便于更换装载容器的轨道系统的制作方法
本技术涉及传输装载容器领域,特别是涉及便于更换装载容器的轨道系统。
背景技术:
1、随着医疗设备自动化技术的大力发展,医学实验室自动化程度也在飞速的发展,目前在自动化实验室中,采用样本装载容器容纳样本管,样本装载容器亦称管托,其通常需要一个回转机构,用于改变管托的运动方向,形成循环;并且在管托内装载有rfid芯片,用于绑定样本信息,以实现样本在输送轨道上快速流通。在实际应用中,由于存在各种不可避免的因素,时常会出现需要往自动化流水线中补充正常管托或取出流水线中异常管托的需求,而正常情况下流水线的轨道是封闭的,且不便于取放管托。
2、申请公布号为cn112684196a的中国专利,公开了一种医用实验室自动化流水线变轨装置,包括:运载架、运输轨道、测试轨道、用于改变运载架的运行轨迹的拨盘机构、用于限制运载架的运行轨迹的拨块机构、用于检测运载架的位置的检测装置、用于采集运载架的运输信息的采集装置以及控制装置;拨盘机构和拨块机构设于运输轨道和测试轨道的贴合处、且沿轨道运行方向前后分布;拨盘机构包括可在运输轨道和测试轨道的平面内转动的转盘,转盘设有用于容纳运载架的月牙槽,拨块机构可在平面内转动、以封堵运输轨道或测试轨道;拨盘机构、拨块机构、检测装置以及采集装置均与控制装置连接。所述便于更换装载容器的轨道系统(900)可根据样本和运载架的实际需求进行变轨操作,以快速灵活的进行样本分配操作。
3、但是传统技术存在以下问题,一是轨道虽可实现末端回转,但无法可控地进行样本装载容器更换,导致更换流水线上样本装载容器不便捷;二是轨道宽度较大导致占用空间大。
技术实现思路
1、基于此,有必要提供一种便于更换装载容器的轨道系统。
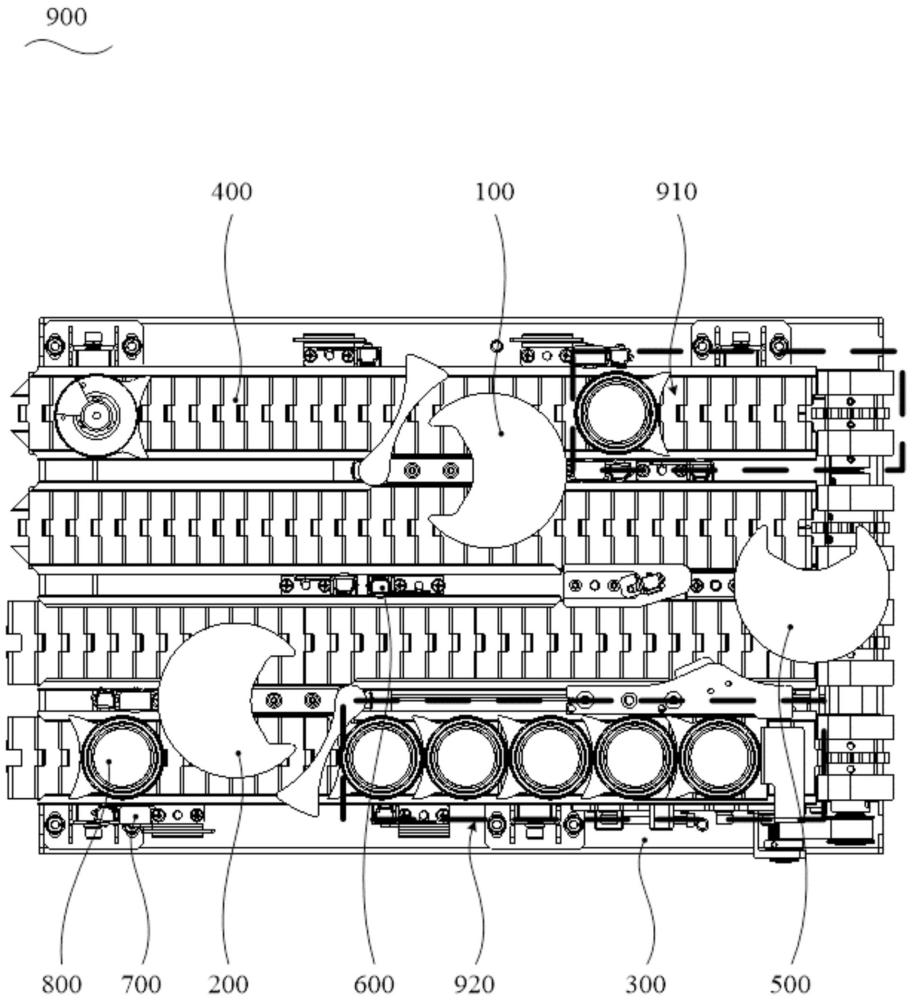
2、在一个实施例中,一种便于更换装载容器的轨道系统,包括机架及分别设置于所述机架上的第一同向换轨机构、第二同向换轨机构、轨道传送机构、传感控制机构、读取识别机构;
3、所述第一同向换轨机构及所述第二同向换轨机构均位于所述轨道传送机构上,所述轨道传送机构设置为输送装载容器;
4、所述便于更换装载容器的轨道系统于所述轨道传送机构上设有装载容器补充区及故障装载容器缓存区;
5、所述第一同向换轨机构设置为配合所述传感控制机构及所述读取识别机构,将所述装载容器补充区中的装载容器换轨至所述轨道传送机构上;
6、所述第二同向换轨机构设置为配合所述传感控制机构及所述读取识别机构,将所述轨道传送机构上的装载容器换轨至所述故障装载容器缓存区中。
7、上述便于更换装载容器的轨道系统,一方面通过增加故障装载容器缓存区,实现了方便取出故障装载容器的效果;另一方面通过设置装载容器补充区,来实现便捷地加入补充装载容器的效果;再一方面通过增加第一同向换轨机构及第二同向换轨机构,实现了装载容器在所述轨道传送机构上的换轨作用;整体具有应用方便,对传统轨道传送设备改动较小的优点,易于推广应用。
8、在其中一个实施例中,所述轨道传送机构包括传送方向相异设置的第一组同向轨道及第二组同向轨道;
9、所述第一组同向轨道包括邻近设置且传送方向相同的第一轨道及第二轨道,所述第二组同向轨道包括邻近设置且传送方向相同设置的第三轨道及第四轨道,且所述第二轨道与所述第三轨道邻近设置;
10、所述装载容器补充区位于所述第四轨道且远离所述第三轨道的输出端,所述装载容器补充区设置为放置所述装载容器中的补充装载容器;
11、所述故障装载容器缓存区位于所述第一轨道且远离所述第二轨道的输入端,所述故障装载容器缓存区设置为暂存所述装载容器中的故障装载容器,且所述故障装载容器缓存区于所述第一轨道的输出端设有故障装载容器取出位。
12、在其中一个实施例中,所述传感控制机构包括邻近所述第四轨道的第二传感器,所述第二传感器设置为确定在所述装载容器补充区中所述补充装载容器的状态;
13、所述读取识别机构包括邻近所述第四轨道的第二读取器,所述第二读取器设置为确定所述补充装载容器的入轨路径;
14、所述第一同向换轨机构包括第一容纳转动机构及第一转动导轨机构;
15、所述第一转动导轨机构设置为根据所述入轨路径开放所述第三轨道或所述第四轨道;
16、所述第一容纳转动机构设置为以转动方式至少部分容纳所述补充装载容器,配合所述第一转动导轨机构将所述补充装载容器换轨至所述第三轨道上或保留于所述第四轨道上,作为正常装载容器;
17、所述传感控制机构包括邻近所述第四轨道及所述第一转动导轨机构的第三传感器及/或邻近所述第三轨道及所述第一转动导轨机构的第四传感器,所述第三传感器及所述第四传感器均设置为确定所述补充装载容器经过的状态下,复位所述第一容纳转动机构及所述第一转动导轨机构。
18、在其中一个实施例中,所述传感控制机构包括邻近所述第三轨道输入端的第一传感器,所述读取识别机构包括邻近所述第一传感器的第一读取器,所述第一传感器设置为确定所述第三轨道上的所述装载容器经过的状态下,使能所述第一读取器、所述第一容纳转动机构及所述第一转动导轨机构;
19、所述第一读取器设置为确定所述装载容器的目标路径,所述第一转动导轨机构设置为根据所述目标路径导通所述第三轨道或所述第四轨道;
20、所述第一容纳转动机构设置为以转动方式至少部分容纳所述装载容器,配合所述第一转动导轨机构将所述装载容器保留于所述第三轨道上或换轨至所述第四轨道上,作为正常装载容器。
21、在其中一个实施例中,所述第二同向换轨机构包括相邻近的第二容纳转动机构及第二转动导轨机构;
22、所述传感控制机构包括邻近所述第一轨道的第七传感器及邻近所述第二轨道的第六传感器;
23、所述第七传感器设置为确定在所述第一轨道上传送的所述装载容器的状态,使能所述第二容纳转动机构;
24、所述第六传感器设置为确定在所述第二轨道上传送的所述装载容器的状态,使能所述第二容纳转动机构;
25、所述读取识别机构包括邻近所述第一轨道的第四读取器及邻近所述第二轨道的第三读取器,所述第三读取器及所述第四读取器均设置为确定所述装载容器的目标路径;
26、所述第二转动导轨机构设置为根据所述目标路径导通所述第一轨道或所述第二轨道;
27、对于所述装载容器中的正常装载容器,所述第二容纳转动机构设置为以转动方式避位以放行所述第二轨道上的所述正常装载容器,或以转动方式至少部分容纳所述第一轨道上的所述正常装载容器,配合所述第二转动导轨机构将所述第一轨道上的所述正常装载容器换轨至所述第二轨道上;
28、对于所述装载容器中的故障装载容器,所述第二容纳转动机构设置为以转动方式避位以放行所述第一轨道上的所述故障装载容器,或以转动方式至少部分容纳所述第二轨道上的所述故障装载容器配合所述第二转动导轨机构将所述第二轨道上的所述故障装载容器换轨至所述第一轨道上,以使所述故障装载容器进入所述故障装载容器缓存区中。
29、在其中一个实施例中,所述传感控制机构包括邻近所述故障装载容器缓存区的第八传感器,所述第八传感器设置为确定所述故障装载容器经过的状态下,复位所述第二容纳转动机构及所述第二转动导轨机构;及/或,
30、所述传感控制机构包括邻近所述第二轨道及所述第二转动导轨机构的第五传感器,所述第五传感器设置为确定所述第二轨道上的所述正常装载容器经过的状态下,复位所述第二容纳转动机构及所述第二转动导轨机构。
31、在其中一个实施例中,所述传感控制机构包括邻近所述故障装载容器缓存区的第八传感器,所述第八传感器设置为确定所述故障装载容器经过的状态下,复位所述第二容纳转动机构及所述第二转动导轨机构;并且,所述便于更换装载容器的轨道系统还包括提示机构,所述提示机构电连接所述第八传感器,所述提示机构设置为在所述第八传感器操作复位次数达到预设阈值的状态下,或在所述第八传感器操作复位持续发生的状态下,发出提示信号;及/或,
32、所述读取识别机构包括光电识别机构、射频识别机构及摄像识别机构;或者,所述第一组同向轨道与所述第二组同向轨道的传送方向相反设置。
33、在其中一个实施例中,所述便于更换装载容器的轨道系统还包括设置于所述机架上的转向换轨机构,所述转向换轨机构位于所述轨道传送机构上;
34、所述转向换轨机构配合所述传感控制机构及所述读取识别机构,将所述轨道传送机构上的装载容器换轨以改变输送方向。
35、在其中一个实施例中,所述转向换轨机构包括第一转向引导结构、第二转向引导结构及第三容纳转动机构;
36、所述第三容纳转动机构邻近所述第二轨道的输出端及所述第三轨道的输入端;
37、所述第一转向引导结构设置于所述第一轨道及所述第二轨道之间且邻近所述第三容纳转动机构,所述第二转向引导结构设置于所述第二轨道及所述第三轨道之间且邻近所述第三容纳转动机构,所述第一转向引导结构及所述第二转向引导结构相配合以偏转所述第二轨道上的所述装载容器;
38、所述传感控制机构包括邻近所述第二轨道及所述第三容纳转动机构的第九传感器,所述第九传感器设置为确定在所述第二轨道上的所述装载容器经过的状态下,使能所述第三容纳转动机构;
39、所述第三容纳转动机构设置为以转动方式至少部分容纳被所述第一转向引导结构及所述第二转向引导结构配合偏转的所述装载容器,且将所述装载容器换轨至所述第三轨道上;
40、所述传感控制机构包括邻近所述第三轨道的第十传感器,所述第十传感器设置为确定在所述第三轨道上的所述装载容器的状态,复位所述第三容纳转动机构。
41、在其中一个实施例中,所述第二同向换轨机构包括相邻近的第二容纳转动机构及第二转动导轨机构;
42、所述传感控制机构包括邻近所述第一轨道的第七传感器及邻近所述第二轨道的第六传感器,所述第七传感器设置为确定在所述第一轨道上传送的所述装载容器的状态,使能所述第二容纳转动机构,所述第六传感器设置为确定在所述第二轨道上传送的所述装载容器的状态,使能所述第二容纳转动机构;
43、所述读取识别机构包括邻近所述第一轨道的第四读取器及邻近所述第二轨道的第三读取器,所述第三读取器及所述第四读取器均设置为确定所述装载容器的目标路径;
44、所述第二转动导轨机构设置为根据所述目标路径导通所述第一轨道或所述第二轨道;
45、对于所述装载容器中的正常装载容器,所述第二容纳转动机构设置为以转动方式避位以放行所述第二轨道上的所述正常装载容器,或以转动方式至少部分容纳所述第一轨道上的所述正常装载容器,配合所述第二转动导轨机构将所述第一轨道上的所述正常装载容器换轨至所述第二轨道上;
46、对于所述装载容器中的故障装载容器,所述第二容纳转动机构设置为以转动方式避位以放行所述第一轨道上的所述故障装载容器,或以转动方式至少部分容纳所述第二轨道上的所述故障装载容器配合所述第二转动导轨机构将所述第二轨道上的所述故障装载容器换轨至所述第一轨道上,以使所述故障装载容器进入所述故障装载容器缓存区中;
47、所述传感控制机构包括邻近所述故障装载容器缓存区的第八传感器,所述第八传感器设置为确定所述故障装载容器经过的状态下,复位所述第二容纳转动机构及所述第二转动导轨机构;
48、所述传感控制机构包括邻近所述第二轨道及所述第二转动导轨机构的第五传感器,所述第五传感器设置为确定所述第二轨道上的所述正常装载容器经过的状态下,复位所述第二容纳转动机构及所述第二转动导轨机构;
49、所述便于更换装载容器的轨道系统还包括设置于所述机架上的转向换轨机构,所述转向换轨机构包括位于所述轨道传送机构上的第一转向引导结构、第二转向引导结构、第三容纳转动机构;
50、所述第三容纳转动机构邻近所述第二轨道的输出端及所述第三轨道的输入端;
51、所述第一转向引导结构设置于所述第一轨道及所述第二轨道之间且邻近所述第三容纳转动机构,所述第二转向引导结构设置于所述第二轨道及所述第三轨道之间且邻近所述第三容纳转动机构,所述第一转向引导结构及所述第二转向引导结构相配合以偏转所述第二轨道上的所述装载容器;
52、所述传感控制机构包括邻近所述第二轨道及所述第三容纳转动机构的第九传感器,所述第九传感器设置为确定在所述第二轨道上的所述装载容器经过的状态下,使能所述第三容纳转动机构;
53、所述第三容纳转动机构设置为以转动方式至少部分容纳被所述第一转向引导结构及所述第二转向引导结构配合偏转的所述装载容器,且将所述装载容器换轨至所述第三轨道上;
54、所述传感控制机构包括邻近所述第三轨道的第十传感器,所述第十传感器设置为确定在所述第三轨道上的所述装载容器的状态,复位所述第三容纳转动机构。
- 还没有人留言评论。精彩留言会获得点赞!