一种双缸绳排起重机用的单测长任意伸缩控制方法及系统与流程
本发明涉及一种双缸绳排起重机用的单测长任意伸缩控制方法及系统,属于工程机械领域。
背景技术:
1、目前市场大多数起重机考虑整机成本,只配置长度角度传感器检测总臂长、不配置二节臂长度传感器检测二节臂伸缩长度,起重机的二节起重臂上会标记二节起重臂0%、50%、100%位置,,操作人员只能先将二节起重臂伸至0%、50%、100%起重一个位置,再伸缩三四五节臂伸至行程内的任意位置,此时额定吊载重量受到二节起重臂0%、50%、100%位置限制,可选z值数量不多,即能进行的吊载工况不多。
2、对于只配置长度角度传感器的起重机,其二节臂的可伸缩位置决定了起重机的可吊载工况数量,要想实现起重机在主臂行程内任意位置具备吊载性能,必须检测或者计算到二节臂的伸缩长度。
3、采用二节臂小测长检测二节臂伸缩长度、采用长度角度传感器检测整个主臂伸缩长度,利用二级缸切换翘板开关控制二级缸切换阀通断,二级缸切换翘板开关控制二级缸切换阀断电阻断时,三四五节臂可同时同步伸缩,二级缸切换翘板开关控制二级缸切换阀得电连通时,二节臂可伸缩;此控制系统硬件多,成本昂贵,二节臂小测长长度标零需要开盖操作,存在进水隐患。
技术实现思路
1、本发明提供了一种双缸绳排起重机用的单测长任意伸缩控制方法及系统,解决了背景技术中披露的问题。
2、为了解决上述技术问题,本发明所采用的技术方案是:
3、一种双缸绳排起重机用的单测长任意伸缩控制方法:
4、利用长度角度传感器测量伸缩总臂长;
5、二级缸切换开关控制一级/二级缸伸缩切换阀并将切换信号传递力限器识别;
6、力限器采用单测长双缸行程迭代流程计算三四五节臂长度或二节臂长度;
7、根据性能表插值计算当前三四五节臂长度或二节臂长度对应的吊载性能,力限器允许起重机在该性能条件下进行吊载作业。
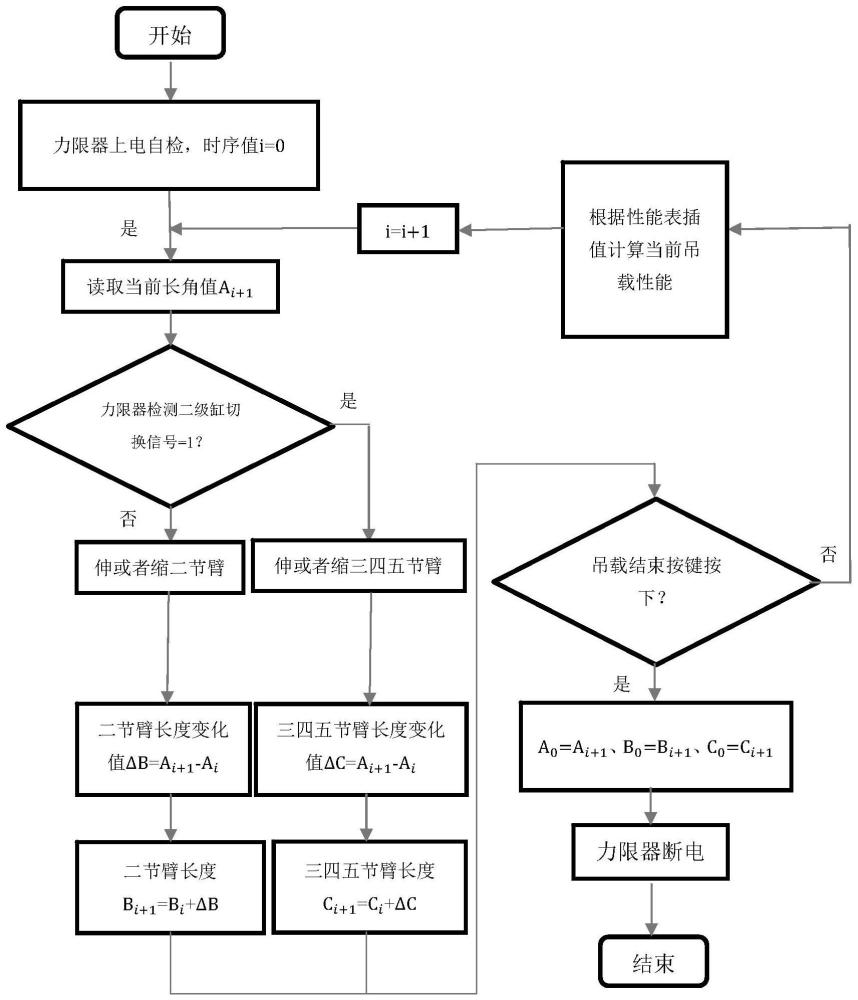
8、进一步地,所述单测长双缸行程迭代流程为:
9、步骤1、力限器上电自检,时序值i=0;
10、步骤2、若力限器得电,读取当前伸缩总臂长度ai+1;
11、步骤3、力限器检测二级缸切换信号是否=1;
12、步骤4、若是则判定为伸缩三四五节臂,计算三四五节臂长度变化值,根据三四五节臂长度变化值计算当前三四五节臂长度;
13、否则判定为伸缩二节臂,计算二节臂长度变化值,根据二节臂长度变化值计算当前二节臂长度;
14、步骤5、判断吊载结束按键是否按下;
15、步骤6、若吊载结束按键按下,总臂长度、二节臂长度和三四五节臂长度停留在当前时刻,力限器断电;
16、步骤7、若吊载结束按键未按下,根据性能表插值计算当前三四五节臂长度或二节臂长度对应的吊载性能;
17、步骤8、时序值i=i+1,返回步骤2。
18、进一步地,三四五节臂长度变化值δc=ai+1-ai;当前三四五节臂长度ci+1=ci+δc;ai为总臂初始长度,ci为三四五节臂初始长度。
19、进一步地,二节臂长度变化值δb=ai+1-ai;当前二节臂长度bi+1=bi+δb;ai为总臂初始长度,bi为二节臂初始长度。
20、相应地,一种双缸绳排起重机用的单测长任意伸缩控制系统,包括:
21、长度角度传感器、二级缸切换阀、二级缸切换翘板开关和力限器;
22、长度角度传感器用于检测总臂伸缩长度,二级缸切换翘板开关触发信号控制二级缸切换阀,力限器根据总臂伸缩长度及二级缸切换翘板开关触发信号计算任意位置的二节臂伸缩长度或三四五节臂伸缩长度,进而计算任意伸缩位置的臂长组合,进而再根据性能表匹配出任意伸缩臂长组合下的吊载性能。
23、进一步地,所述长度角度传感器外置于总臂。
24、进一步地,所述二级缸切换翘板开关内置于操纵室。
25、进一步地,所述二级缸切换翘板开关为显示器上配置虚拟的二级缸切换开关。
26、本发明所达到的有益效果:
27、1、单测长双缸绳排起重机配置任意伸缩功能;使双缸绳排起重机在主臂只配置一个长度传感器的情况下,可以识别出整个主臂的伸缩长度、二节臂伸缩长度、二级缸切换状态,进而力限器根据识别的参数、结合性能表、任意伸缩组合匹配出吊载性能。节约硬件成本。
28、2、单测长双缸绳排起重机可进行任意伸缩吊载作业,无需单测长双缸绳排起重机常用的顺序伸缩(伸臂先伸二节臂再伸三四五节臂,缩臂先缩三四五节臂再缩二节臂)方法,因为本控制系统可以计算出任意伸缩工况的伸缩组合,进而匹配出任意伸缩组合下的吊载性能。力限器控制当前吊载不超过额定值,司机仅允许在对应吊载性能下施工作业,避免超载引发安全事故。
技术特征:
1.一种双缸绳排起重机用的单测长任意伸缩控制方法,其特征在于:
2.根据权利要求1所述的双缸绳排起重机用的单测长任意伸缩控制方法,其特征在于,所述单测长双缸行程迭代流程为:
3.根据权利要求2所述的双缸绳排起重机用的单测长任意伸缩控制方法,其特征在于,三四五节臂长度变化值δc=ai+1-ai;当前三四五节臂长度ci+1=ci+δc;ai为总臂初始长度,ci为三四五节臂初始长度。
4.根据权利要求2所述的双缸绳排起重机用的单测长任意伸缩控制方法,其特征在于,二节臂长度变化值δb=ai+1-ai;当前二节臂长度bi+1=bi+δb;ai为总臂初始长度,bi为二节臂初始长度。
5.一种双缸绳排起重机用的单测长任意伸缩控制系统,其特征在于,包括:长度角度传感器、二级缸切换阀、二级缸切换翘板开关和力限器;
6.根据权利要求5所述的双缸绳排起重机用的单测长任意伸缩控制系统,其特征在于,所述长度角度传感器外置于总臂。
7.根据权利要求5所述的双缸绳排起重机用的单测长任意伸缩控制系统,其特征在于,所述二级缸切换翘板开关内置于操纵室。
8.根据权利要求5所述的双缸绳排起重机用的单测长任意伸缩控制系统,其特征在于,所述二级缸切换翘板开关为显示器上配置虚拟的二级缸切换开关。
技术总结
本发明公开了一种双缸绳排起重机用的单测长任意伸缩控制方法及系统,力限器识别二级缸切换信号、主臂伸缩测长,结合单测长双缸行程迭代算法计算出二节臂伸臂长度、三四五节臂伸臂长度、伸臂长度,再结合现有的性能表、匹配出任意伸缩组合的额定吊载性能,力限器控制当前吊载不超过额定值。力限器记录总臂长、二节臂臂长、三四五节臂臂长初始值,利用二级缸切换信号识别后续伸缩组合,再根据变化的伸缩组合时序对总臂长的变化量进行迭代计算,进而计算出二节臂或三四五节臂迭代变量值,结合二节臂臂长、三四五节臂臂长初始值计算出二节臂或三四五节臂实时长度,进而得到二节臂与三四五节臂的伸臂长度组合。节约硬件成本,避免超载保障吊载安全。
技术研发人员:张庆孟,曹广志,杨文龙,陈曦,吴为为
受保护的技术使用者:徐州重型机械有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!