一种智能垃圾分类装置及方法
本发明涉及垃圾分类收集领域,特别涉及一种智能垃圾分类装置及方法。
背景技术:
1、垃圾在分类储存阶段属于公众的私有品,垃圾经公众分类投放后成为公众所在小区或社区的区域性公共资源,垃圾分类搬运到垃圾集中点或转运站后成为没有排除性的公共资源。从国内外各城市对生活垃圾分类的方法来看,大多都是根据垃圾的成分、产生量,结合本地垃圾的资源利用和处理方式等来进行分类的。
2、现有技术中,对于垃圾的处理方式是居民根据分类标准将垃圾扔进对应的垃圾桶内。
3、上述现有技术存在的缺陷是:在扔垃圾的过程中是由居民自发根据标准来进行分类,由于垃圾种类众多,居民不能够准确记住每种垃圾对应的类别,导致分类错误,将垃圾扔到错误的垃圾桶中。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种智能垃圾分类装置及方法。
2、本发明实施例提供一种智能垃圾分类装置及方法,包括:
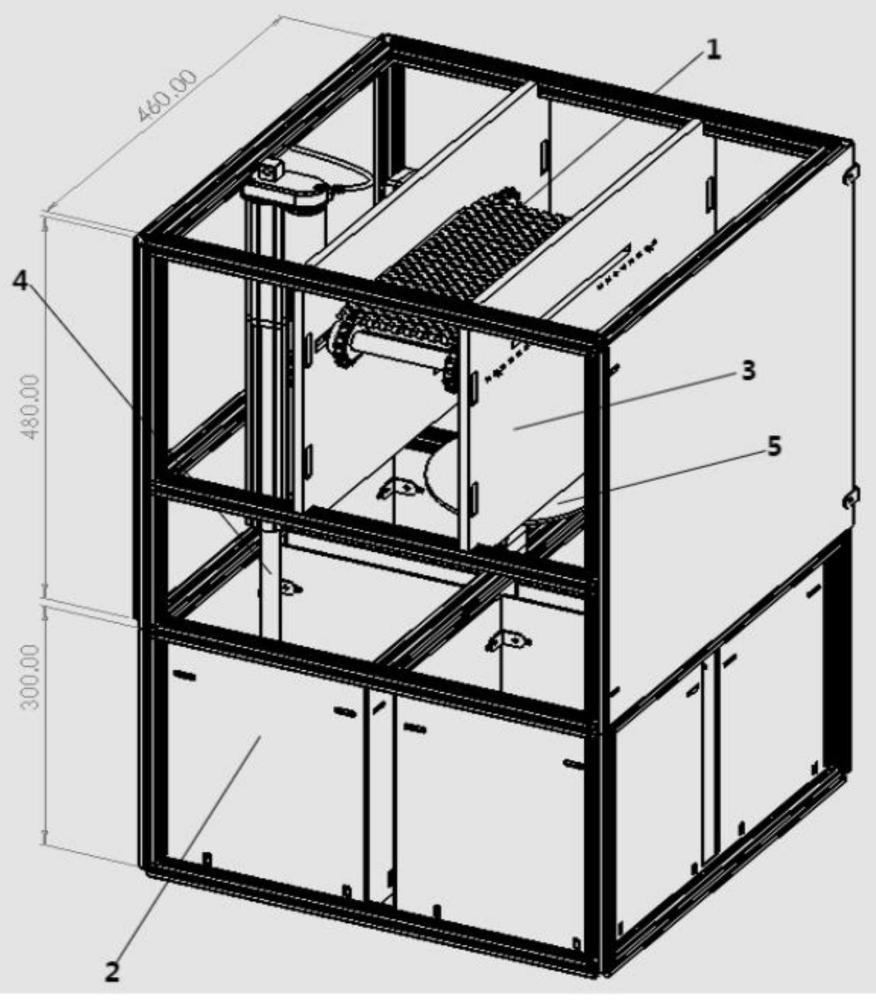
3、传输结构1包括上传送带、下传送带、步进电机,上传送带与下传送带之间转动连接一个步进电机,用于输送垃圾;
4、分类结构3包括:usb摄像头采集所述传输结构的垃圾图像数据,将所述垃圾图像数据传入分类模型resnet50,所述分类模型resnet50将垃圾图像数据转化tflite格式后进行垃圾分类,所述控制模块根据分类结果控制舵机改变托盘5的朝向将分类后的垃圾送入垃圾桶2。
5、另外的,所述控制模块为树莓派4b。
6、另外的,所述垃圾桶的数量为四个,分别为可回收垃圾垃圾桶、有害垃圾垃圾桶、厨余垃圾垃圾桶、其他垃圾垃圾桶。
7、另外的,还包括显示结构,所述显示结构为lcd高清显示屏,通过自编译pyqt5程序实时显示垃圾分类结果。
8、另外的,还包括满载检测结构,所述满载检测结构内设置有设定值,将所述显示结构的数据与所述满载检测结构中的设定值进行比较,控制所述压缩结构4进行压缩。
9、另外的,所述压缩结构4包括推拉杆、压缩板;所述推拉杆底部固定连接所述压缩板。
10、另外的,所述满载检测结构为u型光电传感器,当垃圾遮挡住所述u型光电传感器的激光头时,所述u型光电传感器的io口输出高电平;
11、当垃圾没有遮挡住所述u型光电传感器的激光头时,所述u型光电传感器的io口输出低电平,
12、将所述u型光电传感器放在垃圾桶的指定高度位置,通过检测所述u型光电传感器io口的电平来检测垃圾是否满载。
13、另外的,一种智能垃圾分类方法,包括:
14、将垃圾放入传输结构1,所述传输结构1通过所述步进电机驱动两个传送带输送垃圾;
15、usb摄像头将垃圾图像数据传入分类模型resnet50将垃圾图像数据转化tflite格式后进行垃圾分类;
16、控制模块根据分类结果控制舵机进行旋转改变托盘5的朝向,将分类后的垃圾送入垃圾桶2;
17、显示结构对分类后的垃圾进行计数,通过将所述显示结构的数据与满载检测结构的设定值进行比较来控制压缩结构4。
18、本发明实施例提供的上述一种智能垃圾分类装置及方法,与现有技术相比,其有益效果如下:
19、通过传输结构输送垃圾,usb摄像头采集垃圾图像数据,将垃圾图像数据传入分类模型resnet50,分类模型resnet50将垃圾图像数据转化tflite格式后进行垃圾分类,控制模块根据分类结果控制舵机改变托盘的朝向将分类后的垃圾送入垃圾桶;通过智能垃圾分类装置替代人为主观分类,保证垃圾分类的准确性。
技术特征:
1.一种智能垃圾分类装置,其特征在于,包括:
2.如权利要求1所述的一种智能垃圾分类装置,其特征在于,所述控制模块为树莓派4b。
3.如权利要求1所述的一种智能垃圾分类装置,其特征在于,所述垃圾桶的数量为四个,分别为可回收垃圾垃圾桶、有害垃圾垃圾桶、厨余垃圾垃圾桶、其他垃圾垃圾桶。
4.如权利要求1所述的一种智能垃圾分类装置,其特征在于,还包括显示结构,所述显示结构为lcd高清显示屏,通过自编译pyqt5程序实时显示垃圾分类结果。
5.如权利要求1所述的一种智能垃圾分类装置,其特征在于,还包括满载检测结构,所述满载检测结构内设置有设定值,将所述显示结构的数据与所述满载检测结构中的设定值进行比较,控制所述压缩结构(4)进行压缩。
6.如权利要求5所述的一种智能垃圾分类装置,其特征在于,所述压缩结构(4)包括推拉杆、压缩板;所述推拉杆底部固定连接所述压缩板。
7.如权利要求5所述的一种智能垃圾分类装置,其特征在于,所述满载检测结构为u型光电传感器,当垃圾遮挡住所述u型光电传感器的激光头时,所述u型光电传感器的io口输出高电平;
8.基于权利要求1-7任一所述的一种智能垃圾分类装置的一种智能垃圾分类方法,其特征在于,包括:
技术总结
本发明公开了一种智能垃圾分类装置及方法,其涉及垃圾分类收集技术领域。包括:传输结构包括上传送带、下传送带、步进电机,上传送带与下传送带之间转动连接一个步进电机,通过所述步进电机驱动两传送带,用于输送垃圾;分类结构包括:USB摄像头采集所述传输结构的垃圾图像数据,将所述垃圾图像数据传入分类模型resnet50,所述分类模型resnet50将垃圾图像数据转化tflite格式后进行垃圾分类,所述控制模块根据分类结果控制舵机改变托盘的朝向将分类后的垃圾送入垃圾桶。本发明通过智能垃圾分类装置替代人为主观分类,保证垃圾分类的准确性。
技术研发人员:苏靖钧,何知尧,李梓滕,曾国胜
受保护的技术使用者:长安大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!