用于消毒供应中心的多臂协作智能打包机器人的制作方法
本发明涉及医疗器械,具体地说,尤其涉及一种用于消毒供应中心的多臂协作智能打包机器人。
背景技术:
1、当前医院消毒供应中心已经进入了布局基本合理、设备较为先进、管理趋于科学、质量基本可控的时代,但随着目前社会劳动力日益稀缺,用工成本逐渐升高等问题的出现以及智能化、自动化等技术的不断成熟与应用,通过智能化设备来降低用工成本,提高管理效率,实现医院消毒供应中心的智慧化已成行业共识,其中实现最终灭菌物品的自动化包装是智慧化消毒供应中心里的一个重要环节。
2、目前最终灭菌物品的包装材料多采用医用无纺布,但使用医用无纺布包装最终灭菌物品目前仍然需要人工操作,而大部分最终灭菌物品为金属制品,且基本都装载于金属器械筐中,其质量及体积较大,且包装过程较为繁琐,并且由于操作人员技能水平问题,导致包装质量参差不齐,并且包装过程中操作人员会与最终灭菌物品接触,存在二次污染风险。
3、现有技术中公开号为cn115196073a的申请公开了一种消毒供应中心智能打包机器人,其包括主体框架、打包台、拾取布料装置、抓取传送装置和打包装置,打包台设置在主体框架内,主体框架上方左右两侧分别平行设置有第十直线模组和第十一直线模组,拾取布料装置包括支架、料盘、第一直线模组、气缸、横梁、连接杆、弯钩和吸盘;但其采用的是单机械臂控制和定点输出,通过多轴直线模组配合专用夹具实现无纺布的取料,折叠,封包,贴胶等操作,体积大,灵活性不足。
4、本产品可以根据待灭菌物品所用器械筐的尺寸自动选择合适尺寸的无纺布,进行无纺布的折叠,封包,贴标签等操作,实现自动化打包,并可将包装完毕的器械包放至指定位置,本产品可有效节约劳动力,提高包装效率与包装质量,降低操作人员的劳动强度,有效避免人工操作时的二次污染风险。
技术实现思路
1、本发明的目的,在于提供一种用于消毒供应中心的多臂协作智能打包机器人,以解决现有技术中灭菌物品打包过程繁琐,操作人员的劳动强度大、效率低的问题。
2、本发明是通过以下技术方案实现的:
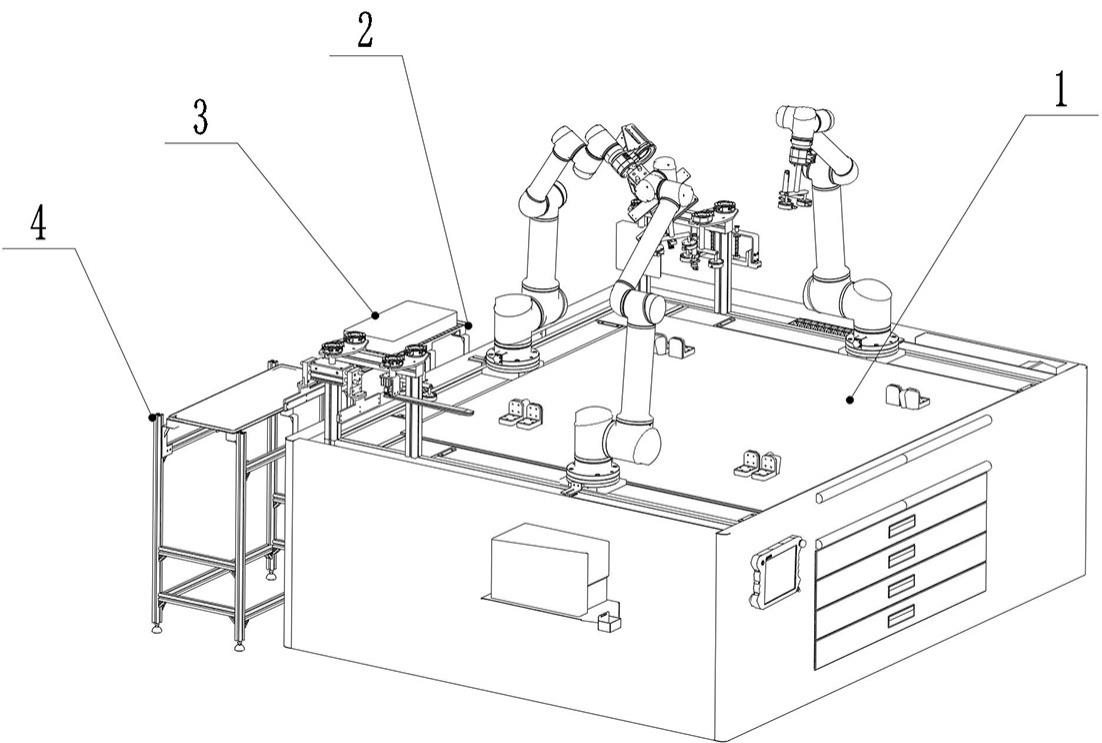
3、1、一种用于消毒供应中心的多臂协作智能打包机器人,包括主体框架、清洗托盘缓存台、灭菌托盘缓存台和器械筐,其特征在于:所述主体框架上设有无纺布供料机构、纸胶带供料机构、标签打印机、工作台、机械臂机构和总控制柜;所述机械臂机构包括多个,多个机械臂机构设置在工作台上,多个机械臂机构连接有机械臂控制箱和行走系统;各个机械臂机构均包括机械臂、快换装置和工作夹具,机械臂通过快换装置连接工作夹具实现工作夹具的切换,所述快换装置包括主盘和副盘,主盘和副盘连接配合,副盘设置在工作夹具上,所述主盘和夹具之间设有动作检测机构,所述动作检测机构用于识别主盘连接的工作夹具类型是否符合工作过程,所述机械臂上设有视觉识别引导系统;所述视觉识别引导系统用于识别器械筐及引导各个机械臂本体到达相应工作位置;所述的工作台上设有夹包系统,所述夹包系统包括若干夹紧块和电动执行器ⅰ,若干夹紧块通过联动块连接有电动执行器ⅰ;所述机械臂控制箱、动作检测机构、视觉识别引导系统、标签打印机和夹包系统均连接于总控制柜。
4、进一步地,所述的夹紧块包括夹布块和收布块,夹紧块通过联动块连接有电动执行器ⅰ,电动执行器ⅰ设于固定板下方;收布块连接联动块,联动块连接有电动推杆。采用夹紧块于收布块配合的方式,可对不同规格的器械包进行夹持固定,夹包功能可以将灭菌物品夹紧,并且使得无纺布的形态位置达到理想的打包效果。
5、进一步地,所述的工作台上设有固定板,所述夹包系统设置在固定板上,固定板的材质为玻璃,夹紧块的材质为金属铁,联动块的材质为磁铁,夹紧块与联动块隔着固定板磁性连接。
6、进一步地,所述的机械臂包括机械臂ⅰ、机械臂ⅱ和机械臂ⅲ,通过机械臂ⅰ、机械臂ⅱ和机械臂ⅲ辅助工作夹具相互协作完成取医用无纺布、无纺布折叠、取胶带、封包、贴标工序。所述的机械臂采用六自由度机械臂。三个机械臂相互协作完成各打包工序,灵活调整无纺布打包折叠动作及步骤,以适应不同的打包方式要求。
7、进一步地,所述的工作夹具包括吸夹布夹具、器械筐夹具、长边折布夹具、短边折布夹具、贴纸胶带夹具、贴标签夹具和压插布夹具;本装置可根据各步工序的需求自动切换机械臂末端夹具。
8、进一步地,所述的贴纸胶带夹具包括弹性件和固定板,弹性件连接固定板,固定板上设有微型真空发生器,微型真空发生器上设有纸胶带吸嘴;贴标签夹具包括标签吸嘴,标签吸嘴通过支架连接副盘;吸夹布夹具包括拇指气缸,拇指气缸通过支架连接副盘;压插布夹具包括插压板,插压板通过支架连接副盘;器械筐夹具包括双向气缸,双向气缸通过支架连接副盘,双向气缸上设有夹板;长边折布夹具包括双向气缸,双向气缸通过支架连接副盘,双向气缸上设有长板;短边折布夹具包括双向气缸,双向气缸通过支架连接副盘,双向气缸上设有短板;不同工序的需求可自动切换各种专用夹具。
9、进一步地,所述的无纺布供料机构包括无纺布料盒和步进电机,无纺布料盒设有若干无纺布料层,所述的若干无纺布料层分别通过滚珠丝杠连接步进电机。在步进电机的驱动下,自动上料系统可以根据整机调度系统的命令将规定尺寸的无纺布料盒伸到取布位置。机械臂带着相应的取布夹具完成自动吸布、夹布、自动摆放等一系列动作。
10、进一步地,所述的纸胶带供料机构包括电动执行器ⅲ、纸胶带机和纸胶带,电动执行器ⅲ上设有纸胶带夹,纸胶带夹连接纸胶带的一端,纸胶带另一端连接在纸胶带机内;纸胶带供料机构根据需求为封包工序提供合适尺寸的纸胶带。
11、进一步地,所述的器械筐上设有条码标签,视觉识别引导系统包括摄像头,摄像头与条码标签配合,摄像头连接总控制柜,总控制柜连接标签打印机;本装置可通过视觉识别引导系统自动定位器械筐位置、自动识别条形码信息,准确高效。
12、进一步地,所述的压缩气源机构与快换装置之间设有阀岛模块,阀岛模块包括普通型阀岛和保持型阀岛,普通型阀岛和保持型阀岛串联;采用串联的方式,在更换夹具时提前将气源断开,避免产生漏气和噪音。
13、与现有技术相比,本发明的有益效果是:
14、1、本发明采用三个机械臂辅助各种专用夹具相互协作完成各个打包、封包、贴标签动作,三个机械臂相互协作完成各打包工序,灵活调整无纺布打包折叠动作及步骤,可以适应不同的打包方式要求。
15、2、本发明设有多层的无纺布料盒,可以根据待灭菌物品所用器械筐的尺寸自动选择合适尺寸的无纺布,进行无纺布的折叠,封包的操作,实现自动化打包,并可将包装完毕的器械包放至指定位置。
16、3、本发明可通过视觉识别引导系统智能引导机械臂抓取器械筐或包装完毕的器械包至指定位置,还可以通过视觉识别引导系统进行自动识别条形码信息,并通过机械臂配合夹具进行贴标签的操作。
17、4、本发明设有纸胶带供料机构,通过纸胶带供料机构根据需求为封包工序提供合适尺寸的纸胶带。
18、5、本发明可有效节约劳动力,提高包装效率与包装质量,降低操作人员的劳动强度,有效避免人工操作时的二次污染风险。
- 还没有人留言评论。精彩留言会获得点赞!