一种起重机智能快速吊运标的物运动姿态监测方法及系统与流程
本发明涉及起重机,具体涉及一种起重机智能快速吊运标的物运动姿态监测方法及系统。
背景技术:
1、对于电力设备,通常采用起重机对其进行吊运,在吊运过程中,由于起重机操作人员无法看到现场的吊运情况,只能与现场人员通过手持对讲机的方式进行远距离沟通,根据现场人员的描述了解吊运情况,再通过控制液压杆和悬臂的伸缩长度,将电力设备吊运到所需的位置。
2、然而现有技术中的操作方式,需要现场人员与起重机操作人员通过手持对讲机远距离进行多次沟通,逐步调整操作,需要耗费大量的时间,造成过高的人力成本,而且在操作过程中,容易发生甩动,导致电力设备与其它物体碰撞而损坏。
技术实现思路
1、本发明的目的是为了提供一种起重机智能快速吊运标的物运动姿态监测方法及系统,能够提升起重机吊运标的物的效率。
2、为达到上述目的,本发明通过以下技术方案实现:
3、一种起重机智能快速吊运标的物运动姿态监测方法,包括以下步骤:
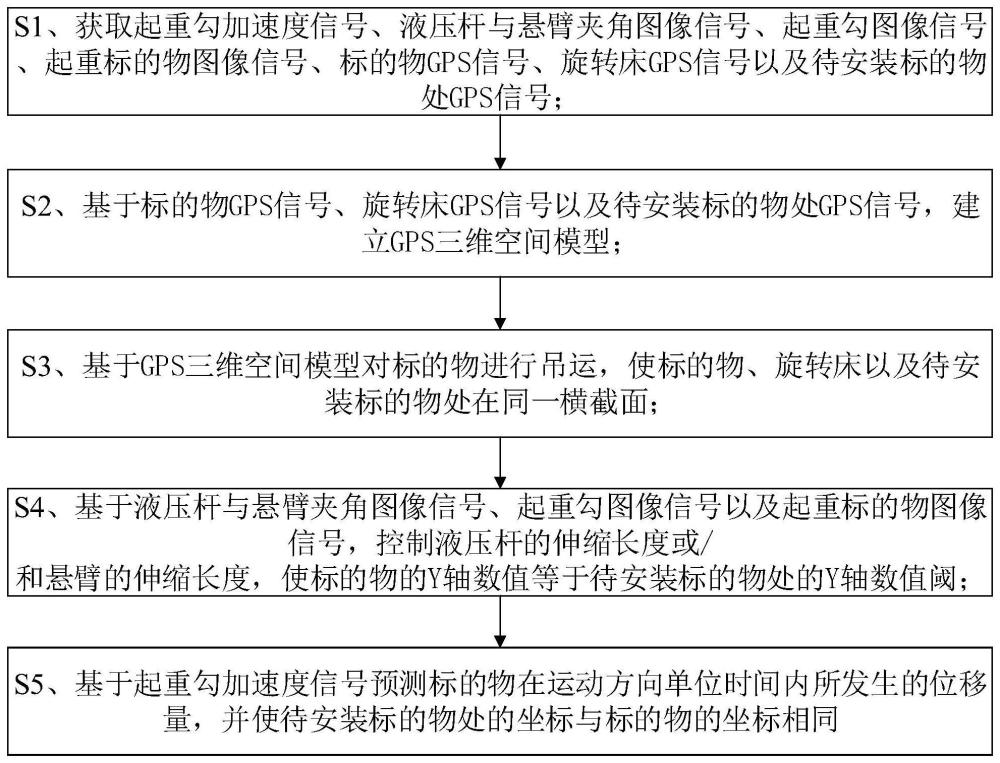
4、s1、获取起重勾加速度信号、液压杆与悬臂夹角图像信号、起重勾图像信号、起重标的物图像信号、标的物gps信号、旋转床gps信号以及待安装标的物处gps信号;
5、s2、基于标的物gps信号、旋转床gps信号以及待安装标的物处gps信号,建立gps三维空间模型;
6、s3、基于gps三维空间模型对标的物进行吊运,使标的物、旋转床以及待安装标的物处在同一横截面;
7、s4、基于液压杆与悬臂夹角图像信号、起重勾图像信号以及起重标的物图像信号,控制液压杆的伸缩长度或/和悬臂的伸缩长度,使标的物的y轴数值等于待安装标的物处的y轴数值阈值;
8、s5、基于起重勾加速度信号预测标的物在运动方向单位时间内所发生的位移量,并使待安装标的物处的坐标与标的物的坐标相同。
9、优选地,所述步骤s1包括:
10、将加速度传感器安装在起重勾,以在吊运过程中获取起重勾加速度信号;
11、第一摄像模块获取液压杆与悬臂夹角图像信号;第二摄像模块获取起重勾图像信号和起重标的物图像信号;
12、在标的物上安装第一gps定位器,以获取标的物gps信号;在旋转床的旋转中心处安装第二gps定位器,以获取旋转床gps信号;在待安装标的物处安装第三gps定位器,以获取待安装标的物处gps信号。
13、优选地,所述步骤s2包括:以旋转床为基准位置,垂直旋转床正上方的方向为正z轴,以旋转床指向待安装标的物处方向为正y轴,与正y轴垂直方向的右部分为正x轴,建立gps三维空间模型。
14、进一步地,所述步骤s3包括:基于gps三维空间模型对标的物进行吊运,使得标的物落在正y轴和正x轴构成的平面上。
15、优选地,所述步骤s4包括:基于液压杆与悬臂夹角图像信号确定液压杆和悬臂之间所构成的夹角数值。
16、进一步地,所述基于液压杆与悬臂夹角图像信号确定液压杆和悬臂之间所构成的夹角数值,包括:
17、对液压杆与悬臂夹角图像信号进行图像信号去噪处理;
18、对图像信号去噪处理结果进行图像信号分割处理;
19、对图像信号分割处理结果进行液压杆特征和悬臂特征识别,并计算液压杆和悬臂之间所构成的夹角数值。
20、优选地,所述步骤s4包括:基于起重勾图像信号或/和起重标的物图像信号确定起重勾或/和起重标的物的摆动程度,控制液压杆或/和悬臂的伸缩速度。
21、进一步地,所述起重勾上设有若干不同颜色的等面积圆柱状区域,所述基于起重勾图像信号确定起重勾或/和起重标的物的摆动程度,包括:
22、根据起重勾上的不同的颜色面积之间的比及不同的颜色面积之间的比的变化速率,来判断起重勾或/和起重标的物的摆动程度。
23、优选地,所述步骤s5包括:控制液压杆的伸缩长度或/和悬臂的伸缩长度使得标的物落在标的物的坐标与待安装标的物处的坐标在z轴上的数值相等的位置处。
24、一种用于上述起重机智能快速吊运标的物运动姿态监测方法的运动姿态监测系统,所述起重机包括起重勾、液压杆、悬臂以及旋转床,包括:
25、信号获取单元,用于获取起重勾加速度信号、液压杆与悬臂夹角图像信号、起重勾图像信号、起重标的物图像信号、标的物gps信号、旋转床gps信号以及待安装标的物处gps信号;
26、建模单元,基于标的物gps信号、旋转床gps信号以及待安装标的物处gps信号,建立gps三维空间模型;
27、吊运单元,基于gps三维空间模型对标的物进行吊运,使标的物、旋转床以及待安装标的物处在同一横截面;
28、控制单元,基于液压杆与悬臂夹角图像信号、起重勾图像信号以及起重标的物图像信号,控制液压杆的伸缩长度或/和悬臂的伸缩长度,使标的物的y轴数值等于待安装标的物处的y轴数值阈值;
29、计算单元,基于起重勾加速度信号预测标的物在运动方向单位时间内所发生的位移量,并使待安装标的物处的坐标与标的物的坐标相同。
30、本发明具有以下有益效果:
31、本发明的一种起重机智能快速吊运标的物运动姿态监测方法及系统,通过标的物gps信号、旋转床gps信号、待安装标的物处gps信号建立gps三维空间模型;基于gps三维空间模型,对标的物进行吊运,使标的物、旋转床、待安装标的物处在同一横截面;控制液压杆的伸缩长度或/和悬臂的伸缩长度,使标的物的y轴数值等于待安装标的物处的y轴数值阈值;基于起重勾加速度信号预测标的物在运动方向单位时间内所发生的位移量,并使安装标的物处的坐标与标的物的坐标相同。
32、使用本发明能够快速安全精确完成标的物吊运,耗费时间少,人力成本低,相对于现有技术中通过手持对讲机远距离进行多次沟通,逐步调整操作的方式,能够大大提升起重机吊运标的物的效率。
技术特征:
1.一种起重机智能快速吊运标的物运动姿态监测方法,其特征在于,包括以下步骤:
2.如权利要求1所述的运动姿态监测方法,其特征在于,所述步骤s1包括:
3.如权利要求1所述的运动姿态监测方法,其特征在于,所述步骤s2包括:以旋转床为基准位置,垂直旋转床正上方的方向为正z轴,以旋转床指向待安装标的物处方向为正y轴,与正y轴垂直方向的右部分为正x轴,建立gps三维空间模型。
4.如权利要求3所述的运动姿态监测方法,其特征在于,所述步骤s3包括:基于gps三维空间模型对标的物进行吊运,使得标的物落在正y轴和正x轴构成的平面上。
5.如权利要求1所述的运动姿态监测方法,其特征在于,所述步骤s4包括:基于液压杆与悬臂夹角图像信号确定液压杆和悬臂之间所构成的夹角数值。
6.如权利要求5所述的运动姿态监测方法,其特征在于,所述基于液压杆与悬臂夹角图像信号确定液压杆和悬臂之间所构成的夹角数值,包括:
7.如权利要求1所述的运动姿态监测方法,其特征在于,所述步骤s4包括:基于起重勾图像信号或/和起重标的物图像信号确定起重勾或/和起重标的物的摆动程度,控制液压杆或/和悬臂的伸缩速度。
8.如权利要求7所述的运动姿态监测方法,其特征在于,所述起重勾上设有若干不同颜色的等面积圆柱状区域,所述基于起重勾图像信号确定起重勾或/和起重标的物的摆动程度,包括:
9.如权利要求1所述的运动姿态监测方法,其特征在于,所述步骤s5包括:控制液压杆的伸缩长度或/和悬臂的伸缩长度使得标的物落在标的物的坐标与待安装标的物处的坐标在z轴上的数值相等的位置处。
10.一种用于如权利要求1-9任一项所述起重机智能快速吊运标的物运动姿态监测方法的运动姿态监测系统,所述起重机包括起重勾、液压杆、悬臂以及旋转床,其特征在于,包括:
技术总结
本发明公开了一种起重机智能快速吊运标的物运动姿态监测方法及系统,方法包括:获取起重勾加速度信号、液压杆与悬臂夹角图像信号、起重勾图像信号、起重标的物图像信号、标的物GPS信号、旋转床GPS信号以及待安装标的物处GPS信号,建立GPS三维空间模型;基于GPS三维空间模型对标的物进行吊运;基于液压杆与悬臂夹角图像信号、起重勾图像信号以及起重标的物图像信号,控制液压杆的伸缩长度或/和悬臂的伸缩长度,使待安装标的物处的坐标与标的物的坐标相同。使用本发明能够快速安全精确完成标的物吊运,耗费时间少,人力成本低,相对于现有技术中通过手持对讲机远距离进行多次沟通,逐步调整操作的方式,能够大大提升起重机吊运标的物的效率。
技术研发人员:彭开宇,彭鹏,楼晓东,邵宇鹰,马鲁,顾天
受保护的技术使用者:国网上海市电力公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!