一种绝缘斗臂车及其操作平台的制作方法
本发明属于电力作业,具体涉及一种绝缘斗臂车及其操作平台。
背景技术:
1、目前可用于高空带电检修作业的登高工具主要是绝缘斗臂车,绝缘斗臂车是带有工作斗、绝缘臂、液压控制系统的高空作业车,进入作业位置可以避免高空坠落的危险,同时减少作业人员的劳动强度,提高了作业效率、降低了作业风险。绝缘斗臂车在国内外已经广泛使用,其绝缘性和机动性大大提高了作业的安全性和工作效率。
2、随着技术的发展,绝缘斗臂车越来越智能化,大多采用电控系统来控制臂架的动作,而操作人员只需在操作平台上操作就可以完成臂架的动作操控。然而,随着绝缘斗臂车的大面积使用,操作者大多数都没有熟练的操作经验,且现在的绝缘斗臂车操作平台上的操作开关都是可连续调节的开关,于是当某个操作不能进行时操作者很难立即得知,从而会继续对操作开关进行调节,增加了工作人员的工作难度,导致操作效率低,更为严重的会出现安全隐患。
技术实现思路
1、本发明的目的在于提供一种绝缘斗臂车及其操作平台,用以解决现有技术中绝缘斗臂车的操作平台不能让工作人员快速获取绝缘斗臂车是否能继续进行操作,导致操作效率和安全性低的问题。
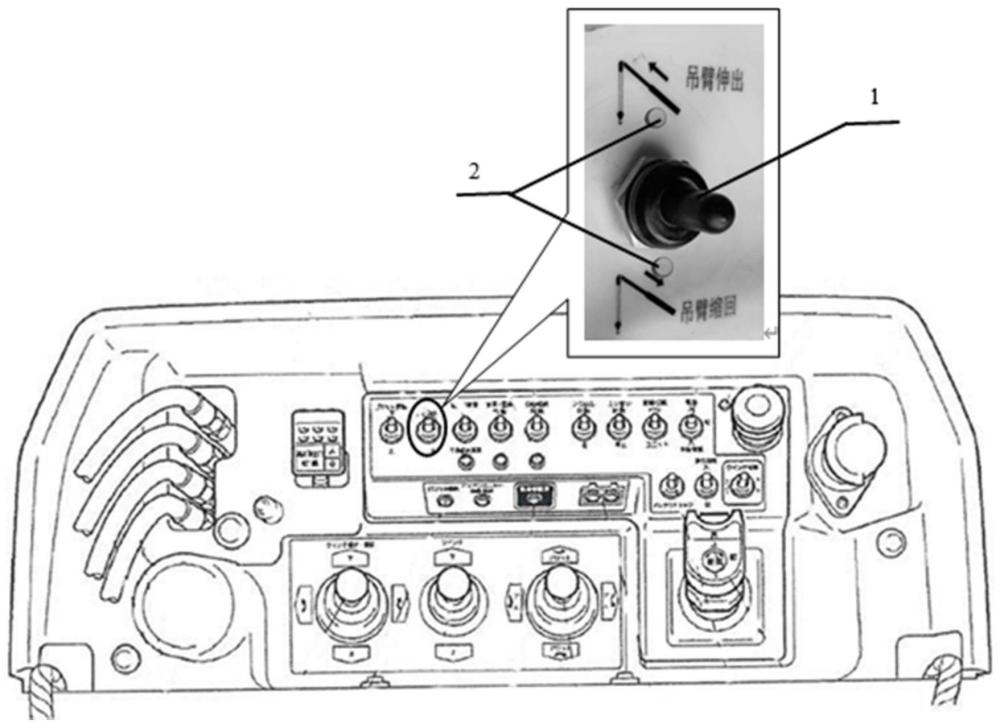
2、为解决上述技术问题,本发明提供了一种绝缘斗臂车操作平台,操作平台包括控制模块和若干操作开关,控制模块与各个操作开关均连接以获取操作人员的操作指令,操作平台还包括与各操作开关相对应的操作提示灯,控制模块与各个操作提示灯均连接,以在操作开关控制绝缘斗臂车执行某一动作且到达操作极限,所述操作极限指的是某一动作的机械限位或该动作继续执行会使绝缘斗臂车发生危险时,控制相应的操作提示灯进行警示。
3、其有益效果为:为解决现有技术中绝缘斗臂车的操作平台不能让工作人员快速获取绝缘斗臂车是否能继续进行操作,导致操作效率和安全性低的问题,本发明通过在操作平台上设置与各操作开关对应的操作提示灯来表示绝缘斗臂车是否到达操作极限,以使操作人员简单快速的判断出当前控制开关是否可以控制绝缘斗臂车继续进行操作,以达到迅速判断操作的可行性,提高斗臂车的安全性,提高了操作的简便性,同时还提高了斗臂车操作效率。
4、进一步地,控制模块还用于在绝缘斗臂车执行某一动作且到达操作极限时,且获取到操作人员的操作指令为使绝缘斗臂车按原动作执行时,控制绝缘斗臂车不执行该操作指令。
5、其有益效果为:从软件程序上对绝缘斗臂车在到达操作极限后进行限制,进一步保证绝缘斗臂车具有高安全性。
6、进一步地,操作开关包括钮子开关和操作手柄。
7、其有益效果为:避免由于操作开关为钮子开关和操作手柄等连续调节的开关,操作人员不能直观的知晓改正开关的行程所对应的斗臂车的动作位置,进一步保证了斗臂车的安全性,且提高了操作的简便性。
8、进一步地,绝缘斗臂车在未到达操作极限时与到达操作极限时的操作指示灯的颜色不同。
9、其有益效果为:操作提示灯在受限制时通过灯光的改变使操作人员更加容易注意到,以使操作人员更清楚的即时了解绝缘斗臂车的状态。
10、为解决上述技术问题,本发明还提供了一种绝缘斗臂车,该绝缘斗臂车包括操作平台,操作平台包括控制模块和若干操作开关,控制模块与各个操作开关均连接以获取操作人员的操作指令,其特征在于,该操作平台还包括与控制模块均连接的若干操作提示灯,用于通过操作开关控制绝缘斗臂车执行某一动作且到达操作极限,所述操作极限是指该动作的机械限位或该动作继续执行会使绝缘斗臂车发生危险时,警示操作人员不要继续操作该操作开关的若干操作提示灯。
11、其有益效果为:该装置保证了操作平台的有效可靠执行,进而提高斗臂车的安全性,提高了操作的简便性,同时还提高了斗臂车操作效率。
12、进一步地,控制模块还用于在绝缘斗臂车执行某一动作且到达操作极限时,且获取到操作人员的操作指令为使绝缘斗臂车按原动作执行时,控制绝缘斗臂车不执行该操作指令。
13、其有益效果为:从软件程序上对绝缘斗臂车在到达操作极限后进行限制,进一步保证绝缘斗臂车具有高安全性。
14、进一步地,操作开关包括钮子开关和操作手柄。
15、其有益效果为:避免由于操作开关为钮子开关和操作手柄等连续调节的开关,操作人员不能直观的知晓改正开关的行程所对应的斗臂车的动作位置,进一步保证了斗臂车的安全性,且提高了操作的简便性。
16、进一步地,绝缘斗臂车在未到达操作极限时与到达操作极限时的操作指示灯的颜色不同。
17、其有益效果为:操作提示灯在受限制时通过灯光的改变使操作人员更加容易注意到,以使操作人员更清楚的即时了解绝缘斗臂车的状态。
技术特征:
1.一种绝缘斗臂车操作平台,操作平台包括控制模块和若干操作开关,控制模块与各个操作开关均连接以获取操作人员的操作指令,其特征在于,还包括与各操作开关相对应的操作提示灯,控制模块与各个操作提示灯均连接,以在操作开关控制绝缘斗臂车执行某一动作且到达操作极限,所述操作极限指的是某一动作的机械限位或该动作继续执行会使绝缘斗臂车发生危险时,控制相应的操作提示灯进行警示。
2.根据权利要求1所述的绝缘斗臂车操作平台,其特征在于,控制模块还用于在绝缘斗臂车执行某一动作且到达操作极限时,且获取到操作人员的操作指令为使绝缘斗臂车按原动作执行时,控制绝缘斗臂车不执行该操作指令。
3.根据权利要求1所述的绝缘斗臂车操作平台,其特征在于,操作开关包括钮子开关和操作手柄。
4.根据权利要求1-3任一项所述的绝缘斗臂车操作平台,其特征在于,绝缘斗臂车在未到达操作极限时与到达操作极限时的操作指示灯的颜色不同。
5.一种绝缘斗臂车,该绝缘斗臂车包括操作平台,操作平台包括控制模块和若干操作开关,控制模块与各个操作开关均连接以获取操作人员的操作指令,其特征在于,该操作平台还包括与控制模块均连接的若干操作提示灯,用于通过操作开关控制绝缘斗臂车执行某一动作且到达操作极限,所述操作极限是指该动作的机械限位或该动作继续执行会使绝缘斗臂车发生危险时,警示操作人员不要继续操作该操作开关的若干操作提示灯。
6.根据权利要求5所述的绝缘斗臂车,其特征在于,控制模块还用于在绝缘斗臂车执行某一动作且到达操作极限时,且获取到操作人员的操作指令为使绝缘斗臂车按原动作执行时,控制绝缘斗臂车不执行该操作指令。
7.根据权利要求5所述的绝缘斗臂车,其特征在于,操作开关包括钮子开关和操作手柄。
8.根据权利要求5-7任一项所述的绝缘斗臂车,其特征在于,绝缘斗臂车在未到达操作极限时与到达操作极限时的操作指示灯的颜色不同。
技术总结
本发明属于电力作业技术领域,具体涉及一种绝缘斗臂车及其操作平台。为解决现有技术中绝缘斗臂车的操作平台不能让工作人员快速获取绝缘斗臂车是否能继续进行操作,导致操作效率和安全性低的问题,本发明通过在操作平台上设置与各操作开关对应的操作提示灯来表示绝缘斗臂车是否到达操作极限,以使操作人员简单快速的判断出当前控制开关是否可以控制绝缘斗臂车继续进行操作,以达到迅速判断操作的可行性,提高斗臂车的安全性,提高了操作的简便性,同时还提高了斗臂车操作效率。
技术研发人员:张志彬,夏天元,张亮,田敬中,郭红起,孙鹏程,朱飞,王红利,黄晔矿,李居义,葛光胜,卢果,陈景桥,张伟峰,魏少楠,陈俊凯
受保护的技术使用者:许继时代技术有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!