一种AGV叉车的叉臂控制方法、装置、设备及介质与流程
本技术涉及运输设备领域,具体而言,涉及一种agv叉车的叉臂控制方法、装置、设备及介质。
背景技术:
1、agv(automated guided vehicle),即可自动导航的小车,主要用于搬运货物。agv叉车可通过叉臂升降叉取货物,但由于叉臂使用的是液压系统,直接输出支撑力,在叉臂处于上升状态、下降状态或不同负载状态下时,设置相同的控制输出值会导致叉臂的实际速度差别很大,且有明显波动。并且控制输出值与叉臂的实际升降速度不是简单的线性关系,容易导致叉臂超调,运动超过目标位置,因此需要对叉臂进行控制。
2、目前,现有的叉臂控制方法往往直接使用pid进行控制,但容易出现速度来回震荡的情况,并且当叉取的货物重量不同时,叉臂的实际速度差异大,直接使用pid调节较慢。因此,如何提高叉臂控制的精准度成为了不容小觑的技术问题。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种agv叉车的叉臂控制方法、装置、设备及介质,使用符合叉臂当前状态的目标转换函数计算目标控制输出量,可适应不同负载下控制输出量的差异问题,适应性更好。并基于目标速度值与当前速度值之间的差值对目标控制输出量进行细微调节,使叉臂更加精准的达到目标速度值,使对于叉臂的速度控制更加精准,实现对叉臂升降速度的精准控制。
2、第一方面,本技术实施例提供了一种agv叉车的叉臂控制方法,所述叉臂控制方法包括:
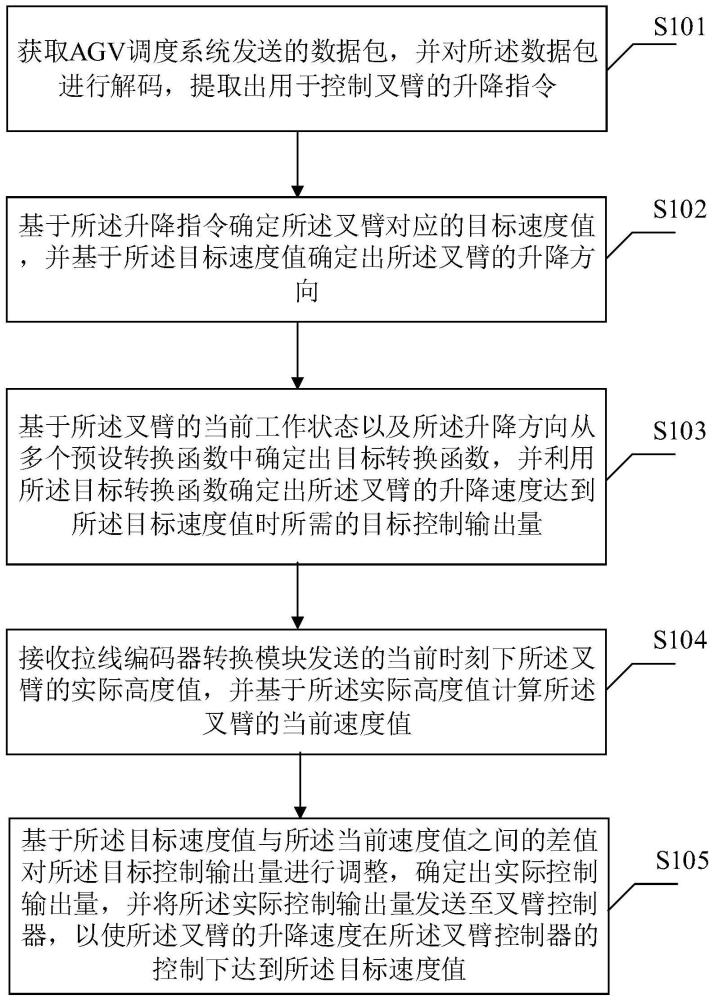
3、获取agv调度系统发送的数据包,并对所述数据包进行解码,提取出用于控制叉臂的升降指令;
4、基于所述升降指令确定所述叉臂对应的目标速度值,并基于所述目标速度值确定出所述叉臂的升降方向;
5、基于所述叉臂的当前工作状态以及所述升降方向从多个预设转换函数中确定出目标转换函数,并利用所述目标转换函数确定出所述叉臂的升降速度达到所述目标速度值时所需的目标控制输出量;
6、接收拉线编码器转换模块发送的当前时刻下所述叉臂的实际高度值,并基于所述实际高度值计算所述叉臂的当前速度值;
7、基于所述目标速度值与所述当前速度值之间的差值对所述目标控制输出量进行调整,确定出实际控制输出量,并将所述实际控制输出量发送至叉臂控制器,以使所述叉臂的升降速度在所述叉臂控制器的控制下达到所述目标速度值。
8、进一步的,通过以下步骤确定出多个所述预设转换函数:
9、在所述叉臂处于空载上升状态时,向所述叉臂控制器发送不同的预设控制输出量,并记录所述叉臂在每个预设控制输出量下所述叉臂的实际上升速度;
10、基于每个预设控制输出量以及每个预设控制输出量对应的实际上升速度进行函数拟合,得到空载上升状态下的预设转换函数;
11、在所述叉臂处于空载下降状态时,向所述叉臂控制器发送不同的预设控制输出量,并记录所述叉臂在每个预设控制输出量下所述叉臂的第一实际下降速度;
12、基于每个预设控制输出量以及每个预设控制输出量对应的第一实际下降速度进行函数拟合,得到空载下降状态下的预设转换函数;
13、在所述叉臂处于负载下降状态时,向所述叉臂控制器发送不同的预设控制输出量,并记录所述叉臂在每个预设控制输出量下所述叉臂的第二实际下降速度;
14、基于每个预设控制输出量以及每个预设控制输出量对应的第二实际下降速度进行函数拟合,得到负载下降状态下的预设转换函数。
15、进一步的,所述基于所述叉臂的当前工作状态以及所述升降方向从多个预设转换函数中确定出目标转换函数,包括:
16、当所述叉臂的当前工作状态为空载状态,且所述升降方向为上升方向时,将所述空载上升状态下的预设转换函数确定为所述目标转换函数;
17、当所述叉臂的当前工作状态为空载状态,且所述升降方向为下降方向时,将所述空载下降状态下的预设转换函数确定为所述目标转换函数;
18、当所述叉臂的当前工作状态为负载状态,且所述升降方向为下降方向时,将所述负载下降状态下的预设转换函数确定为所述目标转换函数。
19、进一步的,所述基于所述实际高度值计算所述叉臂的当前速度值,包括:
20、获取上一时刻所述拉线编码器转换模块发送的所述叉臂的历史高度值;
21、基于所述当前时刻和所述上一时刻确定时间间隔;
22、基于所述实际高度值、所述历史高度值和所述时间间隔计算所述当前速度值。
23、进一步的,所述基于所述目标速度值与所述当前速度值之间的差值对所述目标控制输出量进行调整,确定出实际控制输出量,包括:
24、基于所述目标速度值与所述当前速度值之间的差值,利用增量式pid调节算法确定出增量值;
25、将所述增量值与所述目标控制输出量之和确定为所述实际控制输出量。
26、进一步的,在所述获取agv调度系统发送的数据包之后,所述叉臂控制方法还包括:
27、根据获取到的所述数据包计算校验值,并基于所述校验值验证所述数据包是否正确;
28、若是,则执行所述对所述数据包进行解码的步骤;
29、若否,则丢弃所述数据包。
30、第二方面,本技术实施例还提供了一种agv叉车的叉臂控制装置,所述叉臂控制装置包括:
31、升降指令确定模块,用于获取agv调度系统发送的数据包,并对所述数据包进行解码,提取出用于控制叉臂的升降指令;
32、目标速度值确定模块,用于基于所述升降指令确定所述叉臂对应的目标速度值,并基于所述目标速度值确定出所述叉臂的升降方向;
33、目标控制输出量计算模块,用于基于所述叉臂的当前工作状态以及所述升降方向从多个预设转换函数中确定出目标转换函数,并利用所述目标转换函数确定出所述叉臂的升降速度达到所述目标速度值时所需的目标控制输出量;
34、当前速度值计算模块,用于接收拉线编码器转换模块发送的当前时刻下所述叉臂的实际高度值,并基于所述实际高度值计算所述叉臂的当前速度值;
35、速度控制模块,用于基于所述目标速度值与所述当前速度值之间的差值对所述目标控制输出量进行调整,确定出实际控制输出量,并将所述实际控制输出量发送至叉臂控制器,以使所述叉臂的升降速度在所述叉臂控制器的控制下达到所述目标速度值。
36、进一步的,所述叉臂控制装置还包括函数确定模块,所述函数确定模块用于通过以下步骤确定出多个所述预设转换函数:
37、在所述叉臂处于空载上升状态时,向所述叉臂控制器发送不同的预设控制输出量,并记录所述叉臂在每个预设控制输出量下所述叉臂的实际上升速度;
38、基于每个预设控制输出量以及每个预设控制输出量对应的实际上升速度进行函数拟合,得到空载上升状态下的预设转换函数;
39、在所述叉臂处于空载下降状态时,向所述叉臂控制器发送不同的预设控制输出量,并记录所述叉臂在每个预设控制输出量下所述叉臂的第一实际下降速度;
40、基于每个预设控制输出量以及每个预设控制输出量对应的第一实际下降速度进行函数拟合,得到空载下降状态下的预设转换函数;
41、在所述叉臂处于负载下降状态时,向所述叉臂控制器发送不同的预设控制输出量,并记录所述叉臂在每个预设控制输出量下所述叉臂的第二实际下降速度;
42、基于每个预设控制输出量以及每个预设控制输出量对应的第二实际下降速度进行函数拟合,得到负载下降状态下的预设转换函数。
43、第三方面,本技术实施例还提供一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行如上述的agv叉车的叉臂控制方法的步骤。
44、第四方面,本技术实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行如上述的agv叉车的叉臂控制方法的步骤。
45、本技术实施例提供的一种agv叉车的叉臂控制方法、装置、设备及介质,首先,获取agv调度系统发送的数据包,并对所述数据包进行解码,提取出用于控制叉臂的升降指令;然后,基于所述升降指令确定所述叉臂对应的目标速度值,并基于所述目标速度值确定出所述叉臂的升降方向;基于所述叉臂的当前工作状态以及所述升降方向从多个预设转换函数中确定出目标转换函数,并利用所述目标转换函数确定出所述叉臂的升降速度达到所述目标速度值时所需的目标控制输出量;接收拉线编码器转换模块发送的当前时刻下所述叉臂的实际高度值,并基于所述实际高度值计算所述叉臂的当前速度值;最后,基于所述目标速度值与所述当前速度值之间的差值对所述目标控制输出量进行调整,确定出实际控制输出量,并将所述实际控制输出量发送至叉臂控制器,以使所述叉臂的升降速度在所述叉臂控制器的控制下达到所述目标速度值。
46、本技术使用符合叉臂当前状态的目标转换函数计算目标控制输出量,可适应不同负载下控制输出量的差异问题,适应性更好。并基于目标速度值与当前速度值之间的差值对目标控制输出量进行细微调节,使叉臂更加精准的达到目标速度值,使对于叉臂的速度控制更加精准,实现对叉臂升降速度的精准控制。解决了agv叉臂的液压泵或比例阀输出控制量与叉臂的实际速度呈非线性关系的问题。
47、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!