一种基于堆煤过程监测回归的煤场煤堆密度在线评估装置、方法、存储介质及电子设备与流程
本发明属于煤场煤量测量,具体涉及一种基于堆煤过程监测回归的煤场煤堆密度在线评估装置、方法、存储介质及电子设备。
背景技术:
1、火力发电厂的主要燃料为煤炭,火力发电厂一般设有多个的煤场来贮存煤炭,目前大部分大型燃煤发电厂的煤场采用区域划分,多组煤堆存放模式,总体上依据不同煤质煤进行分堆堆放,相似煤质煤堆放在相同煤堆,从混配煤角度匹配煤场进行分堆堆煤和堆煤。盘煤就是盘点煤场的存煤量,随着火电厂机组的扩大和煤价的提高,盘煤越来越成为发电企业不可缺少的一个环节。传统的人工盘煤需要人工在煤场现场进行实地采集,即采用人工打点,打点数量较少,在采集过程中还可能存在有采集死角,形成的图形、体积与实际情况存在巨大误差,另一方面,盘煤过程中存在煤炭陷落、机械伤害、粉尘伤害等一系列危险,需要浪费大量人力、物力。
2、公开号cn116091718a具体公开一种基于单张二维图像的盘煤方法,属于煤场管理技术领域,包括以下步骤:s1、收集若干煤场二维图片和对应的三维点云数据,建立训练集;s2、建立并训练卷积神经网络,使得卷积神经网络能根据输入的二维图片输出精准的三维点云坐标信息;s3、将一张煤场的二维图片输入步骤s2训练完的卷积神经网络中,得到对应的三维点云坐标信息,并通过这些三维点云坐标信息构建煤场三维模型,从而计算出煤场体积,完成盘煤;本发明能仅通过单张二维图片实现煤场的三维建模,从而实现盘煤,成本低廉、方便快捷且能实现对煤场的实时监测。
3、目前人工盘煤已经逐步被激光自动盘煤取代,主要原理为:激光盘煤系统利用激光扫描测量技术和计算机图像处理技术,使用激光盘煤仪测量煤堆表面上的有限特征点的空间位置信息,利用这些点建立煤堆的立体模型,最终获得煤场表面形态和三维坐标数据,计算模型的体积并认可其为煤堆的体积,再根据参考密度或人为设定的密度经验值得出重量评估值。常见的激光盘煤系统借助斗轮机大臂、云台、无人机或轨道机器人搭载激光盘煤仪完成自动煤堆扫描,并通过无线数传电台或光纤通信方式将数据传输至集控室上位机,进行数据解析、计算与建模合成,生成煤场的三维立体图形,计算出煤场的体积,并根据参考密度或人为设定的密度经验值得出煤场的储煤量。
4、然而上述方法以及目前技术的发展方向均在不断加强煤堆轮廓测量的精度和速率,而忽略了另一个影响盘煤结果精度的关键值,即煤堆中煤的密度。根据参考密度或人为设定的密度经验值尽管可以在一定程度上反映煤堆中煤量的大致信息,但是也会导致盘煤结果的偏差和误差恶化。一方面不同煤质煤堆的密度存在一定的差异,且这种差异随着不断地堆取操作、堆放时间的增长以及煤质自身随着堆放的变化等越发明显,另一方面,不同煤质煤堆的密度也因为煤质的巨大差异、不同电厂、煤场以及堆放设备而难以准确评估,这些都严重制约了煤场盘煤精度的进一步提升。目前的高煤价以及燃煤电站复杂的运行条件均对盘煤精度提出了更高的要求,实现精确盘煤势在必行、迫在眉睫。
技术实现思路
1、有鉴于此,本发明针对现有技术的不足,提供的基于堆煤过程监测回归的煤场煤堆密度在线评估装置、方法、存储介质及电子设备,发明解决了煤堆密度在线评估时精度差的问题。
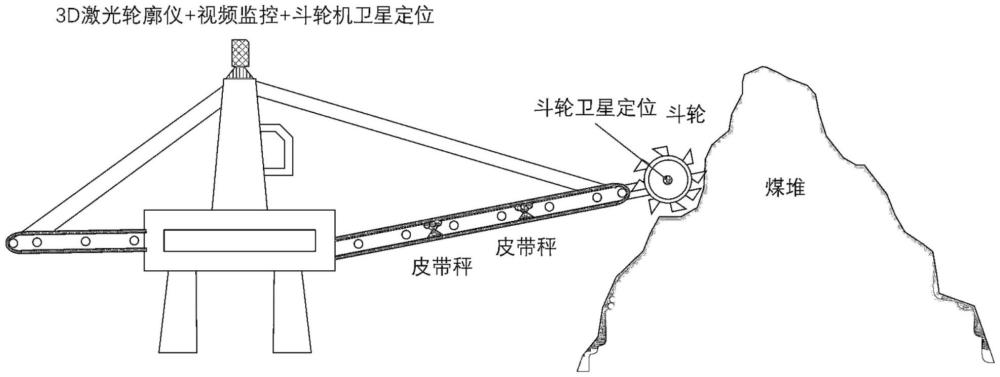
2、为解决上述技术问题,本发明所采取的技术方案是:一种基于堆煤过程监测回归的煤场煤堆密度在线评估装置,包括斗轮机,所述斗轮机上设置有堆煤用的斗轮,所述斗轮通过皮带秤与所述斗轮机主体相连,所述斗轮上设置有斗轮卫星定位系统,所述斗轮机的主体顶部设置有3d激光轮廓仪、视频监控系统和斗轮机卫星定位系统。
3、本发明还提供一种基于堆煤过程监测回归的煤场煤堆密度在线评估方法,包括步骤,s1,在斗轮机堆煤工作阶段,利用斗轮卫星定位系统,获取当前斗轮堆煤的精准位置信息;s2,利用3d激光轮廓仪仅对当前堆煤局部区域进行快速轮廓建模得出精确堆煤体积;s3,通过皮带秤实时堆煤重量结果的回溯,匹配前后两次堆煤煤堆体积建模时刻,获取当前堆煤操作下堆煤区域取出的精确煤重量信息;s4,同步匹配实时堆煤处的位置信息、体积信息和重量信息,计算得到当前煤堆、当前堆煤区域、当前堆煤高度堆积煤的密度信息,形成数据库;s5,盘煤阶段,直接驱动斗轮机在斗轮机卫星定位系统的指导下,实施多点固定位置定点固定模式测量,利用3d激光轮廓仪获得不同煤堆外围轮廓信息,进而获得不同煤堆、不同高度煤堆堆积煤体积;s6,利用已堆煤堆密度,匹配盘煤过程不同煤堆轮廓测量结果,获得的不同位置不同体积测量结果以获得更精准的盘煤结果。
4、进一步地,所述s3具体还包括,所述斗轮堆煤到所述皮带秤后,利用所述斗轮机自身具备的堆煤皮带秤,在皮带秤实时堆煤重量,并将称重结果回溯。
5、进一步地,具体还包括,所述3d激光轮廓仪、用于监测环境的视频监控系统和斗轮机卫星定位系统直接安装在斗轮机机顶处,便于全方位全视角监测周边环境。
6、进一步地,设置于斗轮机机顶的视频环境监控系统,一方面配合斗轮机卫星定位装置,参考图像位置信息标准比例尺,校核当前斗轮卫星定位,消除因天气、煤场顶棚等原因导致的斗轮卫星定位错误或者偏差;另一方面,利用景差分析,校核当前轮廓测量结果,消除因天气、灰尘、粉尘、热气流等原因导致的堆煤区域轮廓错误或者偏差。
7、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现任意一项所述的基于堆煤过程监测回归的煤场煤堆密度在线评估方法。
8、本发明还提供一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现任意一项所述的基于堆煤过程监测回归的煤场煤堆密度在线评估方法。
9、根据参考密度或人为设定的密度经验值尽管可以在一定程度上反映煤堆中煤量的大致信息,但是也会导致盘煤结果的偏差和误差恶化。不同煤质煤堆的密度存在一定的差异,且这种差异随着不断地堆取操作、堆放时间的增长以及煤质自身随着堆放的变化等越发明显,公开号cn116499364a具体公开了一种盘煤仪三维激光点云调畸变方法及系统,所述方法包括以下步骤:采集煤堆的3d激光点云数据,并通过煤堆的3d激光点云数据获取畸变位置数据;获取参数标定好的摄像头采集激光标定板的真实位置数据;通过畸变位置数据和真实位置数据对比获取畸变校正函数;通过畸变校正函数对煤堆的3d激光点云数据进行校正,得到畸变校正后的煤堆的3d激光点云数据。本发明还公开了一种盘煤仪三维激光点云调畸变系统。本发明通过利用参数标定好的摄像头来获取真实位置数据,进而对畸变位置数据进行校正,避免了激光扫描进行三维构建中出现点云畸变影响盘煤结果的技术问题。但是本技术依旧没法对煤堆的密度进行实时评估,不同煤质煤堆的密度也因为煤质的巨大差异、不同电厂、煤场以及堆放设备而难以准确评估,这些都严重制约了煤场盘煤精度的进一步提升。目前的高煤价以及燃煤电站复杂的运行条件均对盘煤精度提出了更高的要求,实现精确盘煤势在必行、迫在眉睫。
10、与现有技术相比,本发明的有益效果如下:
11、本发明通过对斗轮位置信息和获得的煤堆堆积煤的密度信息的匹配,形成具有不同煤堆、不同高度、不同位置信息的煤堆堆积煤的密度信息阵列式数据库。利用3d激光轮廓仪获得不同煤堆外围轮廓信息,进而获得不同煤堆、不同高度煤堆堆积煤体积,利用已堆煤堆密度进行数学人工智能建模,获得煤堆密度数据库和相应的分布特性模型并建立修正方法,匹配盘煤过程不同煤堆轮廓测量结果,直接乘以轮廓测量获得的不同位置不同体积测量结果以获得更精准的盘煤结果,相较于利用单一不变的参考密度或人为设定的密度经验值在盘煤结果精度上有显著提升。
12、通过设置于斗轮机机顶的视频环境监控,一方面配合斗轮机卫星定位装置,利用视觉分析,通过比对斗轮卫星定位时刻在固定的视频环境监控中位置的变化,参考图像位置信息标准比例尺,校核当前斗轮卫星定位,消除因天气、煤场顶棚等原因导致的斗轮卫星定位错误或者偏差,提高当前堆煤位置信息精度;另一方面,也配合斗轮机卫星定位装置,利用景差分析,即通过比对两次3d激光轮廓仪建模时刻在固定的视频环境监控中煤堆图像的变化,利用图像识别参考图像景深、像素点等信息,校核当前轮廓测量结果,消除因天气、灰尘、粉尘、热气流等原因导致的堆煤区域轮廓错误或者偏差。视频环境监控还会自动识别出天气、气候条件等信息,通过对雨雪等大量含水显著影响密度测量条件下密度测量结果及干燥条件下密度测量结果数据库进行比对分析,匹配天气、气候信息,形成水量、温度等因素的精准校正,从而获得准确盘煤结果。
- 还没有人留言评论。精彩留言会获得点赞!