自动扶梯安全保护方法、装置、电子设备及存储介质与流程
本公开涉及自动控制,尤其涉及一种自动扶梯安全保护方法、装置、电子设备及存储介质。
背景技术:
1、目前自动扶梯技术可广泛应用于车站、商场、地下通道等人流集中的地方,作为一种常年运载乘客的电力驱动设备,在运行过程中会出现多种情况,例如超载、空载等,大多数自动扶梯在空载时仍在采用额定速度运行,导致能耗浪费、机械磨损等问题。在自动扶梯或自动人行道以及相关类似产品的应用过程中,当自动扶梯或自动人行道处于正常运行或停止状态时,本产品可以检测整个梯路上是否有人或者其他障碍物并反馈相关状态信号给自动扶梯或自动人行道的控制系统,作为可靠的监视和控制附加功能部件,保障自动扶梯或自动人行道在自动再启动时不对已经在梯路上的任何乘客造成伤害或惊吓。
技术实现思路
1、为克服相关技术中自动扶梯启停过程中导致的安全问题,本公开提供一种自动扶梯安全保护方法、装置、电子设备及存储介质。
2、根据本公开实施例的第一方面,提供一种自动扶梯安全保护方法,所述方法包括:
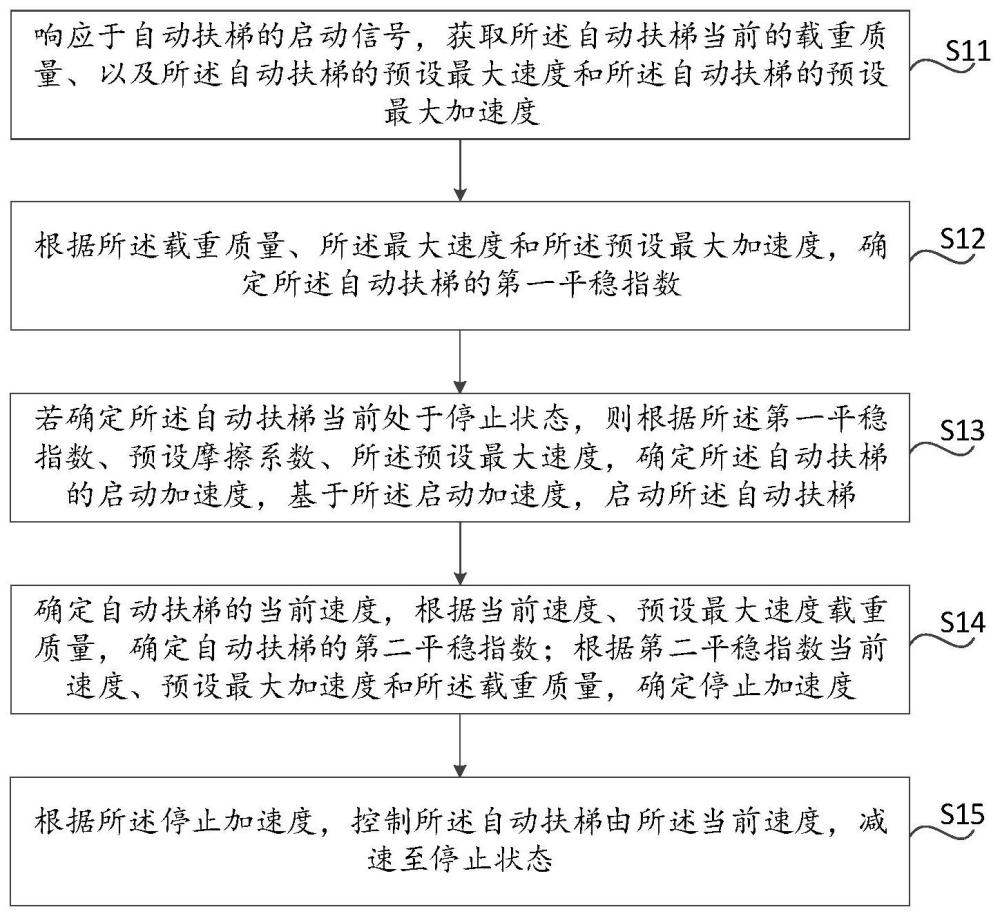
3、响应于自动扶梯的启动信号,获取所述自动扶梯当前的载重质量、以及所述自动扶梯的预设最大速度和所述自动扶梯的预设最大加速度;
4、根据所述载重质量、所述最大速度和所述预设最大加速度,确定所述自动扶梯的第一平稳指数;
5、若确定所述自动扶梯当前处于停止状态,则根据所述第一平稳指数、预设摩擦系数、所述预设最大速度,确定所述自动扶梯的启动加速度,基于所述启动加速度,启动所述自动扶梯;
6、响应于所述自动扶梯的停止信号,确定所述自动扶梯的当前速度,根据所述当前速度、所述预设最大速度、所述载重质量,确定所述自动扶梯的第二平稳指数;根据所述第二平稳指数、所述当前速度、所述预设最大加速度和所述载重质量,确定所述自动扶梯的停止加速度;
7、根据所述停止加速度,控制所述自动扶梯由所述当前速度,减速至停止状态。
8、可选地,所述根据所述载重质量、所述最大速度和所述预设最大加速度,确定所述自动扶梯的第一平稳指数,包括:
9、根据所述载重质量,确定所述自动扶梯从停止状态加速至所述预设最大速度的加速时间;
10、根据所述最大速度、所述加速时间和所述预设最大加速度,确定所述第一平稳指数。
11、可选地,所述根据所述最大速度、所述加速时间和所述预设最大加速度,确定所述第一平稳指数,包括:
12、通过以下方式确定所述第一平稳指数:
13、α=(vmax*amax)/(g*t)
14、其中,所述α为所述第一平稳指数,所述vmax为所述最大速度,所述t为所述加速时间,所述amax为所述预设最大加速度,所述g为重力加速度。
15、可选地,所述根据所述第一平稳指数、预设摩擦系数、所述预设最大速度,确定所述自动扶梯的启动加速度,包括:
16、所述启动加速度通过如下方式确定:
17、a=wα×(1+μ×w)÷(vmax2)
18、其中,所述a为所述启动加速度,所述w为所述载重质量,所述α为所述第一平稳指数,所述μ为所述预设摩擦系数,所述vmax为所述最大加速度。
19、可选地,所述根据所述当前速度、所述预设最大速度、所述载重质量,确定所述自动扶梯的第二平稳指数,包括:
20、通过以下方式确定所述第二平稳指数:
21、β=(vmax2/(2*g*w))-(vcur2/(2*g*w))
22、其中,所述β为第二平稳指数,所述vmax为所述最大速度,所述vmax为所述当前速度,所述w为所述载重质量,所述g为重力加速度。
23、可选地,所述自动扶梯上设置有对射光电传感装置,所述确定所述自动扶梯的当前速度,包括:
24、获取相邻所述对射光电传感装置之间的光电间隔时间;
25、根据预设设置距离和所述光电间隔时间,确定所述当前速度。
26、根据本公开实施例的第二方面,提供一种自动扶梯安全保护装置,所述装置包括:
27、获取模块,用于响应于自动扶梯的启动信号,获取所述自动扶梯当前的载重质量、以及所述自动扶梯的预设最大速度和所述自动扶梯的预设最大加速度;
28、第一确定模块,用于根据所述载重质量、所述最大速度和所述预设最大加速度,确定所述自动扶梯的第一平稳指数;
29、第二确定模块,用于若确定所述自动扶梯当前处于停止状态,则根据所述第一平稳指数、预设摩擦系数、所述预设最大速度,确定所述自动扶梯的启动加速度,基于所述启动加速度,启动所述自动扶梯;
30、第三确定模块,用于响应于所述自动扶梯的停止信号,确定所述自动扶梯的当前速度,根据所述当前速度、所述预设最大速度、所述载重质量,确定所述自动扶梯的第二平稳指数;根据所述第二平稳指数、所述当前速度、所述预设最大加速度和所述载重质量,确定所述自动扶梯的停止加速度;
31、执行模块,用于根据所述停止加速度,控制所述自动扶梯由所述当前速度,减速至停止状态。
32、可选地,所述第一确定模块,用于:
33、根据所述载重质量,确定所述自动扶梯从停止状态加速至所述预设最大速度的加速时间;
34、根据所述最大速度、所述加速时间和所述预设最大加速度,确定所述第一平稳指数。
35、可选地,所述根据所述最大速度、所述加速时间和所述预设最大加速度,确定所述第一平稳指数,包括:
36、通过以下方式确定所述第一平稳指数:
37、α=(vmax*amax)/(g*t)
38、其中,所述α为所述第一平稳指数,所述vmax为所述最大速度,所述t为所述加速时间,所述amax为所述预设最大加速度,所述g为重力加速度。
39、可选地,所述第二确定模块,用于:
40、所述启动加速度通过如下方式确定:
41、a=wα×(1+μ×w)÷(vmax2)
42、其中,所述a为所述启动加速度,所述w为所述载重质量,所述α为所述第一平稳指数,所述μ为所述预设摩擦系数,所述vmax为所述最大加速度。
43、可选地,所述第三确定模块,用于:
44、通过以下方式确定所述第二平稳指数:
45、β=(vmax2/(2*g*w))-(vcur2/(2*g*w))
46、其中,所述β为第二平稳指数,所述vmax为所述最大速度,所述vmax为所述当前速度,所述w为所述载重质量,所述g为重力加速度。
47、可选地,所述获取模块,用于:
48、获取相邻所述对射光电传感装置之间的光电间隔时间;
49、根据预设设置距离和所述光电间隔时间,确定所述当前速度。
50、根据本公开实施例的第三方面,提供一种电子设备,包括:
51、存储器,其上存储有计算机程序;
52、处理器,用于执行所述存储器中的所述计算机程序,以实现本公开第一方面中任一项所述自动扶梯安全保护方法的步骤。
53、根据本公开实施例的第四方面,提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本公开第一方面中任一项所述自动扶梯安全保护方法的步骤。
54、本公开的实施例提供的技术方案可以包括以下有益效果:
55、通过上述方式,响应于自动扶梯的启动信号,获取所述自动扶梯当前的载重质量、以及所述自动扶梯的预设最大速度和所述自动扶梯的预设最大加速度,根据所述载重质量、所述最大速度和所述预设最大加速度,确定所述自动扶梯的第一平稳指数,若确定所述自动扶梯当前处于停止状态,则根据所述第一平稳指数、预设摩擦系数、所述预设最大速度,确定所述自动扶梯的启动加速度,基于所述启动加速度,启动所述自动扶梯,响应于所述自动扶梯的停止信号,确定所述自动扶梯的当前速度,根据所述当前速度、所述预设最大速度、所述载重质量,确定所述自动扶梯的第二平稳指数;根据所述第二平稳指数、所述当前速度、所述预设最大加速度和所述载重质量,确定所述自动扶梯的停止加速度,根据所述停止加速度,控制所述自动扶梯由所述当前速度,减速至停止状态。从而在自动扶梯的启停过程中实现慢启动和慢停止的方式,使自动扶梯在启停过程中不会对扶梯上的用户造成伤害和惊吓,提高了自动扶梯的安全性。
- 还没有人留言评论。精彩留言会获得点赞!