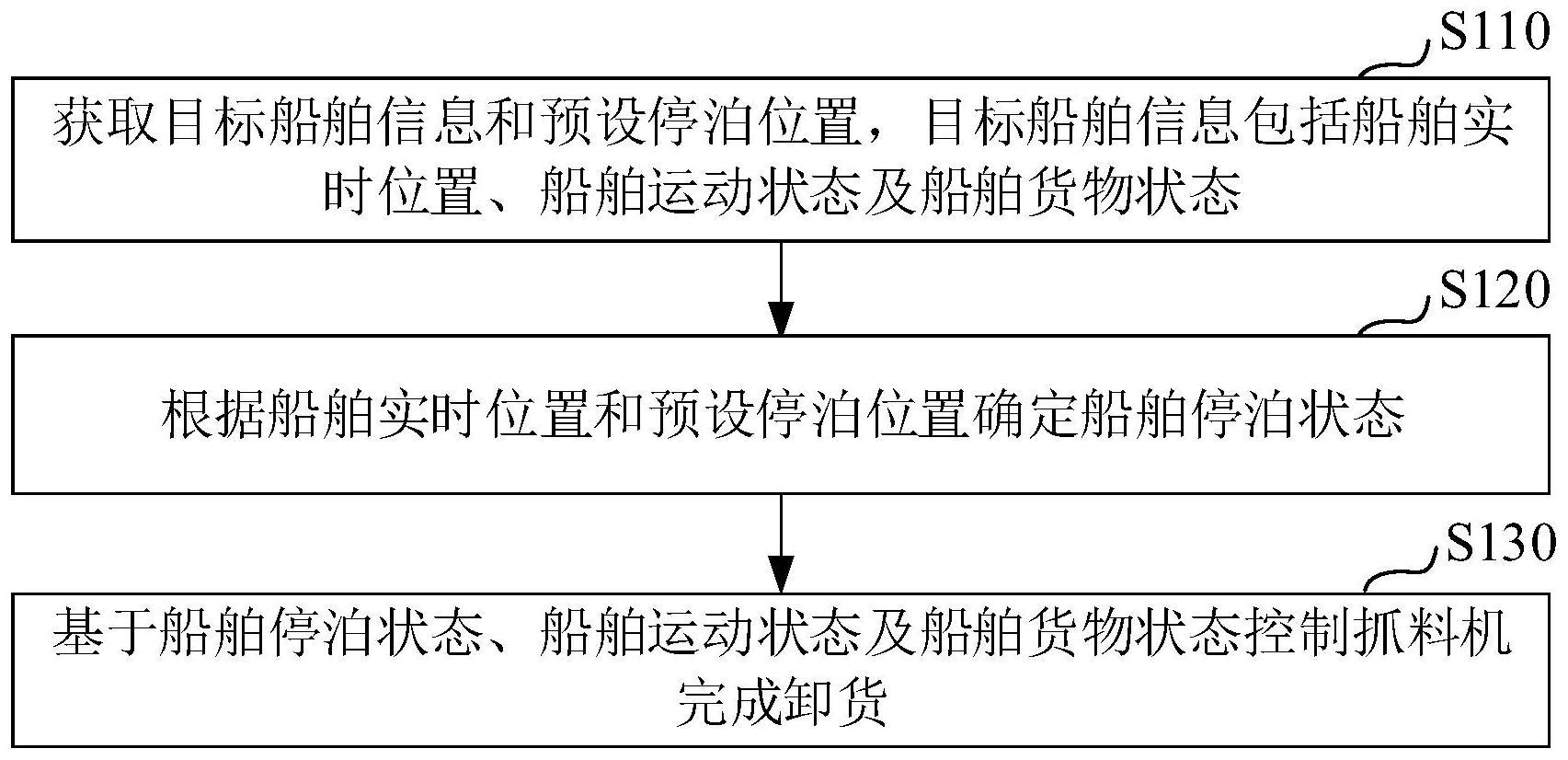
3、本发明提供一种港口抓料机自动卸货的方法,包括:获取目标船舶信息和预设停泊位置,所述目标船舶信息包括船舶实时位置、船舶运动状态及船舶货物状态;根据所述船舶实时位置和所述预设停泊位置确定船舶停泊状态;基于船舶停泊状态、船舶运动状态及船舶货物状态控制抓料机完成卸货。
4、在本申请的实施例所提供的技术方案中,在获取目标船舶信息之前还包括:对所述抓料机发送启动信号;若所述抓料机启动异常,则记录所述抓料机的异常情况并发送维修指令;若所述抓料机正常启动,则正常获取所述目标船舶信息。
5、在本申请的实施例所提供的技术方案中,根据所述船舶实时位置和所述预设停泊位置确定船舶停泊状态的步骤,包括:当所述船舶实时位置在所述预设停泊位置范围之外时,确定所述船舶停泊状态为未停泊;当所述船舶实时位置在所述预设停泊位置范围内时,确定所述船舶停泊状态为指定停泊。
6、在本申请的实施例所提供的技术方案中,基于船舶停泊状态、船舶运动状态及船舶货物状态对抓料机控制抓料机完成卸货的步骤,包括:当船舶停泊状态为指定停泊且所述船舶运动状态为运动,根据船舶运动方向控制所述抓料机卸货;当船舶停泊状态为指定停泊且所述船舶的运动状态为静止,根据所述船舶货物状态控制所述抓料机卸货。
7、在本申请的实施例所提供的技术方案中,根据船舶运动方向控制所述抓料机卸货的步骤,包括:当所述船舶运动方向检测为向前运动,根据所述船舶货物状态控制所述抓料机进行卸货;当所述船舶运动方向检测为向后运动或无法识别运动方向,发送远程操作指令控制所述抓料机停止。
8、在本申请的实施例所提供的技术方案中,根据所述船舶货物状态控制所述抓料机进行卸货的步骤,包括:当所述船舶货物状态为有料,控制所述抓料机对目标船舶完成卸货;当所述船舶货物状态为无料,发送所述远程操作指令控制所述抓料机停止。
9、在本申请的实施例所提供的技术方案中,当所述船舶停泊状态为未停泊且所述抓料机移动,发送所述远程操作指令控制所述抓料机复位。
10、根据本申请实施例的另一个方面,提供港口抓料机自动卸货的装置,包括:采集模块,用于获取目标船舶信息和预设停泊位置,所述目标船舶信息包括船舶实时位置、船舶运动状态及船舶货物状态;停泊确认模块,用于根据所述船舶实时位置和所述预设停泊位置确定船舶停泊状态;自动控制模块,用于基于船舶停泊状态、船舶运动状态及船舶货物状态控制抓料机完成卸货。
11、根据本申请实施例的另一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如前所述的港口抓料机自动卸货的方法。
12、根据本申请实施例的另一个方面,提供一种计算机可读存储的介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如前所述的港口抓料机自动卸货的方法。
13、本申请提供一种港口抓料机自动卸货的方法、装置、电子设备及介质,该方法通过获取目标船舶信息和预设停泊位置,目标船舶信息包括船舶实时位置、船舶运动状态和船舶货物状态;通过对船舶实时位置和预设停泊位置进行比较,判断目标船舶的停泊状态;根据目标船舶的停泊状态、运动状态及货物状态控制抓料机完成卸货。本发明通过目标船舶的实时位置和预设停泊位置来确定目标船舶的位置,从而反馈目标船舶是否处于预备卸货状态,实现对目标船舶位置的自动判断,提高工作效率,通过监控目标船舶的停泊状态、运动状态及货物状态对抓料机进行自动卸货,不再需要人工对目标船舶的运动状态和货物进行认为判断,减少人工操作的繁琐程序;另外,当控制抓料机出现异常时,发送远程操作指令控制抓料机进行停止或复位,提高抓料机的工作安全性,不仅提高了抓料机的效率,降低人工成本的情况下,还最大限度的控制抓料机。
技术特征:
1.一种港口抓料机自动卸货的方法,其特征在于,包括:
2.根据权利要求1所述的港口抓料机自动卸货的方法,其特征在于,在获取目标船舶信息之前还包括:
3.根据权利要求2所述的港口抓料机自动卸货的方法,其特征在于,根据所述船舶实时位置和所述预设停泊位置确定船舶停泊状态的步骤,包括:
4.根据权利要求3所述的港口抓料机自动卸货的方法,其特征在于,基于船舶停泊状态、船舶运动状态及船舶货物状态控制所述抓料机完成卸货的步骤,包括:
5.根据权利要求4所述的港口抓料机自动卸货的方法,其特征在于,根据船舶运动方向控制所述抓料机卸货的步骤,包括:
6.根据权利要求5所述的港口抓料机自动卸货的方法,其特征在于,根据所述船舶货物状态控制所述抓料机进行卸货的步骤,包括:
7.根据权利要求5所述的港口抓料机自动卸货的方法,其特征在于,当所述船舶停泊状态为未停泊且所述抓料机移动,发送所述远程操作指令控制所述抓料机复位。
8.一种港口抓料机自动卸货的装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行权利要求1至7中任一项所述的港口抓料机自动卸货的方法。
技术总结
本申请提供一种港口抓料机自动卸货的方法、装置、电子设备及介质,该方法通过获取目标船舶信息和预设停泊位置,目标船舶信息包括船舶实时位置、船舶运动状态和船舶货物状态;通过船舶实时位置和预设停泊位置确定船舶停泊状态;根据目标船舶的停泊状态、运动状态及货物状态控制抓料机完成卸货。本发明通过监控目标船舶的实时位置,反馈目标船舶是否处于预备卸货状态,实现对目标船舶位置的自动判断,提高工作效率,通过目标船舶的停泊状态、运动状态及货物状态对抓料机进行自动卸货,减少人工操作的繁琐程序,降低人工成本,从而提高抓料机的工作效率。
技术研发人员:何立,文重翰,童建林,石清庆,林启勇
受保护的技术使用者:中冶赛迪技术研究中心有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!