一种对制冷设备的压缩机进行抽真空处理的自动化产线的制作方法
本发明涉及自动化设备领域,具体涉及一种对制冷设备的压缩机进行抽真空处理的自动化产线。
背景技术:
1、制冷设备例如酒柜在生产制造过程中,为了防止制冷运行出现冰堵,并保证压缩机运行电流的稳定、耗电的减少等,需要将冰箱压缩机内的空气进行抽真空,并且抽真空需要满足真空度;现有技术中通常采用一对一的方式进行抽真空,即一个抽真空泵对应一个制冷设备,需要工人进行搬运制冷设备,这样导致生产效率极低,费事费力。
2、为解决上述问题,现有技术中出现了采用随生产线移动的自动化输送线系统,来满足酒柜抽真空工序及整线节拍的生产需要多台抽真空泵共同工作,例如专利文献201721396952.5所公开的一种压缩机抽真空生产线的同步悬挂结构,在例如专利文献202110215545.4所公开的一种空调抽真空灌注工位的布局结构。
3、诸如上述现有技术中通过将抽真空装置设置在与制冷设备冰箱的输送线上的方式虽然可提供抽真空效率,但是随之而来的是抽真空装置与压缩机连接稳定性的问题。一般地,抽真空装置的抽真空管需要通过人工方式与压缩机的对应端口相连接,这个过程中要么停止输送带要么需要快速完成。停止输送带则会影响效果,快速完成则需要操作工人具有较高的熟练度。现有技术中在不停止输送带的情况下,不仅需要操作工人在较短的时间内进行抽真空管与压缩机的对应端口的连接,还需要开启抽真空泵,操作难度较大。因此,需要简化操作工人的操作工序。
4、另外,因人工操作难以长时间保持工作质量,因此会导致每对抽真空泵和压缩机的相对位置并不是完全相同的,这样就会导致抽真空管可能出现被拉伸的情况,例如连接操作的时间略久,再例如人力拉扯抽真空管,又例如酒柜在输送带上产生相对移动等等,进而导致连接位置漏气、连接不稳定等现象,影响抽真空效果;如果加长抽真空管,则容易出现抽真空管的卷绕现象,导致抽真空管无法正常使用;并且,即便是出现上述情况操作人员也无法发现,导致所进行抽真空的压缩机会被认为已经正常完成抽真空处理,最终导致产品的良品率降低。
技术实现思路
1、本发明的主要目的是提供一种对制冷设备的压缩机进行抽真空处理的自动化产线,具有便于操作和实用性强的优点。
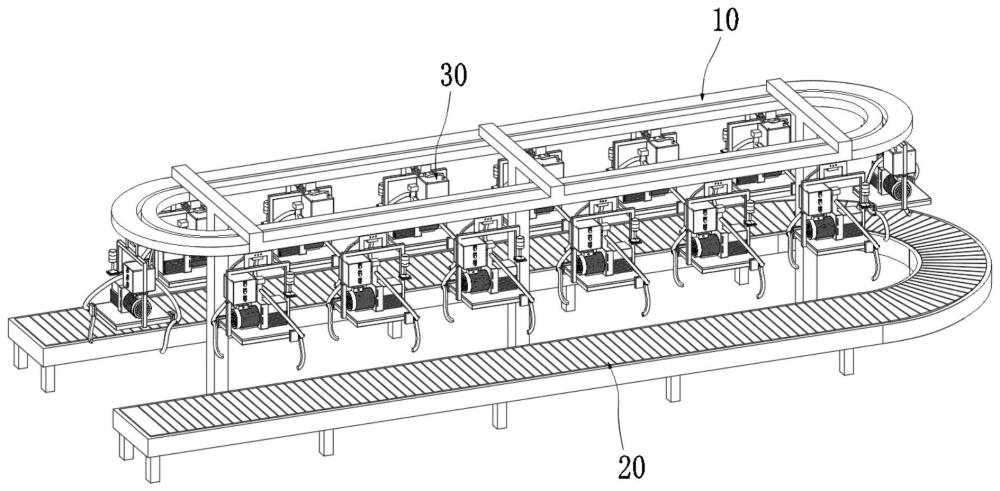
2、为了实现上述主要目的,本发明提供了一种对制冷设备的压缩机进行抽真空处理的自动化产线,自动化产线包括第一输送线、第二输送线和若干抽真空装置,若干抽真空装置间隔设置在第一输送线上;第二输送线用于输送制冷设备,以使得若干抽真空装置能够分别与制冷设备的压缩机相连接并对压缩机进行抽真空处理;
3、抽真空装置包括悬挂连接机构、支撑件、抽真空泵、控制盒以及重力传感器;支撑件通过悬挂连接机构与第一输送线相连接;抽真空泵设置在支撑件上,其通过抽真空管与压缩机相连接;
4、重力传感器设置在支撑件上,用于检测抽真空管是否处于待机位置,其中,重力传感器上设有适配于抽真空管的钩状触发部,处于待机位置的抽真空管可悬挂在钩状触发部上;
5、控制盒与重力传感器、抽真空泵均电性连接,以根据重力传感器的信号来控制抽真空泵的启停。
6、根据本发明的一种具体实施方式,悬挂连接机构包括第一连接体和第二连接体,第一连接体与第一输送线滑动连接,第二连接体在第一方向上与第一连接体转动连接;其中,第一方向与第一连接体的移动方向相同,以使得第二连接体可相对于第一连接体发生偏转。
7、根据本发明的一种具体实施方式,第一连接体包括上连接体和下连接体,上连接体和下连接体在与第一方向相垂直的第二方向上转动连接,以使得下连接体可相对于上连接体前倾或后倾;其中,上连接体与第一输送线滑动连接,下连接体与第二连接体转动连接。
8、根据本发明的一种具体实施方式,第一输送线上还设有用于限定第二连接体偏转角度范围的防过偏装置,防过偏装置包括机座和防过偏传感器,机座设置为与第一连接体相对固定,防过偏传感器设置在机座上;其中,第二连接体上设有作用部,作用部被设置为在第二连接体超出设定偏转角度时可激活防过偏传感器,以使得防过偏传感器发出过偏信号。
9、根据本发明的一种具体实施方式,第一输送线具有内外设置的第一环形轨道和第二环形轨道,第一连接体设置在第二环形轨道上,机座滑动设置在第一环形轨道上并与第一连接体同步移动。
10、根据本发明的一种具体实施方式,作用部具有固定连接端和活动连接端,固定连接端与第二连接体固定连接,活动连接端与机座活动配合连接并可相对机座产生移动,以在第二连接体超出设定偏转角度时通过活动连接端激活防过偏传感器。
11、根据本发明的一种具体实施方式,活动连接端呈u形,以能够在第一方向上对机座进行限位并驱使机座进行移动、和能够在与第一方向正交的第三方向上可相对于机座产生移动而能够在第二连接体超出设定偏转角度时激活防过偏传感器。
12、根据本发明的一种具体实施方式,活动连接端包括第一连接端和第二连接端,第一连接端和第二连接端在第一方向上位于机座的相对两侧;其中,第一连接端和第二连接端中的至少一个设有止动部,止动部可在第二连接体超出设定偏转角度时与防过偏传感器相抵以激活防过偏传感器。
13、根据本发明的一种具体实施方式,还包括输送线控制系统,输送线控制系统用于控制第一输送线和第二输送线的启停和运行速度;其中,输送线控制系统与控制盒信号连接,以根据重力传感器的信号调节第一输送线、第二输送线的运行速度。
14、根据本发明的一种具体实施方式,第一输送线呈环形,第二输送线呈u形且位于第一输送线的相对外侧;其中,抽真空装置与压缩机在第二输送线的入口处相连接以及在第二输送线的出口处分离,以在压缩机被第二输送线所输送的过程中进行预定时间范围内的抽真空处理。
15、本发明具备以下有益效果:
16、本发明通过设置对应于抽真空管的重力传感器来自动控制抽真空泵的启停,可以简化人工连接抽真空管的操作工序,进而节约操作时间,便于操作人员实现快速连接并开启抽真空操作,具有实用性强的优点。
17、另外,本发明中通过悬挂连接机构来实现抽真空泵及抽真空管相对于第一输送线的偏转,利用悬挂连接机构来实现增加抽真空管的可操作性,可有效避免抽真空管被拉伸,有利于提高连接的稳固性。
18、另外,本发明中设有防过偏装置,防过偏装置用于限定第二连接体偏转角度范围,其可以在抽真空管被拉伸而承受超过设定外力时发出提醒,并将该组连接认定为无效连接,有效避免因抽真空管被拉伸而出现的连接异常以及未完成设定要求下的抽真空处理的异常情况,提升抽真空处理的良品率。
19、为了更清楚地说明本发明的目的、技术方案和优点,下面结合附图和具体实施方式对本发明作进一步的详细说明。
技术特征:
1.一种对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于,所述自动化产线包括第一输送线、第二输送线和若干抽真空装置,若干所述抽真空装置间隔设置在所述第一输送线上;所述第二输送线用于输送制冷设备,以使得若干所述抽真空装置能够分别与制冷设备的压缩机相连接并对压缩机进行抽真空处理;
2.如权利要求1所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述悬挂连接机构包括第一连接体和第二连接体,所述第一连接体与所述第一输送线滑动连接,所述第二连接体在第一方向上与所述第一连接体转动连接;其中,第一方向与所述第一连接体的移动方向相同,以使得所述第二连接体可相对于所述第一连接体发生偏转。
3.如权利要求2所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述第一连接体包括上连接体和下连接体,所述上连接体和所述下连接体在与第一方向相垂直的第二方向上转动连接,以使得所述下连接体可相对于所述上连接体前倾或后倾;其中,所述上连接体与所述第一输送线滑动连接,所述下连接体与所述第二连接体转动连接。
4.如权利要求2所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述第一输送线上还设有用于限定所述第二连接体偏转角度范围的防过偏装置,所述防过偏装置包括机座和防过偏传感器,所述机座设置为与所述第一连接体相对固定,所述防过偏传感器设置在所述机座上;其中,所述第二连接体上设有作用部,所述作用部被设置为在所述第二连接体超出设定偏转角度时可激活所述防过偏传感器,以使得所述防过偏传感器发出过偏信号。
5.如权利要求4所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述第一输送线具有内外设置的第一环形轨道和第二环形轨道,所述第一连接体设置在所述第二环形轨道上,所述机座滑动设置在所述第一环形轨道上并与所述第一连接体同步移动。
6.如权利要求4所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述作用部具有固定连接端和活动连接端,所述固定连接端与所述第二连接体固定连接,所述活动连接端与所述机座活动配合连接并可相对所述机座产生移动,以在所述第二连接体超出设定偏转角度时通过所述活动连接端激活所述防过偏传感器。
7.如权利要求6所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述活动连接端呈u形,以能够在第一方向上对所述机座进行限位并驱使所述机座进行移动、和能够在与第一方向正交的第三方向上可相对于所述机座产生移动而能够在所述第二连接体超出设定偏转角度时激活所述防过偏传感器。
8.如权利要求7所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述活动连接端包括第一连接端和第二连接端,所述第一连接端和所述第二连接端在第一方向上位于所述机座的相对两侧;其中,所述第一连接端和所述第二连接端中的至少一个设有止动部,所述止动部可在所述第二连接体超出设定偏转角度时与所述防过偏传感器相抵以激活所述防过偏传感器。
9.如权利要求1所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:还包括输送线控制系统,所述输送线控制系统用于控制所述第一输送线和第二输送线的启停和运行速度;其中,所述输送线控制系统与所述控制盒信号连接,以根据所述重力传感器的信号调节所述第一输送线、所述第二输送线的运行速度。
10.如权利要求1所述的对制冷设备的压缩机进行抽真空处理的自动化产线,其特征在于:所述第一输送线呈环形,所述第二输送线呈u形且位于所述第一输送线的相对外侧;其中,所述抽真空装置与压缩机在所述第二输送线的入口处相连接以及在所述第二输送线的出口处分离,以在压缩机被所述第二输送线所输送的过程中进行预定时间范围内的抽真空处理。
技术总结
本发明公开了一种对制冷设备的压缩机进行抽真空处理的自动化产线,包括第一输送线、第二输送线和若干抽真空装置,若干抽真空装置间隔设置在第一输送线上;第二输送线用于输送制冷设备;抽真空装置包括悬挂连接机构、支撑件、抽真空泵、控制盒、重力传感器;支撑件通过悬挂连接机构与第一输送线相连接;抽真空泵设置在支撑件上,通过抽真空管与压缩机相连接;重力传感器设置在支撑件上,用于检测抽真空管是否处于待机位置,重力传感器上设有适配于抽真空管的钩状触发部,处于待机位置的抽真空管可悬挂在钩状触发部上;控制盒与重力传感器、抽真空泵均电性连接,以根据重力传感器的信号来控制抽真空泵的启停。本发明具有便于操作和实用性强的优点。
技术研发人员:陈高鹏,陈史凤,麦联,莫天仿,林关城,杨林林
受保护的技术使用者:广东凯得智能科技股份有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!