工作平台辅助控制方法、装置、设备及存储介质与流程
本申请涉及近电作业工作平台安全管控,具体地涉及一种工作平台辅助控制方法、装置、设备及存储介质。
背景技术:
1、现代城市的生产生活离不开电,电力系统分布于城市各个位置,在市政施工建设中,经常需要进行近电高空作业,且施工环境周围存在许多障碍物。在近电作业环境中,使用高空作业车或者伸缩臂式叉车配备的工作平台载人进行高空作业时,由于工作平台周围存在带电体,导致施工过程中作业人员处于近电作业环境,同时缺乏相应的保护措施,近电作业危险程度很高,容易造成巨大的人力和物力损失。
2、虽然各种类型的绝缘车可以实现近电作业,但是绝缘车是带电作业的专用车辆,制造难度大,使用成本十分高昂,而且近电作业的危险程度远低于带电作业,使用绝缘车作业的性价比很低。此外,实际施工过程中有些工况需要安装较重的物料和工件,工人无法搬运,需要单独的起重机械将物料或工件吊起,再由工人进行安装,效率较低。
技术实现思路
1、本申请实施例的目的是提供一种工作平台辅助控制方法、装置、设备及存储介质,旨在解决现有技术中工作平台周围存在带电体导致近电作业危险程度高的技术问题。
2、为了实现上述目的,本申请第一方面提供一种工作平台辅助控制方法,包括:
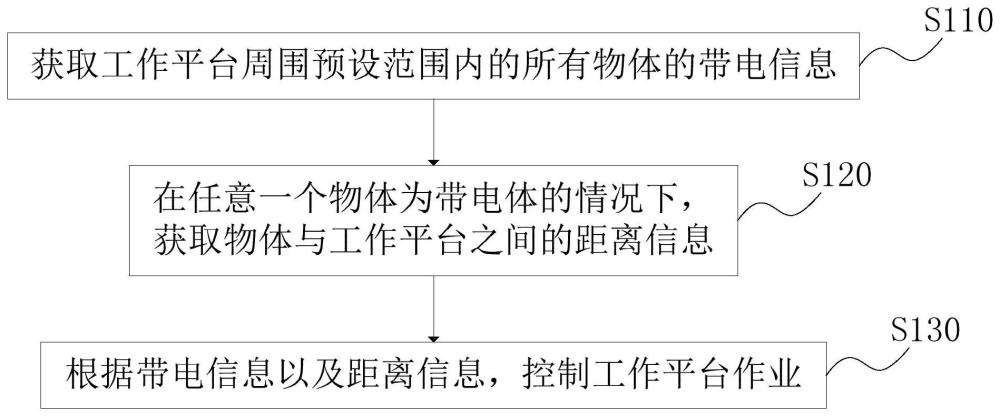
3、获取工作平台周围预设范围内的所有物体的带电信息;
4、在任意一个物体为带电体的情况下,获取物体与工作平台之间的距离信息;
5、根据带电信息以及距离信息,控制工作平台作业。
6、在本申请实施例中,获取工作平台周围预设范围内的所有物体的带电信息,包括:
7、检测工作平台周围预设范围内的所有物体是否存在带电体;
8、在工作平台周围预设范围内存在为带电体的物体的情况下,获取为带电体的物体的带电信息,其中,带电信息包括电压强度。
9、在本申请实施例中,根据带电信息以及距离信息,控制工作平台作业,包括:
10、确定带电信息对应的距离阈值;
11、根据距离阈值以及距离信息确定控制策略;
12、根据控制策略控制工作平台作业。
13、在本申请实施例中,距离阈值包括第一距离阈值和第二距离阈值,其中,第一距离阈值大于第二距离阈值,根据距离阈值以及距离信息确定控制策略,包括:
14、在距离信息大于第一距离阈值的情况下,确定控制策略为发出报警信号;
15、在距离信息小于等于第一距离阈值且大于等于第二距离阈值的情况下,确定控制策略为发出报警信号并且对工作平台进行限速操作;
16、在距离信息小于第二距离阈值的情况下,确定控制策略为控制工作平台停止作业。
17、在本申请实施例中,在任意一个物体为带电体的情况下,获取物体与工作平台之间的距离信息,包括:
18、在任意一个物体为带电体的情况下,获取工作平台靠近物体的一侧与物体之间的多个距离数据;
19、将多个距离数据的最小值确定为物体与工作平台之间的距离信息。
20、本申请第二方面提供一种工作平台辅助控制装置,包括:
21、存储器,被配置成存储指令;以及
22、处理器,被配置成从存储器调用指令以及在执行指令时能够实现如第一方面所述的工作平台辅助控制方法。
23、本申请第三方面提供一种工作平台,包括:
24、如第二方面所述的工作平台辅助控制装置;
25、近电感应装置,用于检测工作平台周围预设范围内的所有物体的带电信息;
26、距离感应装置,用于检测物体与工作平台之间的距离信息。
27、在本申请实施例中,工作平台还包括:
28、报警装置,用于根据带电信息和距离信息发出相应的报警信号。
29、在本申请实施例中,工作平台还包括:
30、起重吊臂,用于吊装物料或工件;
31、绝缘罩,设置于起重吊臂上,用于对工作平台进行物理防护。
32、本申请第四方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令用于使得机器执行如第一方面所述的工作平台辅助控制方法。
33、通过上述技术方案,能够获取工作平台周围带电体的带电信息以及工作平台与带电体之间的距离信息,根据带电信息与距离信息确定对应的控制策略,辅助控制工作平台进行近电施工作业,确保近电作业安全。
34、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种工作平台辅助控制方法,其特征在于,包括:
2.根据权利要求1所述的工作平台辅助控制方法,其特征在于,所述获取工作平台周围预设范围内的所有物体的带电信息,包括:
3.根据权利要求1所述的工作平台辅助控制方法,其特征在于,根据所述带电信息以及所述距离信息,控制所述工作平台作业,包括:
4.根据权利要求3所述的工作平台辅助控制方法,其特征在于,所述距离阈值包括第一距离阈值和第二距离阈值,其中,所述第一距离阈值大于所述第二距离阈值,所述根据所述距离阈值以及所述距离信息确定控制策略,包括:
5.根据权利要求1所述的工作平台辅助控制方法,其特征在于,所述在任意一个所述物体为带电体的情况下,获取所述物体与所述工作平台之间的距离信息,包括:
6.一种工作平台辅助控制装置,其特征在于,包括:
7.一种工作平台,其特征在于,包括:
8.根据权利要求7所述的工作平台,其特征在于,还包括:
9.根据权利要求7所述的工作平台,其特征在于,还包括:
10.一种机器可读存储介质,其特征在于,该机器可读存储介质上存储有指令,该指令用于使得机器执行根据权利要求1至5中任一项所述的工作平台辅助控制方法。
技术总结
本申请涉及近电作业工作平台安全管控技术领域,公开了工作平台辅助控制方法、装置、设备及存储介质,工作平台辅助控制方法包括:获取工作平台周围预设范围内的所有物体的带电信息;在任意一个所述物体为带电体的情况下,获取所述物体与所述工作平台之间的距离信息;根据所述带电信息以及所述距离信息,控制所述工作平台作业,本申请公开的工作平台辅助控制方法能够获取工作平台周围带电体的带电信息以及工作平台与带电体之间的距离,从而辅助控制工作平台进行近电施工作业,确保近电作业安全。
技术研发人员:邓卫,陈孝金,钟发忠
受保护的技术使用者:湖南中联重科智能高空作业机械有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!