一种基于无绳电梯的大型建筑群网格化立体输送系统
本发明涉及一种大型建筑群网格化立体输送系统,具体涉及一种基于无绳电梯的大型建筑群网格化立体输送系统。
背景技术:
1、随着城市现代化进程的不断加快,超高层大型建筑群(如超高层写字楼与超高层医院病房等)也越来越多,而电梯作为服务于到达建筑物内若干特定楼层的设备,其运输人员和物资的效率显得尤为重要。
2、传统的曳引驱动电梯是采用曳引机、曳引钢丝绳,导向轮,反绳轮组,轿厢等组成,通过曳引机带动钢丝绳进行提升轿厢。然而曳引驱动电梯受其结构的限制,在一个电梯立井内仅能布置一台轿厢,存在效率低的现象。当面对超高层建筑时,只能通过增加立井的方式运行多部轿厢,然而在早午晚电梯上下行高峰时,仍然存在人员等候电梯的现象。此外,如写字楼和医院病房楼往往是多个楼组成的建筑集群,初次前往某公司或某病房时容易走错楼房,严重影响人员出行效率。因此,为解决上述问题,亟需一种适用于多建筑物之间的网格化立体输送的电梯系统。
3、而无绳电梯摆脱了钢丝绳的束缚,可以在一个井道内布置多台轿厢的,从而提高电梯的运输效率。当人员走错楼时,也可通过楼与楼之间的横向移动电梯迅速到达正确的建筑物,提高人员出行的容错率。
4、专利文件cn202110954425.6公开了一种“无绳电梯运载工具工作站”,该专利通过转移托架将装有轿厢的电梯轿厢容纳槽进行移动,从而实现轿厢在多个电梯井之间的转移,然而因为用来承载电梯轿厢容纳槽的水平横梁需要横跨电梯井,导致轿厢不能继续向上移动,因此该运载工作站必须布置在楼层顶部,该专利不能实现每一层之间的水平移动;此外,该专利只能实现单个建筑内单一水平方向上的移动,不能实现轿厢的转向功能。
5、专利文件cn202110812641.7公开了“无绳电梯建筑物到建筑物移动系统”,该技术方案在楼底采用定制化工具或者其他交通工具运载电梯轿厢,以此实现轿厢从一个建筑物到另一个建筑物的移动,然而该运输方式与人乘车移动到另一个建筑物无甚区别。
6、专利文件cn202180015833.3公开了“电梯系统”,该专利在轿厢的侧面设置可旋转的电梯支架,以此实现竖直和水平方向上的移动,然而该轿厢的受力点全在轿厢侧面,因受力不均容易损坏支撑轴承,从而导致轿厢从电梯井内脱落或倾斜;此外,该专利虽然能够不同建筑物之间的移动,但也仅限于两个建筑物之间,因为其线性的滑架结构和侧面设置的电梯支架结构,不能实现轿厢在建筑物内直角转向的功能。
7、专利文件cn201922136583.1与专利文件cn201810586658.3都提出了直线电机的无绳电梯,然而两个专利的技术方案都是采用直线电机一种动力源进行驱动,所承受的负载较小,每次仅能承载少数人,效率较低;此外,因无法在直线电机自身机械结构上布置制动器,当突然断电时,电梯存在坠落风险,安全性和可靠性有待提高。专利文件cn201721625185.0公开了“回形井道电磁无绳电梯”,该专利是通过电磁铁吸住轿厢,经步进电机和丝杠传动实现水平移动的,与cn202110954425.6存在相同的问题,只能布置在电梯井顶部,在此不再赘述。
技术实现思路
1、针对上述现有技术存在的问题,本发明提供一种基于无绳电梯的大型建筑群网格化立体输送系统,电梯可以在建筑物内纵向移动,同时还可以在不同建筑物之间横向移动。
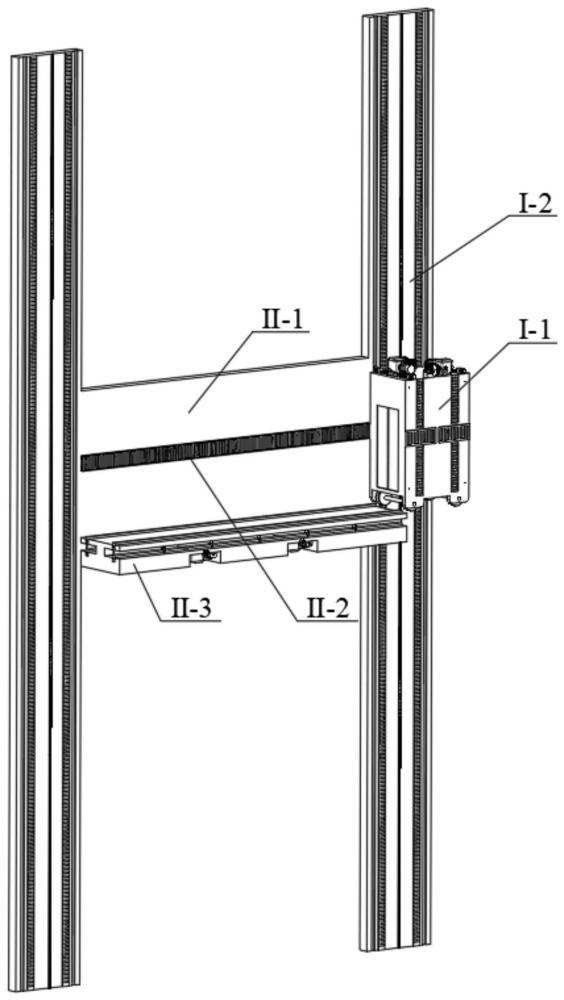
2、为实现上述目的,本发明提供如下技术方案:一种基于无绳电梯的大型建筑群网格化立体输送系统,包括纵向运输子系统和横向运输子系统,纵向运输子系统设置在单栋建筑内,横向运输子系统设置在两栋建筑之间且把两栋建筑内部的纵向运输子系统连通;其特征在于:
3、纵向运输子系统包括轿厢和立井井道;
4、立井井道的左右两侧井壁纵向的中间位置均设有齿条,齿条的两侧分别设有纵向直线电机次级和导向槽;
5、轿厢包括轿厢主体、两组驱动机构、四组导向机构和变向机构;两组驱动机构分别设置在轿厢主体顶面的左右两侧中间位置,四组导向机构分别设置在轿厢主体顶面的四个边角处,变向机构设置在轿厢主体的底面;
6、轿厢主体的前后侧面分别开设轿厢前门、轿厢后门,轿厢主体的左右两个侧面纵向方向各分别设置两列纵向直线电机初级,轿厢主体的左右两个侧面横向方向分别设置横向直线电机初级;驱动机构包括电机、减速器、小齿轮和大齿轮,电机与减速器连接,减速器与小齿轮连接,小齿轮与大齿轮啮合,左、右两侧驱动机构的大齿轮设置位置分别与左、右两个井壁上的齿条位置对应并与所对应的齿条啮合;
7、导向机构包括步进电机、丝杠、滑块和导向轮,丝杠的一端与步进电机连接,丝杠上螺纹连接有滑块,滑块上连接有导向轮,四组导向机构中的导向轮设置位置分别与左、右两个井壁上的导向槽位置对应;
8、变向机构包括轮轴、轨轮、驱动电机和驱动减速器,轿厢主体底部前后两端分别设有轮轴,前后两个轮轴的两端分别设有轨轮,驱动电机通过驱动减速器与其中一个轮轴连接;
9、横向运输子系统包括横向连廊、横向直线电机次级和连廊底座,横向直线电机次级设置在横向连廊的左右两个侧壁上,连廊底座设置在横向连廊的底部;连廊底座内部左右两侧各开设一条钢轨槽,钢轨槽中设置移动钢轨,移动钢轨的底面设置有钢轨齿条,连廊底座底面开设驱动系统槽,驱动系统槽中设有移动钢轨驱动机构,移动钢轨驱动机构包括钢轨电机、钢轨减速器、钢轨齿轮和齿轮轴,齿轮轴通过轴承设置在驱动系统槽中,钢轨电机通过与钢轨减速器与齿轮轴的中部连接,齿轮轴两端设有钢轨齿轮,两端的钢轨齿轮分别与一条移动钢轨底面的钢轨齿条啮合。
10、进一步的,所述轿厢主体顶面开设滑块槽,滑块槽位置与滑块位置对应,滑块底部嵌入在滑块槽中。
11、进一步的,沿所述钢轨槽开设方向,左右对称间隔设置钢轨导向轮,钢轨导向轮与移动钢轨底部滚动连接。
12、进一步的,所述连廊底座底面设置两个驱动系统槽,每个驱动系统槽中均设有移动钢轨驱动机构。
13、进一步的,所述单栋建筑所连接的横向运输子系统为两个且排列不是“一”字型时,横向运输子系统向建筑内部延伸,最终所有横向运输子系统在建筑内的交汇处设有转向盘,转向盘上设有旋转钢轨。
14、进一步的,所述旋转钢轨的长度大于轿厢主体的长度。
15、进一步的,还包括电磁制动机构,电磁制动机构设置在轿厢主体的顶面且位于小齿轮的外侧面一侧。
16、与现有技术相比,本发明采用直线电机和齿轮齿条传动的驱动方式,取消了传统电梯的曳引钢丝绳,避免了使用钢丝绳带来的磨损扰动问题,使得一个电梯立井内可运行多部电梯轿厢,大大缓解人流高峰期电梯运输的压力。此外,直线电机初级、次级和齿轮、齿条都能实现分离和配合,在电梯轿厢纵向移动的基础功能上再实现电梯轿厢的横向移动,并且在纵横向移动的节点位置,采用可移动式的钢轨实现电梯纵横向移动的过渡,为电梯由纵向转为横向提供了保障,大大提高了人员出行走错楼的容错率。
技术特征:
1.一种基于无绳电梯的大型建筑群网格化立体输送系统,包括纵向运输子系统(ⅰ)和横向运输子系统(ⅱ),纵向运输子系统(ⅰ)设置在单栋建筑内,横向运输子系统(ⅱ)设置在两栋建筑之间且把两栋建筑内部的纵向运输子系统(ⅰ)连通;其特征在于:
2.根据权利要求1所述的一种基于无绳电梯的大型建筑群网格化立体输送系统,其特征在于:所述轿厢主体(ⅰ-108)顶面开设滑块槽(ⅰ-113),滑块槽(ⅰ-113)位置与滑块(ⅰ-111)位置对应,滑块(ⅰ-111)底部嵌入在滑块槽(ⅰ-113)中。
3.根据权利要求1所述的一种基于无绳电梯的大型建筑群网格化立体输送系统,其特征在于:沿所述钢轨槽(ⅱ-301)开设方向,左右对称间隔设置钢轨导向轮(ⅱ-303),钢轨导向轮(ⅱ-303)与移动钢轨(ⅱ-302)底部滚动连接。
4.根据权利要求1所述的一种基于无绳电梯的大型建筑群网格化立体输送系统,其特征在于:所述连廊底座(ⅱ-3)底面设置两个驱动系统槽(ⅱ-310),每个驱动系统槽(ⅱ-310)中均设有移动钢轨驱动机构。
5.根据权利要求1所述的一种基于无绳电梯的大型建筑群网格化立体输送系统,其特征在于:所述单栋建筑所连接的横向运输子系统(ⅱ)为两个且排列不是“一”字型时,横向运输子系统(ⅱ)向建筑内部延伸,最终所有横向运输子系统(ⅱ)在建筑内的交汇处设有转向盘(ⅱ-402),转向盘(ⅱ-402)上设有旋转钢轨(ⅱ-403)。
6.根据权利要求5所述的一种基于无绳电梯的大型建筑群网格化立体输送系统,其特征在于:所述旋转钢轨(ⅱ-403)的长度大于轿厢主体(ⅰ-108)的长度。
7.根据权利要求1所述的一种基于无绳电梯的大型建筑群网格化立体输送系统,其特征在于:还包括电磁制动机构(ⅰ-119),电磁制动机构(ⅰ-119)设置在轿厢主体(ⅰ-108)的顶面且位于小齿轮(ⅰ-103)的外侧面一侧。
技术总结
本发明公开了一种基于无绳电梯的大型建筑群网格化立体输送系统,包括纵向运输子系统和横向运输子系统,纵向运输子系统设置在单栋建筑内,横向运输子系统设置在两栋建筑之间且把两栋建筑内部的纵向运输子系统连通;本发明采用直线电机和齿轮齿条传动的驱动方式,取消了传统电梯的曳引钢丝绳,使得一个电梯立井内可运行多部电梯轿厢,大大缓解人流高峰期电梯运输的压力。此外,直线电机初级、次级和齿轮、齿条都能实现分离和配合,在电梯轿厢纵向移动的基础功能上再实现电梯轿厢的横向移动,并且在纵横向移动的节点位置,采用可移动式的钢轨实现电梯纵横向移动的过渡,为电梯由纵向转为横向提供了保障,大大提高了人员出行走错建筑物的容错率。
技术研发人员:阴妍,李玥锋,鲍久圣,颉浩浩,潘国宇
受保护的技术使用者:中国矿业大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!