自动锁定机构和工程机械的制作方法
本申请涉及工程机械,具体地涉及一种自动锁定机构和工程机械。
背景技术:
1、臂式高空作业平台分为底盘、转台、臂架、工作平台等几大部分,上车由转台、臂架、工作平台组成。因工况需要,上车需进行旋转,且需要判定回转位置及方向。因此,底盘与上车之间使用了回转支承连接,实现回转功能。高空作业平台做转运时为了防止上车转动,在上车与底盘之间设置了防止转动的锁定装置,通过止动套、开启装置、止动销、止动板实现锁止功能。当手动锁定上车机构后,上车机构还会存在回转力矩。在锁定装置锁定后,回转力矩使得锁定装置的锁定连接处产生较大的剪切力,而锁定装置反复受到较大剪切力后容易产生损坏。
技术实现思路
1、本申请实施例的目的是提供一种自动锁定机构和工程机械,用以解决现有技术中锁定装置反复受到较大剪切力后产生损坏的技术问题。
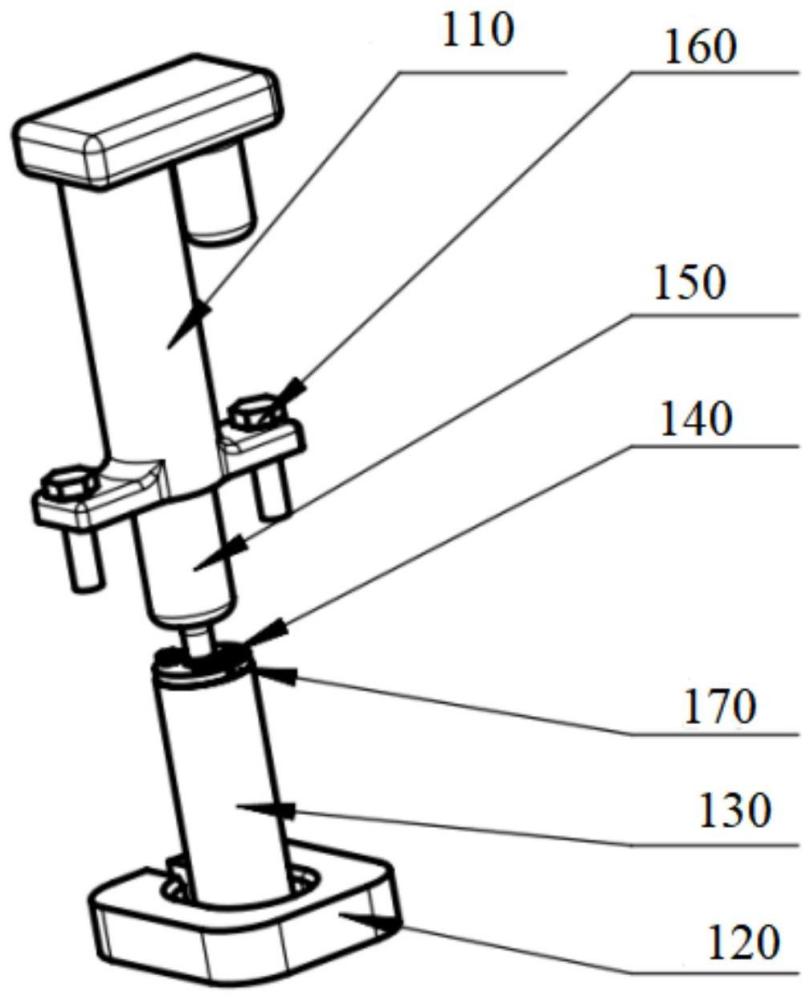
2、为了实现上述目的,本申请第一方面提供一种自动锁定机构,包括:
3、驱动装置,驱动装置与工程机械的上车机构连接,用于驱动锁止销;
4、锁止板,锁止板安装于工程机械的下车机构,锁止板上有销轴孔;
5、锁止销,锁止销用于在推入销轴孔后,使得工程机械的下车机构和上车机构停止相对运动;
6、万向球,万向球分别与驱动装置和锁止销连接,用于增加驱动装置与锁止销的自由度。
7、在本申请的实施例中,还包括:电动推杆,电动推杆的两端分别与驱动装置和万向球连接,用于传递驱动装置的驱动力至锁止销。
8、在本申请的实施例中,还包括:第一固定件,用于将电动推杆固定与驱动装置;第二固定件,用于连接万向球和锁止销。
9、在本申请的实施例中,锁止销与万向球连接的端部开设有收纳槽,用于万向球在收纳槽滚动。
10、本申请第二方面提供一种工程机械,包括:
11、上车机构;
12、下车机构;以及
13、上述的自动锁定机构。
14、在本申请的实施例中,工程机械还包括:控制器,控制器被配置成:在确定锁止销已对准销轴孔的情况下,控制驱动装置驱动锁止销推入销轴孔。
15、在本申请的实施例中,工程机械还包括回转机构,分别与上车机构和下车机构连接,以使上车机构和下车机构产生相对运动。
16、在本申请的实施例中,工程机械还包括回转定位装置,回转定位装置包括回转编码器,安装于回转机构,用于检测上车机构的回转方向。
17、在本申请的实施例中,回转定位装置还包括:激光定位器,安装于上车机构,用于扫描回转锁定识别器;回转锁定识别器,安装于下车机构的预设位置,激光定位器扫描到回转锁定识别器的情况下,锁止销已对准销轴孔。
18、在本申请的实施例中,回转定位装置还包括刻度条,安装于下车机构,用于标记上车机构的回转角度,激光定位器还用于扫描刻度条,用于确定上车机构的回转角度。
19、通过上述技术方案,自动锁定机构包括驱动装置,驱动装置与工程机械的上车机构连接,用于驱动锁止销;锁止板,锁止板安装于工程机械的下车机构,锁止板上有销轴孔;锁止销,锁止销用于在推入销轴孔后,使得工程机械的下车机构和上车机构停止相对运动;万向球,万向球分别与驱动装置和锁止销连接,用于增加驱动装置与锁止销的自由度。万向球增加驱动装置与锁止销之间连接处的自由度,减少驱动装置和锁止销受到的剪切力,保护自动锁定机构的部件。
20、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种自动锁定机构,其特征在于,包括:
2.根据权利要求1所述的自动锁定机构,其特征在于,还包括:
3.根据权利要求2所述的自动锁定机构,其特征在于,还包括:
4.根据权利要求1所述的自动锁定机构,其特征在于,所述锁止销与所述万向球连接的端部开设有收纳槽,用于所述万向球在所述收纳槽滚动。
5.一种工程机械,其特征在于,包括:
6.根据权利要求5所述的工程机械,其特征在于,所述工程机械还包括:
7.根据权利要求5所述的工程机械,其特征在于,所述工程机械还包括回转机构,分别与所述上车机构和所述下车机构连接,以使所述上车机构和所述下车机构产生相对运动。
8.根据权利要求7所述的工程机械,其特征在于,所述工程机械还包括回转定位装置,所述回转定位装置包括回转编码器,安装于所述回转机构,用于检测所述上车机构的回转方向。
9.根据权利要求8所述的工程机械,其特征在于,所述回转定位装置还包括:
10.根据权利要求9所述的工程机械,其特征在于,所述回转定位装置还包括刻度条,安装于所述下车机构,用于标记所述上车机构的回转角度,所述激光定位器还用于扫描所述刻度条,用于确定所述上车机构的回转角度。
技术总结
本申请公开了一种动锁定机构和工程机械,自动锁定机构包括:驱动装置,驱动装置与工程机械的上车机构连接,用于驱动锁止销;锁止板,锁止板安装于工程机械的下车机构,锁止板上有销轴孔;锁止销,锁止销用于在推入销轴孔后,使得工程机械的下车机构和上车机构停止相对运动;万向球,万向球分别与驱动装置和锁止销连接,用于增加驱动装置与锁止销的自由度。万向球增加驱动装置与锁止销之间连接处的自由度,减少驱动装置和锁止销受到的剪切力,保护自动锁定机构的部件。
技术研发人员:雷发兵,王光辉,施俊波,刘豪,齐绍寅,高坚
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!