法兰叉头的抓取工装、上下法兰叉头的设备及方法与流程
本发明涉及法兰叉头的抓取工装、上下法兰叉头的设备及方法,属于冶金行业产线使用的装备。
背景技术:
1、由于法兰叉头的规格都较大且重量较重,通过人工上下法兰叉头太累,因此目前车间机床加工法兰叉头时的上下料的具体方法是:先使用行车将待加工法兰叉从放置待加工件的托盘上吊至机床对准机床上安装位进行放置,当法兰叉头加工完毕后,人工将法兰叉头拆卸再使用行车从机床安装位吊至放置已加工件的托盘上。此种方法的缺点是:一、人工操作行车吊装法兰叉头危险系数高、容易发生事故,同时速度慢、耗费时间长;二、人工对工件摆放、拆卸定位精度不够,容易损坏设备或工件。
技术实现思路
1、本发明所要解决的问题是提供法兰叉头的抓取工装、上下法兰叉头的设备,本发明上下法兰叉头的设备通过抓取工装可以实现将待加工托盘上的法兰叉头抓取并放置到车床加工处,并在法兰叉头加工完成后又通过机器人将法兰叉头抓取并放置到已加工托盘上。因此,本发明危险系数低、不会发生事故,且速度快耗费时间短。同时,本发明公开了上下法兰叉头的方法。
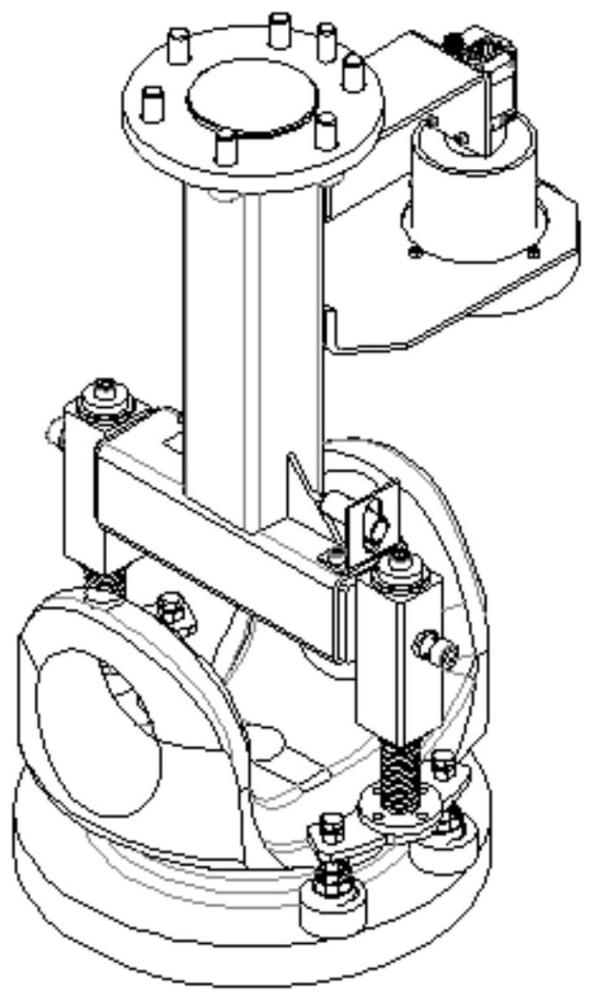
2、本发明法兰叉头的抓取工装,它包括夹具本体、左右两个抓取组件,夹具本体左右对称,由上面的长竖杆、中间的横杆、下面的左右两个小竖杆组成,左右两个抓取组件分别与左右两个小竖杆连接;每个抓取组件包括滑动单元、连接块、两个吸附单元,滑动单元的上部与小竖杆连接,下部与连接块的中间连接,两个吸附单元对称地连接在连接块下面的前后两部。
3、进一步地,滑动单元包括压紧块、滑动杆、弹簧、上下两个铜套,滑动杆的上部位于小竖杆的孔内、下部与连接块的中间连接,上下两个铜套设置在小竖杆的上下端与滑动杆之间,其内孔、外圆分别与滑动杆的外圆、小竖杆的内孔配合,其台阶面压紧小竖杆的端面,上面的铜套的上端面设置有压紧块,紧固件将压紧块与滑动杆连接;弹簧套在滑动杆中部的外面,其上下端面分别与下面的铜套、滑动杆底部的上平面接触。
4、进一步地,滑动单元还包括锁紧螺钉,小竖杆的侧壁上设置有螺孔,锁紧螺钉从螺孔中伸出后压紧滑动杆的外圆。
5、进一步地,每个吸附单元包括电磁吸盘、截锥弹簧、六角螺栓,六角螺栓穿过连接块与下部的电磁吸盘连接,截锥弹簧套在六角螺栓中间杆部的外面、其上下端面分别与连接块、电磁吸盘接触,六角螺栓的上部通过螺母并紧。
6、进一步地,抓取工装还包括支架ⅰ、接近开关,支架ⅰ固定在横杆的上面,接近开关与长竖杆连接、其头部从支架ⅰ的孔内伸出后位于压紧块的侧上方。
7、本发明上下法兰叉头的设备,它包括法兰叉头的抓取工装,还包括机器人、视觉系统,视觉系统包括相机、环形光源、支架ⅱ、支架ⅲ,相机、环形光源分别通过支架ⅱ、支架ⅲ与夹具本体的长竖杆连接且平行于长竖杆。
8、本发明上下法兰叉头的方法,其步骤是:一、将摆放好待加工法兰叉头的托盘运输至待加工位;二、机器人收到启动信号后移动至待加工法兰叉头的托盘上方检测位,相机进行首次拍摄进行视觉试别,将法兰叉头的整体坐标信息传送至机器人,机器人接受到信号后移动至要抓取的法兰叉头上方,相机进行二次拍摄进行视觉试别,将法兰叉头的光滑面的坐标信息传送至机器人,机器人接受到信号后旋转工装使电磁吸盘对准法兰叉头的光滑面;三、机器人控制抓取工装下降,当电磁吸盘顶住法兰叉头的光滑面时,滑动杆向上滑动,当接近开关感应到信号时,判断电磁吸盘已完全压紧法兰叉头,控制电磁吸盘通电,吸附住法兰叉头;四、机器人控制抓取工装上升,根据设定轨迹将法兰叉头移动至加工位;五、机器人控制抓取工装下降,滑动杆向上滑动,当接近开关感应到信号时,判断法兰叉头已完全放置在加工位上,控制电磁吸盘断电,释放开法兰叉头;六、机器人回到原位,等法兰叉头加工好后,机器人将法兰叉头从加工位进行抓取并放置到存放已加工好的法兰叉头的托盘的上面;七、已加工托盘上的法兰叉头全部放置完成后,将托盘移动至指定位置。
9、本发明中的机器人通过抓取工装实现了对法兰叉头的可靠抓取和释放,从而实现将待加工托盘上的法兰叉头抓取并放置到车床加工处,并在法兰叉头加工完成后又通过机器人将法兰叉头抓取并放置到已加工托盘上。因此,本发明危险系数低、不会发生事故,且速度快耗费时间短。同时,机器人通过抓取工装保证了工件摆放、拆卸定位的精度,保护了工件和设备。
技术特征:
1.法兰叉头的抓取工装,其特征是:它包括夹具本体(100)、左右两个抓取组件,夹具本体(100)左右对称,由上面的长竖杆、中间的横杆、下面的左右两个小竖杆组成,左右两个抓取组件分别与左右两个小竖杆连接;每个抓取组件包括滑动单元、连接块(108)、两个吸附单元,滑动单元的上部与小竖杆连接,下部与连接块(108)的中间连接,两个吸附单元对称地连接在连接块(108)下面的前后两部。
2.根据权利要求1所述的抓取工装,其特征是:滑动单元包括压紧块(101)、滑动杆(102)、弹簧(103)、上下两个铜套(104),滑动杆(102)的上部位于小竖杆的孔内、下部与连接块(108)的中间连接,上下两个铜套(104)设置在小竖杆的上下端与滑动杆(102)之间,其内孔、外圆分别与滑动杆(102)的外圆、小竖杆的内孔配合,其台阶面压紧小竖杆的端面,上面的铜套(104)的上端面设置有压紧块(101),紧固件将压紧块(101)与滑动杆(102)连接;弹簧(103)套在滑动杆(102)中部的外面,其上下端面分别与下面的铜套(104)、滑动杆(102)底部的上平面接触。
3.根据权利要求2所述的抓取工装,其特征是:滑动单元还包括锁紧螺钉(105),小竖杆的侧壁上设置有螺孔,锁紧螺钉(105)从螺孔中伸出后压紧滑动杆(102)的外圆。
4.根据权利要求1所述的抓取工装,其特征是:每个吸附单元包括电磁吸盘(106)、截锥弹簧(107)、六角螺栓(109),六角螺栓(109)穿过连接块(108)与下部的电磁吸盘(106)连接,截锥弹簧(107)套在六角螺栓(109)中间杆部的外面、其上下端面分别与连接块(108)、电磁吸盘(106)接触,六角螺栓(109)的上部通过螺母并紧。
5.根据权利要求2所述的抓取工装,其特征是:抓取工装还包括支架ⅰ(110)、接近开关(111),支架ⅰ(110)固定在横杆的上面,接近开关(111)与长竖杆连接、其头部从支架ⅰ(110)的孔内伸出后位于压紧块(101)的侧上方。
6.上下法兰叉头的设备,其特征是:它包括权利要求1-5任一所述的法兰叉头的抓取工装(1),还包括机器人(3)、视觉系统(4),视觉系统包括相机(41)、环形光源(42)、支架ⅱ(43)、支架ⅲ(44),相机(41)、环形光源(42)分别通过支架ⅱ(43)、支架ⅲ(44)与夹具本体(100)的长竖杆连接且平行于长竖杆。
7.上下法兰叉头的方法,其步骤是:一、将摆放好待加工法兰叉头的托盘运输至待加工位;二、机器人收到启动信号后移动至待加工法兰叉头的托盘上方检测位,相机进行首次拍摄进行视觉试别,将法兰叉头的整体坐标信息传送至机器人,机器人接受到信号后移动至要抓取的法兰叉头上方,相机进行二次拍摄进行视觉试别,将法兰叉头的光滑面的坐标信息传送至机器人,机器人接受到信号后旋转工装使电磁吸盘对准法兰叉头的光滑面;三、机器人控制抓取工装下降,当电磁吸盘顶住法兰叉头的光滑面时,滑动杆向上滑动,当接近开关感应到信号时,判断电磁吸盘已完全压紧法兰叉头,控制电磁吸盘通电,吸附住法兰叉头;四、机器人控制抓取工装上升,根据设定轨迹将法兰叉头移动至加工位;五、机器人控制抓取工装下降,滑动杆向上滑动,当接近开关感应到信号时,判断法兰叉头已完全放置在加工位上,控制电磁吸盘断电,释放开法兰叉头;六、机器人回到原位,等法兰叉头加工好后,机器人将法兰叉头从加工位进行抓取并放置到存放已加工好的法兰叉头的托盘的上面;七、已加工托盘上的法兰叉头全部放置完成后,将托盘移动至指定位置。
技术总结
本发明公开了法兰叉头的抓取工装,它包括夹具本体、左右两个抓取组件,夹具本体左右对称,由上面的长竖杆、中间的横杆、下面的左右两个小竖杆组成,左右两个抓取组件分别与左右两个小竖杆连接;每个抓取组件包括滑动单元、连接块、两个吸附单元,滑动单元的上部与小竖杆连接,下部与连接块的中间连接,两个吸附单元对称地连接在连接块下面的前后两部。本发明抓取工装可以实现将待加工托盘上的法兰叉头抓取并放置到车床加工处,并在法兰叉头加工完成后又通过机器人将法兰叉头抓取并放置到已加工托盘上。因此,本发明危险系数低、不会发生事故,且速度快耗费时间短。
技术研发人员:杨云卿,黄骏,孙龙,汤传
受保护的技术使用者:安徽燊泰智能设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!