一种集装箱吊具控制方法与流程
本发明涉及集装箱吊具,尤其涉及一种集装箱吊具控制方法。
背景技术:
1、随着港口码头的集装箱吞的吐量越来越高,对集装箱正面吊起重机的需求量也越来越大,但对于现有的正面吊起重机的吊具系统大部分都是整体进口,进口吊具整机中包括机械部分,液压部分和电气控制部分,完全依靠进口,成本昂贵。虽有有部分国产正面吊吊具是国产方案,但是使用的方案依旧是继电器串并联方案。然而,集装箱正面吊大部分都是在露天使用,且露天使用的环境很恶劣,使用场景高低温温差大,湿度盐雾高等特点,所以在这种环境下要求整体的可靠性和稳定性也高,尤其是控制方法的安全性要求更高,现有的控制方案存在一定的安全隐患,寿命和可靠性很低。
技术实现思路
1、基于此,针对现有集装箱吊具的控制方案存在一定的安全隐患,寿命和可靠性很低的技术问题,提供一种集装箱吊具控制方法。
2、本发明提供的一种集装箱吊具控制方法,包括以下步骤:
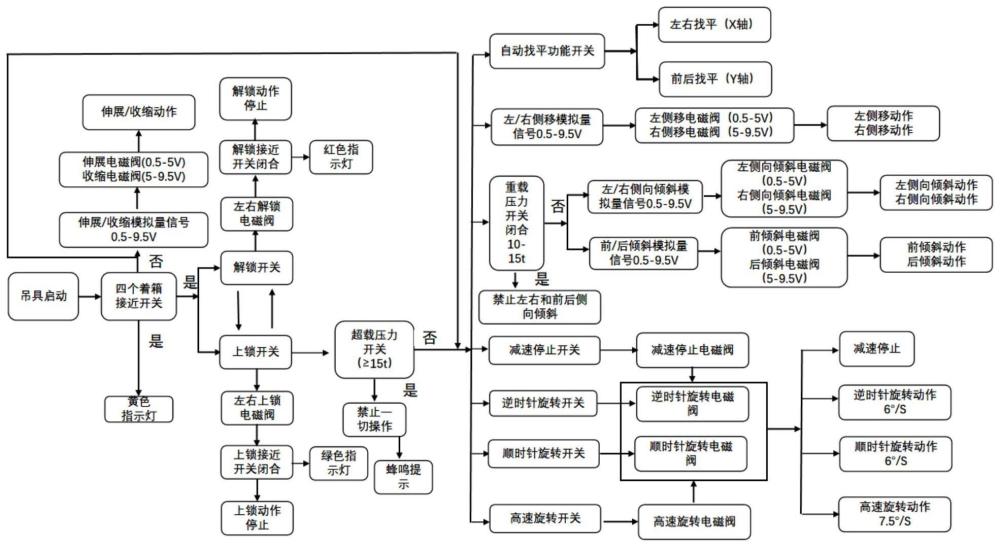
3、s1、吊具启动,将吊具四个锁头与集装箱的四个吊孔分别对插,检测吊具的四个锁头是否处于着箱状态,若是则执行s2,若否则执行s3;
4、s2、检测吊具锁头是否处于上锁状态,若是则检测吊具负载是否超过安全负载一f1,若否则执行s3,若是则发出警报;
5、s3、检测吊具的x轴角度、y轴角度是否分别等于x轴安全倾角θ1、y轴安全倾角θ2,若否则执行s4;
6、s4、若x轴角度大于/小于x轴安全倾角θ1,则驱动吊具向左/右倾斜找平直至x轴角度等于x轴安全倾角;
7、若y轴角度大于/小于y轴安全倾角θ2,则驱动吊具向前/后倾斜找平直至y轴角度等于y轴安全倾角。
8、本发明在吊具处于着箱上锁状态之后,检测吊具的负载是否安全负载一,判断吊具是否处于超载状态,若处于超载状态就禁止一切操作并报警提示工作人员,只有在未处于超载状态下才能进行正常操作,提高吊具的安全性。本发明通过判断吊具的x轴角度、y轴角度是否分别等于x轴安全倾角θ1、y轴安全倾角θ2,实现吊具的前后、左右的自动找平控制功能,使得吊具找平操作更加简单。
9、作为本发明上述方案的进一步改进,所述步骤s4还包括:
10、若x轴角度与x轴安全倾角θ1的差值为±1°时,则控制整车电机减速,直至完成找平时速度为0r;
11、若y轴角度与y轴安全倾角θ2的差值为±1°时,则控制整车电机减速,直至完成找平时速度为0r。
12、作为本发明上述方案的进一步改进,所述步骤s1中,若检测到吊具锁头未处于着箱状态,则还执行步骤s5:
13、s5、向前操作手柄使输出电压逐渐减小以驱动吊具进行伸展动作,或者向后操作手柄使输出电压逐渐增大以驱动吊具进行收缩动作。
14、作为本发明上述方案的进一步改进,所述步骤s1中若检测到吊具锁头未处于着箱状态,或者,所述步骤s2中若检测到吊具负载未超过安全负载一f1时,则还可以执行s6;
15、s6、向左操作手柄使输出电压逐渐减小以驱动吊具进行左侧移动作,或者向右操作手柄使输出电压逐渐增大以驱动吊具进行右侧移动作。
16、作为本发明上述方案的进一步改进,所述步骤s2中,若检测到吊具负载未超过安全负载一f1时,则还可以执行s7;
17、s7、检测吊具负载是否超过安全负载二f2,若否,则:
18、向左操作手柄使输出电压逐渐减小以驱动吊具进行左侧向倾斜动作;
19、或者,向右操作手柄使输出电压逐渐增大以驱动吊具进行右侧向倾斜动作;
20、或者,向前操作手柄使输出电压逐渐减小以驱动吊具进行前倾斜动作;
21、或者,向后操作手柄使输出电压逐渐增大以驱动吊具进行后倾斜动作;
22、其中,安全负载二f2为:10≤f2<15t,安全负载一f1为:f1≥15t。
23、作为本发明上述方案的进一步改进,当吊具进行左侧向倾斜动作时,若吊具的x轴角度达到左倾斜安全倾角θ3,锁定吊具并停止左倾斜动作;
24、当吊具进行右侧向倾斜动作时,若吊具的x轴角度达到右倾斜安全倾角θ4,锁定吊具并停止右倾斜动作;
25、当吊具进行前倾斜动作时,若吊具的y轴角度达到前倾斜安全倾角θ5,锁定吊具并停止前倾斜动作;
26、当吊具进行后倾斜动作时,若吊具的y轴角度达到后倾斜安全倾角θ6,锁定吊具并停止后倾斜动作;
27、其中,θ3、θ5为6°,θ4、θ6为-6°。
28、作为本发明上述方案的进一步改进,所述步骤s2中,若检测到吊具锁头未处于上锁状态,则驱动吊具锁头进行上锁动作;
29、若检测到吊具锁头处于上锁状态,则还可以驱动吊具锁头进行解锁动作。
30、作为本发明上述方案的进一步改进,所述步骤s1中,若检测到吊具锁头未处于着箱状态,则还执行步骤s8:
31、s8、向左操作手柄使输出电压逐渐减小以驱动吊具进行左侧向倾斜动作;
32、或者,向右操作手柄使输出电压逐渐增大以驱动吊具进行右侧向倾斜动作;
33、或者,向前操作手柄使输出电压逐渐减小以驱动吊具进行前倾斜动作;
34、或者,向后操作手柄使输出电压逐渐增大以驱动吊具进行后倾斜动作。
35、作为本发明上述方案的进一步改进,当吊具进行左侧向倾斜动作时,若吊具的x轴角度达到左倾斜安全倾角θ7,锁定吊具并停止左倾斜动作;
36、当吊具进行右侧向倾斜动作时,若吊具的x轴角度达到右倾斜安全倾角θ8,锁定吊具并停止右倾斜动作;
37、当吊具进行前倾斜动作时,若吊具的y轴角度达到前倾斜安全倾角θ9,锁定吊具并停止前倾斜动作;
38、当吊具进行后倾斜动作时,若吊具的y轴角度达到后倾斜安全倾角θ10,锁定吊具并停止后倾斜动作;
39、其中,θ7、θ9为10°,θ8、θ10为-10°。
40、作为本发明上述方案的进一步改进,所述步骤s1中,若检测到吊具锁头未处于着箱状态,或者,所述步骤s2中若检测到吊具负载未超过安全负载一f1时,则还可以执行s9;
41、s9.驱动吊具进行逆时针旋转、顺时针旋转、高速旋转或者减速停机。
42、与现有技术相比,本发明具有以下有益效果:
43、1、本发明在吊具处于着箱上锁状态之后,检测吊具的负载是否安全负载一,判断吊具是否处于超载状态,若处于超载状态就禁止一切操作并报警提示工作人员,只有在未处于超载状态下才能进行正常操作,提高吊具的安全性。
44、2、本发明通过判断吊具的x轴角度、y轴角度是否分别等于x轴安全倾角θ1、y轴安全倾角θ2,实现吊具的前后、左右的自动找平控制功能,使得吊具找平操作更加简单。
45、3、本发明在吊具找平控制时,设置±1°缓冲区间,提高找平控制效果,实现找平的精准控制。
46、4、本发明在吊具处于着箱上锁状态下,还检测负载是否安全负载二,判断吊具是否处于重载状态,若处于重载状态就禁止左右侧向、前后倾斜动作,只有在未处于重载状态下才能进行左右侧向、前后倾斜动作,进一步提高吊具的安全性。
47、5.本发明控制方法在吊具进行左右侧向、前后倾斜时限制吊具的倾斜角度:在吊具处于未着箱状态时,限制吊具左右侧向、前后倾斜最大角度至10°,而在吊具处于着箱上锁状态下,限制吊具左右侧向、前后倾斜最大角度至6°,能够提高吊具安全性以及使用寿命,避免长时间的大角度工况使用而导致结构部件损伤:另外在吊具处于着箱上锁状态下,限制吊具左右侧向、前后倾斜最大角度至6°,并且左右侧向倾斜和前后倾斜动作不能同时工作,目的是为了保护当吊具下方已有集装箱,集装箱里的负载不是特别重时,进行侧向倾斜和前后倾斜角度的受力保护。
- 还没有人留言评论。精彩留言会获得点赞!