缆索起重机自动检测浇筑坝段的方法、缆索起重机与流程
本发明涉及缆索起重机,尤其涉及一种缆索起重机自动检测浇筑坝段的方法、缆索起重机。
背景技术:
1、水电站大坝浇筑主要的施工设备为缆索起重机、门机、塔机等。在这些设备中,缆索起重机的覆盖范围大,浇筑效率高,在中大型水电站大坝物料输送领域的应用十分广泛。
2、大坝浇筑过程建模及大坝当前浇筑工作安排,需要获取当前大坝各坝段浇筑情况。水电站施工都是24小时轮流工作,指挥人员和操作人员工作强度大,很容易因疲劳而出现统计失误,存在很多人为不可控因素。由于大坝为不规则形状及无法直接定位大坝坐标,导致根据预设数据并不能实现准确的定位。
技术实现思路
1、本发明针对现有技术中的缺点,提供了一种依靠缆机相关位置进行标记的方法以精准定位当前浇筑大坝的位置。
2、一种缆索起重机自动检测浇筑坝段的方法,包括以下步骤:
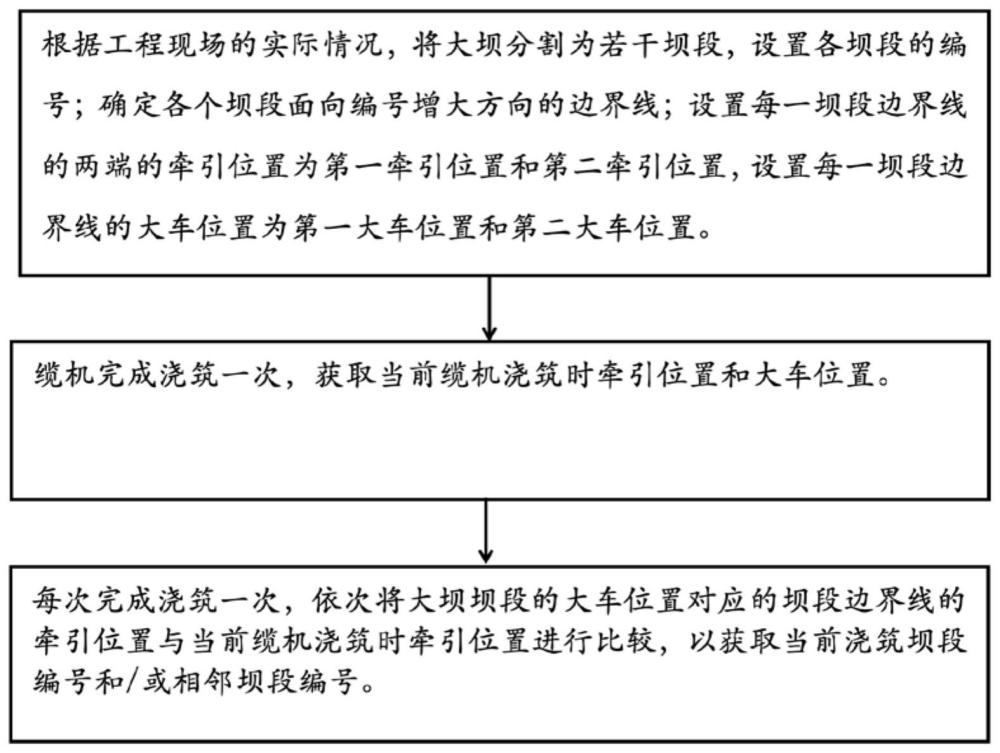
3、根据工程现场的实际情况,将大坝分割为若干坝段,设置各坝段的编号;确定各个坝段面向编号增大方向的边界线;设置每一坝段边界线的两端的牵引位置为第一牵引位置x1和第二牵引位置x2,设置每一坝段边界线的大车位置为第一大车位置y1和第二大车位置y2;
4、缆机完成浇筑一次,获取当前缆机浇筑时牵引位置x0和大车位置y0;每次完成浇筑一次,依次将大坝坝段的大车位置对应的坝段边界线的牵引位置xa与当前缆机浇筑时牵引位置x0进行比较,以获取当前浇筑坝段编号和/或相邻坝段编号;
5、其中,大坝坝段的大车位置对应的坝段边界线的牵引位置xa通过第一牵引位置x1、第二牵引位置x2、大车位置y0、第一大车位置y1和第二大车位置y2进行计算。
6、优选的,所述大坝坝段的大车位置对应的坝段边界线的牵引位置的计算方法为:
7、xa=b[i].x1+(b[i].x2-b[i].x1)*(y0-b[i].y1)/(b[i].y2-b[i].y1),
8、其中,b[i].id,第i坝段编号;b[i].x1,第i坝段边界线的第一牵引位置;b[i].x2,第i坝段边界线的第二牵引位置;b[i].y1,第i坝段边界线的第一大车位置;b[i].y2,第i坝段边界线的第二大车位置坐标。
9、优选的,还包括步骤:设置坝段边界值xb,以所述坝段边界值作为修正数据,依次将大坝坝段的大车位置对应的坝段边界线的牵引位置与当前缆机浇筑时牵引位置进行比较,以获取当前浇筑坝段ba和/或相邻坝段bb。
10、优选的,判断当前浇筑的是否是最后一个坝段号,如果是最后一个坝段号,则判断xa<=x0,如果是则ba=b[i].id,bb=-1,如果不是ba=-1,bb=-1,结束循环,返回结果;
11、如果不是最后一个坝段,判断x0<(b[i+1].x1-xb)且x0<(b[i+1].x2-xb),如果是则结束当前循环,进入下一个循环。
12、如果不是最后一个坝段,且不满足x0<(b[i+1].x1-xb)且x0<(b[i+1].x2-xb),则计算xa,并执行以下判断:,
13、如果xa>x0且xa<=(x0+xb),则ba=b[i+1].id,bb=b[i].id,结束计算,返回计算结果;
14、如果xa+xb<x0,则ba=b[i].id,bb=-1,结束计算,返回计算结果;
15、如果xa<=x0且(xa+xb)>=x0,则ba=b[i].id,bb=b[i+1].id,结束计算,返回计算结果;
16、如果上述三个条件都不满足,则i+1,继续进入下一个循环。
17、优选的,判断是否是已经完成浇筑一次的方法包括:采集缆机吊装物重量的开始变化至吊装物料重量不再变化,将吊装物料重量不再变化判定为浇筑完成。
18、还提出一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被调用实现缆索起重机自动检测浇筑坝段的方法。
19、还提出一种缆索起重机,其特征在于,包括计算机可读存储介质,存储有计算机程序;
20、处理器,调用计算机可读存储介质中存储的计算机指令,执行其中一个或者多个程序,以实现存储有与缆索起重机自动检测浇筑坝段的方法。
21、还包括大车机构和牵引机构。
22、本发明的有益效果:提供了一种依靠缆机相关位置进行标记的方法以精准定位当前浇筑大坝的位置。又由于缆机坐标和大坝的位置不能完全匹配,设计一种以缆机坐标以及大坝的结构特性为基础的缆机浇筑自动计算所属坝段的方法,能够在缆索起重机使用过程中自动识别当前浇筑的坝段,计算出的数据准确性高,减少人为统计的工作量,同时为实现智慧大坝提供可靠的数据,为智慧大坝后期数据建模提供可靠的数据基础。
技术特征:
1.一种缆索起重机自动检测浇筑坝段的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,还包括步骤:设置坝段边界值xb,以所述坝段边界值作为修正数据,依次将大坝坝段的大车位置对应的坝段边界线的牵引位置与当前缆机浇筑时牵引位置进行比较,以获取当前浇筑坝段ba和/或相邻坝段bb。
3.根据权利要求1所述的方法,其特征在于,所述大坝坝段的大车位置对应的坝段边界线的牵引位置的计算方法为:
4.根据权利要求2所述的方法,其特征在于,判断当前浇筑的是否是最后一个坝段号,如果是最后一个坝段号,则判断xa<=x0,如果是则ba=b[i].id,bb=-1,如果不是ba=-1,bb=-1,结束循环,返回结果;
5.根据权利要求4所述的方法,其特征在于,如果不是最后一个坝段,且不满足x0<(b[i+1].x1-xb)且x0<(b[i+1].x2-xb),则计算xa,并执行以下判断:,
6.根据权利要求1所述的方法,其特征在于,判断是否是已经完成浇筑一次的方法包括:采集缆机吊装物重量的开始变化至吊装物料重量不再变化,将吊装物料重量不再变化判定为浇筑完成。
7.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序被调用实现权利要求1-6任一所述的缆索起重机自动检测浇筑坝段的方法。
8.一种缆索起重机,其特征在于,包括计算机可读存储介质,存储有计算机程序;
9.根据权利要求8所述的缆索起重机,其特征在于,还包括大车机构和牵引机构。
技术总结
本发明公开一种缆索起重机自动检测浇筑坝段的方法、缆索起重机,涉及缆索起重机技术领域,方法包括根据工程现场的实际情况,将大坝分割为若干坝段,设置各坝段的编号;确定各个坝段面向编号增大方向的边界线;设置每一坝段边界线的两端的牵引位置为第一牵引位置和第二牵引位置,每一坝段边界线的大车位置为第一大车位置和第二大车位置;缆机完成浇筑一次,获取当前缆机浇筑时牵引位置和大车位置;依次将大坝坝段的大车位置对应的坝段边界线的牵引位置与当前缆机浇筑时牵引位置进行比较,以获取当前浇筑坝段编号和/或相邻坝段编号。本发明能够在缆索起重机使用过程中自动识别当前浇筑的坝段,计算出来的数据准确性高,减少人为统计的工作量。
技术研发人员:侯孙海,殷晓峰,冯嘉伟
受保护的技术使用者:杭州国电大力机电工程有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!