播种控制方法、播种系统及工作站与流程
本发明实施例涉及智能仓储,具体涉及一种播种控制方法、播种系统及工作站。
背景技术:
1、随着物流业的快速发展和智能化的不断提高,货物流转的效率不断提升。例如,在智能仓储领域,可以利用播种法将多个订单集中到一起,批量拣货,然后再分拣成单独的发货单,这样可以使需要拣的货物均匀分布在整个库房中,拣货只需要在这一个库房中进行,所以能够提高拣货的效率。
2、在货物出库或上架时,可以由用户将货物按照种类和数量进行分类,使得货物种类和数量满足每个订单的要求。然而,这种方法主要依赖于人工,在货物数量较大时,拣货的效率会比较低,耗费的成本也比较高。
技术实现思路
1、鉴于上述问题,本发明实施例提供了一种播种控制方法、播种系统及工作站,用于解决现有技术中存在的拣货效率较低的问题。
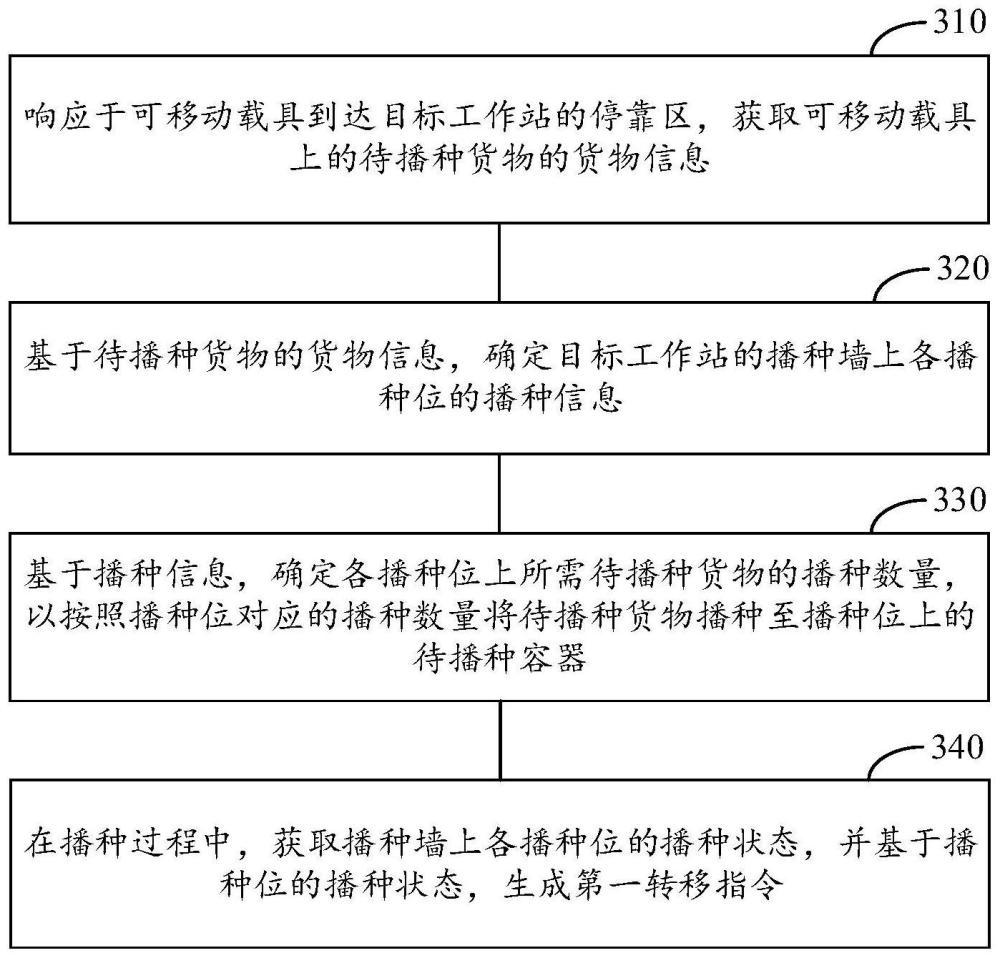
2、根据本发明实施例的一个方面,提供了一种播种控制方法,所述方法包括:响应于可移动载具到达目标工作站的停靠区,获取所述可移动载具上的待播种货物的货物信息;基于所述待播种货物的货物信息,确定所述目标工作站的播种墙上各播种位的播种信息,其中,所述播种位的播种信息包括所述待播种货物在所述播种位上的播种数量;基于所述播种信息,确定所述各播种位上所需所述待播种货物的播种数量,以按照所述播种位对应的播种数量将所述待播种货物播种至所述播种位上的待播种容器;在播种过程中,获取所述播种墙上各所述播种位的播种状态,并基于所述播种位的播种状态,生成第一转移指令;所述第一转移指令用于指示所述目标工作站将完成播种的已播种容器转移至目标载具。
3、在一些实施例中,所述响应于可移动载具到达目标工作站的停靠区,获取所述可移动载具上的待播种货物的货物信息,包括:在所述可移动载具到达所述目标工作站的停靠区时,根据播种系统中各待播种任务的任务信息,确定所述可移动载具上的所述待播种货物的货物信息,所述待播种任务的任务信息包括待播种货物的货物信息;或者,在所述可移动载具到达所述目标工作站的停靠区时,响应于货物信息输入装置对可移动载具上的待播种货物的识别操作,获取所述待播种货物的货物信息。
4、在一些实施例中,在响应于可移动载具到达目标工作站的停靠区,获取所述可移动载具上的待播种货物的货物信息之前,所述方法还包括:获取待处理订单,所述待处理订单包括多种货物的货物信息;基于所述多种货物的货物信息,确定所述目标工作站的待播种货物,并基于所述目标工作站的待播种货物,生成搬运指令;所述搬运指令用于指示搬运机器人将放置所述待播种货物的所述可移动载具搬运至所述目标工作站的停靠区。
5、在一些实施例中,所述基于所述多种货物的货物信息,确定所述目标工作站的待播种货物,包括:基于所述多种货物的货物信息,确定所述多种货物的关联度;基于所述多种货物的关联度,将所述多种货物中关联度大于关联度阈值的至少两种货物确定为所述目标工作站的待播种货物。
6、在一些实施例中,所述可移动载具至少包括第一载具和第二载具,所述目标工作站的待播种货物至少包括第一待播种货物和第二待播种货物;所述基于所述目标工作站的待播种货物,生成搬运指令,包括:基于所述第一待播种货物生成第一搬运指令,所述第一搬运指令用于指示搬运机器人将放置所述第一待播种货物的所述第一载具搬运至所述目标工作站的停靠区的一侧;基于所述第二待播种货物生成第二搬运指令,所述第二搬运指令用于指示搬运机器人将放置所述第二待播种货物的所述第二载具搬运至所述目标工作站的停靠区的另一侧。
7、在一些实施例中,所述方法还包括:在所述目标工作站的播种墙上开始播种所述第一待播种货物前,向搬运机器人发送所述第二搬运指令,以将所述第二载具搬运至所述目标工作站的停靠区的另一侧,并对所述第二载具上的所述第二待播种货物进行播种;或者,在所述目标工作站的播种墙上播种所述第一待播种货物时,向搬运机器人发送所述第二搬运指令,以将所述第二载具搬运至所述目标工作站的停靠区的另一侧,并对所述第二载具上的所述第二待播种货物进行播种。
8、在一些实施例中,在所述播种墙上播种所述第一待播种货物的播种方向为第一方向,在所述播种墙上播种所述第二待播种货物的播种方向为第二方向,所述第一方向和所述第二方向不同。
9、在一些实施例中,所述方法还包括:根据所述播种墙上各播种位对应的待播种货物的种类数量,确定待播种货物的种类数量最少的目标播种位对应的待播种货物;确定放置所述目标播种位对应的待播种货物的可移动载具,并基于所述可移动载具生成载具搬运指令;所述载具搬运指令用于指示搬运机器人将放置所述目标播种位对应的待播种货物的可移动载具搬运至所述目标工作站的停靠区。
10、在一些实施例中,所述目标工作站设置有输出装置,所述输出装置用于输出待播种货物对应的播种数量,所述基于所述播种信息,确定所述各播种位上所需所述待播种货物的播种数量,包括:基于所述播种信息,确定所述待播种货物在所述播种墙上的播种总数量,以及在所述播种墙的各所述播种位上的播种数量;控制所述目标工作站的显示装置显示所述待播种货物在所述播种墙上的播种总数量;在所述待播种货物在播种位上的播种数量大于零的情况下,控制所述输出装置输出所述待播种货物在所述播种位上的播种数量。
11、在一些实施例中,所述获取所述播种墙上各所述播种位的播种状态,包括:响应于用户在所述播种位播种完任意一种待播种货物时触发的播种完成操作,确定所述播种位上的所述任意一种待播种货物播种完成;或者,响应于检测装置检测到所述播种位完成任意一种待播种货物的播种,确定所述播种位上的所述任意一种待播种货物播种完成;在所述播种位的全部待播种货物播种完成时,确定所述播种位的播种状态为播种完成状态。
12、在一些实施例中,所述响应于用户在所述播种位播种完任意一种待播种货物时触发的播种完成操作,确定所述播种位上的所述任意一种待播种货物播种完成,包括:在所述播种位播种完任意一种待播种货物时,响应于用户在所述播种位的播种控制装置上触发的播种完成操作,或者,响应于用户在电子设备的显示屏上对所述播种位对应的控件触发的播种完成操作,确定所述播种位上的所述任意一种待播种货物播种完成。
13、在一些实施例中,所述基于所述播种位的播种状态,生成所述第一转移指令,包括:在所述播种墙上的全部播种位的播种状态均为所述播种完成状态时,生成所述第一转移指令,以控制所述目标工作站的第一容器取放装置将所述播种墙上的各所述播种位上的已播种容器转移至所述目标载具。
14、在一些实施例中,所述方法还包括:在所述播种墙上的全部播种位的播种状态均更新为所述播种完成状态时,生成第一载具搬运指令;或者,在所述播种墙上的全部播种位的播种状态均更新为所述播种完成状态之前,生成所述第一载具搬运指令;其中,所述第一载具搬运指令用于指示搬运机器人将所述目标载具搬运至所述目标工作站的转移区,所述转移区和所述播种墙分别位于所述目标工作站的两侧,所述目标载具包括位于所述目标工作站的载具或位于载具存放区的载具。
15、在一些实施例中,所述基于所述播种位的播种状态,生成第一转移指令,包括:在所述播种墙上的任意一个播种位的播种状态为所述播种完成状态时,生成所述第一转移指令,以控制所述目标工作站的第一容器取放装置将所述任意一个播种位上的已播种容器转移至所述目标载具。
16、在一些实施例中,所述方法还包括:在所述目标载具不满足容器放置条件时,生成第二转移指令;所述第二转移指令用于指示所述第一容器取放装置将所述任意一个播种位上的已播种容器转移至所述目标工作站的第一缓存位上。
17、在一些实施例中,所述方法还包括:在所述第一容器取放装置将所述播种位上的已播种容器转移至所述目标载具或所述第一缓存位上后,控制所述第一容器取放装置将第二缓存位或可移动载具上的容器放置在所述已播种容器对应的空闲播种位上。
18、在一些实施例中,所述方法还包括:在所述第一容器取放装置将所述播种位上的已播种容器转移至所述目标载具或所述第一缓存位上的情况下,控制所述目标工作站的第二容器取放装置将第二缓存位或可移动载具上的容器放置在所述已播种容器对应的空闲播种位上;其中所述第一容器取放装置与所述第二容器取放装置不同。
19、在一些实施例中,在所述目标工作站将完成播种的已播种容器转移至所述目标载具之后,所述方法还包括:基于待处理订单和所述待播种货物,确定未播种货物的货物信息;基于所述未播种货物的货物信息,确定用于播种所述未播种货物的下一工作站;基于所述下一工作站,生成第二载具搬运指令,所述第二载具搬运指令用于指示搬运机器人将所述目标载具从所述目标工作站的转移区搬运至所述下一工作站的转移区;在所述目标载具搬运至所述下一工作站的转移区后,生成第三转移指令;所述第三转移指令用于指示所述下一工作站将所述目标载具上的目标容器转移至所述下一工作站的播种墙的空闲播种位上,以在所述下一工作站对所述未播种货物进行播种,所述目标容器为需播种所述未播种货物的容器。
20、在一些实施例中,在所述目标工作站将完成播种的已播种容器转移至所述目标载具之后,所述方法还包括:在待处理订单不存在未播种货物的情况下,生成第三载具搬运指令,所述第三载具搬运指令用于指示搬运机器人对所述目标载具上的货物进行出库处理。
21、根据本发明实施例的另一个方面,提供了一种播种系统,包括:所述目标工作站包括具有多个播种位的播种墙和第一容器取放装置,所述播种位用于放置待播种容器;可移动载具,用于放置所述待播种货物;搬运机器人,用于将放置所述待播种货物的所述可移动载具搬运至所述目标工作站的停靠区;目标载具,用于放置完成播种的已播种容器;控制装置,被配置为:响应于可移动载具到达目标工作站的停靠区,获取所述可移动载具上的待播种货物的货物信息;基于所述待播种货物的货物信息,确定所述目标工作站的所述播种墙上各所述播种位的播种信息,所述播种位的播种信息包括所述待播种货物在所述播种位上的播种数量;基于所述播种信息,生成输出指令;在播种过程中,获取所述播种墙上各所述播种位的播种状态,并基于所述播种位的播种状态,生成第一转移指令;所述目标工作站被配置为:获取所述输出指令,根据所述输出指令,输出所述待播种货物在所述各播种位上的播种数量,以使用户按照所述播种位对应的播种数量将所述待播种货物播种至所述播种位上的待播种容器;获取所述第一转移指令,并根据所述第一转移指令,将所述完成播种的已播种容器转移至所述目标载具。
22、根据本发明实施例的又一个方面,提供了一种工作站,包括:播种墙,包括多个播种位和设置于各播种位的输出装置,所述播种位用于放置待播种容器;所述输出装置被配置为:输出待播种货物在所述输出装置对应的播种位上的播种数量,以使用户按照所述播种位对应的播种数量将所述待播种货物播种至所述播种位上的待播种容器;第一容器取放装置,被配置为在播种所述待播种货物的过程中,获取第一转移指令,并基于所述第一转移指令,将所述播种位上完成播种的已播种容器转移至目标载具;其中,所述第一转移指令是根据所述播种墙上各所述播种位的播种状态生成的。
23、根据本发明实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储器,被配置为:存储一个或多个程序;其中,当所述一个或多个程序被所述一个或多个处理器执行时,所述一个或多个处理器实现根据上述任一项所述的播种控制方法。
24、根据本发明实施例的一个方面,提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被处理器执行时,实现根据上述任一项的播种控制方法。
25、综上,根据本发明实施例的播种控制方法、播种系统及工作站,可以响应于可移动载具到达目标工作站的停靠区,获取可移动载具上的待播种货物的货物信息,基于待播种货物的货物信息,确定目标工作站的播种墙上各播种位的播种信息,其中,播种位的播种信息包括待播种货物在播种位上的播种数量,基于播种信息,确定各播种位上所需待播种货物的播种数量,以按照播种位对应的播种数量将待播种货物播种至播种位上的待播种容器,在播种过程中,获取播种墙上各播种位的播种状态,并基于播种位的播种状态,生成第一转移指令,以指示目标工作站将完成播种的已播种容器转移至目标载具。
26、应用本方案,一方面,可以通过确定待播种货物在各播种位上的播种数量,为用户按照待播种货物的播种数量将待播种货物播种至播种位上的待播种容器提供便利;另一方面,可以利用目标工作站,实现播种墙上的容器的转移,不需要人工参与换箱,故可以提高货物的播种效率。
27、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!