一种玻璃瓶的夹持翻转设备的制作方法
本申请涉及玻璃瓶加工设备,特别涉及一种玻璃瓶的夹持翻转设备。
背景技术:
1、在玻璃瓶制作行业中,需先将熔化后的玻璃料成型为各种玻璃瓶制品(例如玻璃酒瓶、玻璃香水瓶),成型的玻璃瓶生产出来之后,后续会在瓶身上贴膜增加标签之后,然后再进行撕膜的工艺。在此过程中,玻璃瓶往往呈倒立状态,为便于后续生产,在此需要将玻璃瓶从倒立状态翻转为直立状态。通常情况下,会直接采用并联机器人的机械爪对玻璃瓶进行夹取和翻转,在将玻璃瓶翻转为直立状态,并放至生产线上后,再进行下一个玻璃瓶的夹取和翻转,此时,直接使用机械手来进行夹取、翻转及放下这几个步骤的操作,往往会使得整个翻转过程效率较为低下。因而可以设计一种夹持翻转设备,当机械爪抓取玻璃瓶后,可利用夹持翻转设备来对玻璃瓶进行翻转,当夹持翻转设备对玻璃瓶进行翻转的过程中,机械爪可以对下一个玻璃瓶进行抓取夹持,以提高整套机构对于玻璃瓶的翻转效率。
技术实现思路
1、本申请实施例提供一种玻璃瓶的夹持翻转设备,以解决相关技术中,仅利用并联机器人对玻璃瓶进行夹持和翻转时产生的效率较低的问题。
2、本申请实施例提供了一种玻璃瓶的夹持翻转设备,包括:
3、夹持装置,所述夹持装置包括旋转板以及设置于所述旋转板上的夹紧机构,所述夹紧机构包括两个相对设置的夹持组件,两个所述夹持组件可朝相互接近或相互远离的方向进行滑移;
4、并联机器人,所述并联机器人用于将玻璃瓶从流水线运送至所述夹持装置;
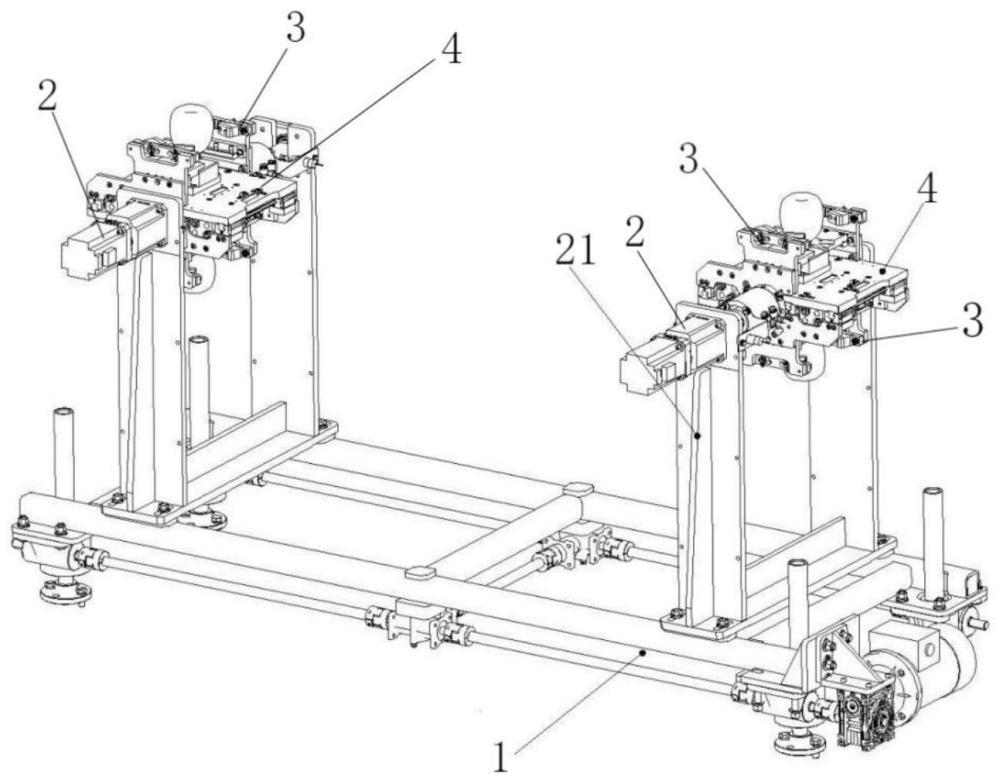
5、翻转装置,所述翻转装置转动连接于所述旋转板,用于对所述旋转板进行翻转。
6、在一些实施例中,所述翻转装置包括转动连接于所述夹持装置的旋转轴,以及用于驱动所述旋转轴的第二减速电机。
7、在一些实施例中,所述夹持组件包括安装板以及固定于所述安装板的夹持柄;
8、所述旋转板上设置有滑动连接于所述夹持组件的导轨,以及驱动所述安装板的气缸,且在所述旋转轴上设置有连接于所述气缸的气滑环。
9、在一些实施例中,还包括升降装置,所述翻转装置固定设置于所述升降装置,所述升降装置用于调节所述翻转装置的高度。
10、在一些实施例中,所述升降装置包括螺纹升降器和用于驱动所述螺纹升降器的第一减速电机,以及连接于所述螺纹升降器,并用于固定所述翻转装置的支架,所述支架可在所述螺纹升降器的带动下进行升降。
11、在一些实施例中,所述翻转装置底部设置有支撑座,所述支撑座固定设置于所述支架上。
12、在一些实施例中,所述夹紧机构设置有两个,两个所述夹紧机构分别固定于所述旋转板的两面,其中一个所述夹紧机构夹紧玻璃瓶时,另一所述夹紧机构释放玻璃瓶。
13、在一些实施例中,所述夹持柄包括用于夹持玻璃瓶瓶身的第一夹持柄以及用于夹持玻璃瓶瓶口的第二夹持柄;
14、所述第一夹持柄包括两个对称设置的梯形块,两个所述梯形块的表面形成钝角;
15、所述第二夹持柄包括凹形块,所述凹形块的表面呈“v”字形,所述凹形块相对所述安装板的伸出长度大于所述梯形块相对所述安装板的伸出长度。
16、在一些实施例中,所述旋转板上设置有位于两个所述夹持组件之间的定位板,所述定位板上开设有用于限位玻璃瓶瓶口的凹槽。
17、在一些实施例中,所述导轨上相对设置有限位块,所述限位块用于限制两个所述夹持组件朝相互接近的方向进行滑移时的滑移距离。
18、本申请提供的技术方案带来的有益效果包括:
19、本申请实施例提供了一种玻璃瓶的夹持翻转设备,由于本申请的夹持翻转设备包括夹持装置、并联机器人和翻转装置,所述夹持装置包括旋转板以及设置于所述旋转板上的夹紧机构,所述夹紧机构包括两个相对设置的夹持组件,两个所述夹持组件可朝相互接近或相互远离的方向进行滑移;所述并联机器人用于将玻璃瓶从流水线运送至所述夹持装置;所述翻转装置转动连接于所述旋转板,用于对所述旋转板进行翻转。
20、在实际使用中,并联机器人将玻璃瓶直接夹取放置于夹持装置上,此时,玻璃瓶由于流水线上的前步工序,呈倒立状态,而后,两个夹持组件朝相互接近的方向进行滑移,以夹持玻璃瓶,后通过翻转装置转动旋转板,从而使得设置于旋转板上的夹持组件翻转,将玻璃瓶从倒立状态翻转为直立状态,为后续加工做准备。在夹持装置和翻转装置对一个玻璃瓶进行夹持和翻转时,并联机器人能够对下一个玻璃瓶进行抓取,当夹持装置和翻转装置完成对前一玻璃瓶的翻转后,便可继续对下一个玻璃瓶进行夹持和翻转,在此过程中,有助于提高对于玻璃瓶的翻转效率。
技术特征:
1.一种玻璃瓶的夹持翻转设备,其特征在于,包括:
2.如权利要求1所述的一种玻璃瓶的夹持翻转设备,其特征在于:
3.如权利要求2所述的一种玻璃瓶的夹持翻转设备,其特征在于:
4.如权利要求1所述的一种玻璃瓶的夹持翻转设备,其特征在于:
5.如权利要求4所述的一种玻璃瓶的夹持翻转设备,其特征在于:
6.如权利要求5所述的一种玻璃瓶的夹持翻转设备,其特征在于:
7.如权利要求1所述的一种玻璃瓶的夹持翻转设备,其特征在于:
8.如权利要求3所述的一种玻璃瓶的夹持翻转设备,其特征在于:
9.如权利要求1或8所述的一种玻璃瓶的夹持翻转设备,其特征在于:
10.如权利要求3所述的一种玻璃瓶的夹持翻转设备,其特征在于:
技术总结
本申请涉及一种玻璃瓶的夹持翻转设备,属于玻璃瓶加工设备技术领域。本申请的夹持翻转设备包括夹持装置、并联机器人和翻转装置,所述夹持装置包括旋转板以及设置于所述旋转板上的夹紧机构,所述夹紧机构包括两个相对设置的夹持组件,两个所述夹持组件可朝相互接近或相互远离的方向进行滑移;所述并联机器人用于将玻璃瓶从流水线运送至所述夹持装置;所述翻转装置转动连接于所述旋转板,用于对所述旋转板进行翻转。在此过程中,有助于提高对于玻璃瓶的翻转效率。
技术研发人员:邓家辉,蔡志相,聂云飞,郭云飞,刘虎,范生政
受保护的技术使用者:湖北楚大智能装备股份有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!