抓料机的轨迹规划方法、装置、电子设备及介质与流程
本技术涉及轨迹规划,具体涉及一种抓料机的轨迹规划方法、装置、电子设备及介质。
背景技术:
1、随着抓料机等工程机械的无人化研究开展,作业决策和环境感知能力的不断提高,对抓料机的运动轨迹多样性提出了更高的要求,这同时也对作业过程中的实际运动轨迹描述方法提出了新的要求。
2、抓料机能在多变化场景下高效率的进行作业的关键在于运动轨迹的平滑性和可调整性。然而在目前市场上通用的轨迹规划方法中,路径有折点,抓料机在运动的到折点附近时会出现速度降为零然后从另一个方向提升速度的情况。这样会导致作业的运行效率降低,尤其是在障碍物较多,路径曲折的情况下会出现抓料机走走停停的不连续作业情况,极大的加大了作业时间,降低了经济效应,同时速度不断的归零重启也会加大能源的耗费以及对机械部件的损耗。其次,用一条轨迹来描述整个抓料作业过程,极大程度的增加了轨迹的不可控性和复杂性。
技术实现思路
1、鉴于以上所述相关技术的缺点,本技术提供一种抓料机的轨迹规划方法、装置、电子设备及介质,以解决上述技术问题。
2、本技术提供的一种抓料机的轨迹规划方法,包括:
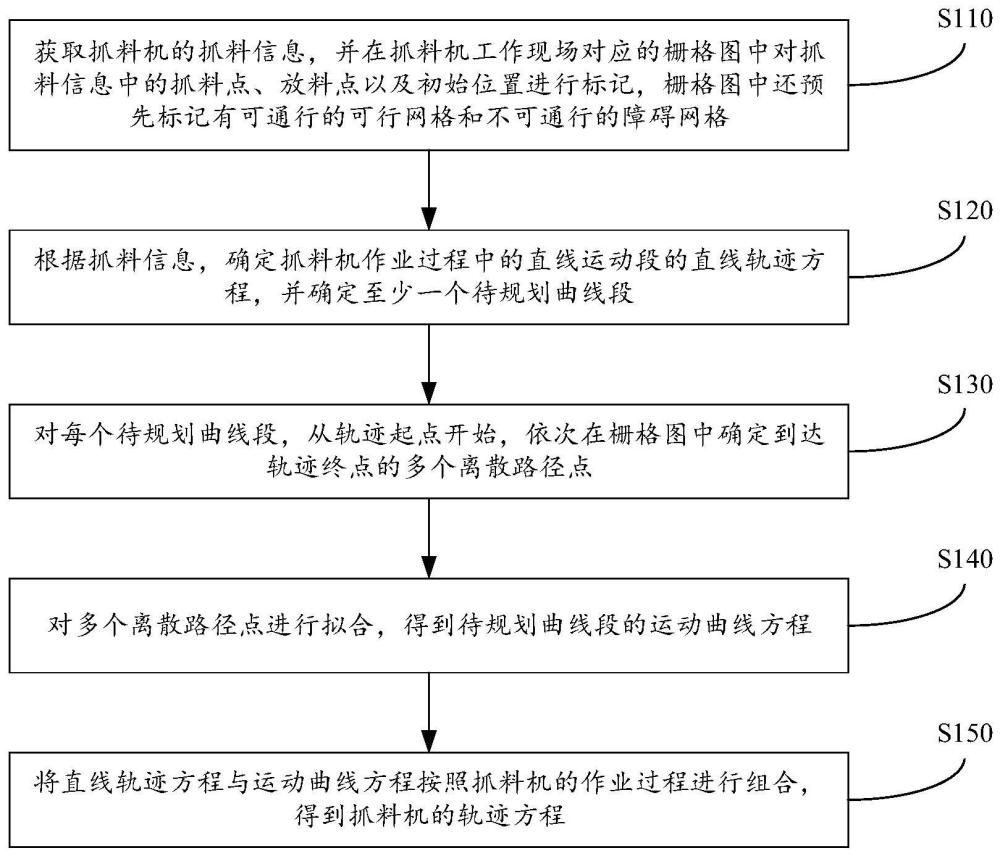
3、获取抓料机的抓料信息,并在抓料机工作现场对应的栅格图中对所述抓料信息中的抓料点、放料点以及初始位置进行标记,所述栅格图中还预先标记有可通行的可行网格和不可通行的障碍网格;
4、根据所述抓料信息,确定抓料机作业过程中的直线运动段的直线轨迹方程,并确定至少一个待规划曲线段,每个所述待规划曲线段包括轨迹起点和轨迹终点;
5、对每个所述待规划曲线段,从所述轨迹起点开始,依次在栅格图中确定到达轨迹终点的多个离散路径点;
6、对多个所述离散路径点进行拟合,得到待规划曲线段的运动曲线方程;
7、将所述直线轨迹方程与所述运动曲线方程按照抓料机的作业过程进行组合,得到所述抓料机的轨迹方程。
8、于本技术一实施例中,根据所述抓料信息,确定抓料机作业过程中的直线运动段的直线轨迹方程,并确定至少一个待规划曲线段,包括:
9、将初始位置到抓料点上方的开始抓取位置之间的路线确定为待规划曲线段将抓斗抓料阶段确定为直线运动段;
10、将开始抓取位置至放料点附近的开始放置位置之间的路线确定为待规划曲线段;
11、将抓斗放料阶段确定为直线运动段。
12、于本技术一实施例中,对每个所述待规划曲线段,从所述轨迹起点开始,依次在栅格图中确定到达轨迹终点的多个离散路径点,包括:
13、从轨迹起点所在的网格开始,分别计算所述轨迹起点到周围网格的第一距离和所述周围网格到轨迹终点的预估距离,所述周围网格为栅格图中的可行网格;
14、分别计算所述轨迹起点通过各周围网格后到达轨迹终点的总距离,所述总距离为所述第一距离与所述预估距离的和;
15、从周围网格中选出总距离最小的临点,作为目标临点;
16、以所述目标临点作为新的起始点,确定新的目标临点,重复执行,直至到达所述轨迹终点,输出从所述轨迹起点到所述轨迹终点的多个目标临点,并将多个目标临点确定为多个离散路径点。
17、于本技术一实施例中,对多个所述离散路径点进行拟合,得到待规划曲线段的运动曲线方程,包括:
18、对多个所述离散路径点进行b样条拟合,得到待规划曲线段的运动曲线方程。
19、于本技术一实施例中,将所述直线轨迹方程与所述运动曲线方程按照抓料机的作业过程进行组合,得到所述抓料机的轨迹方程之后,所述方法包括:
20、对所述轨迹方程按照预设时间间隔进行取值,得到多个离散的运动轨迹点;
21、对多个所述运动轨迹点进行防撞检测。
22、于本技术一实施例中,对多个所述运动轨迹点进行防撞检测之后,所述方法还包括:
23、若所述防撞检测通过,则抓料机以所述轨迹方程进行作业;
24、若所述防撞检测未通过,则调整运动曲线方程的参数,以使轨迹方程通过所述防撞检测。
25、为实现上述目的及其他相关目的,本技术提供一种抓料机的轨迹规划装置,包括:
26、数据获取模块,用于获取抓料机的抓料信息,并在抓料机工作现场对应的栅格图中对所述抓料信息中的抓料点、放料点以及初始位置进行标记,所述栅格图中还预先标记有可通行的可行网格和不可通行的障碍网格;
27、分段模块,用于根据所述抓料信息,确定抓料机作业过程中的直线运动段的直线轨迹方程,并确定至少一个待规划曲线段,每个所述待规划曲线段包括轨迹起点和轨迹终点;
28、第一轨迹规划模块,用于对每个所述待规划曲线段,从所述轨迹起点开始,依次在栅格图中确定到达轨迹终点的多个离散路径点;
29、第二轨迹规划模块,用于对多个所述离散路径点进行拟合,得到待规划曲线段的运动曲线方程;
30、第三轨迹规划模块,用于将所述直线轨迹方程与所述运动曲线方程按照抓料机的作业过程进行组合,得到所述抓料机的轨迹方程。
31、于本技术一实施例中,所述分段模块包括:
32、第一规划单元,用于将初始位置到抓料点上方的开始抓取位置之间的路线确定为待规划曲线段;
33、第二规划单元,用于将抓斗抓料阶段确定为直线运动段;
34、第三规划单元,用于将开始抓取位置至放料点附近的开始放置位置之间的路线确定为待规划曲线段;
35、第四规划单元,用于将抓斗放料阶段确定为直线运动段。
36、为实现上述目的及其他相关目的,本技术还提供一种电子设备,所述电子设备包括:
37、一个或多个处理器;
38、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如前所述的抓料机的轨迹规划方法。
39、为实现上述目的及其他相关目的,本技术还提供一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行如前所述的抓料机的轨迹规划方法。
40、如上所述,本技术提供的一种抓料机的轨迹规划方法、装置、电子设备及介质,具有以下有益效果:
41、本技术中的一种抓料机的轨迹规划方法,该方法通过获取抓料机的抓料信息,并根据抓料信息,确定抓料机作业过程中的直线运动段的直线轨迹方程,并确定至少一个待规划曲线段,对每个待规划曲线段,从轨迹起点开始,依次在栅格图中确定到达轨迹终点的多个离散路径点,并对多个离散路径点进行拟合,得到待规划曲线段的运动曲线方程,最后将直线轨迹方程与运动曲线方程按照抓料机的作业过程进行组合,得到抓料机的轨迹方程。通过确定多个离散路径点并进行拟合,可以避免轨迹中出现折点,进而避免抓料机在作业过程中出现速度将为零的情况,达到提高作业效率和经济效应的效果。其次,对抓料机的作业过程划分为直线运动段和待规划曲线段,使得轨迹方程可以较为准确的描述抓料机的整个作业过程。
42、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!