基于具有超限保护功能的叉车式AGV的货物运输系统的制作方法
本申请涉及物流仓储领域,尤其是一种基于具有超限保护功能的叉车式agv的货物运输系统。
背景技术:
1、在物流仓储领域,常常需要使用叉车式agv(automated guided vehicle)来叉取运输货物,一个物流仓储场景下一般会有多台不同负载规格的叉车式agv可供选择,从而适应不同货物叉取运输需求。目前的做法一般先利用称重平台称取货物的重量,然后按照经验选择与货物的重量相匹配的叉车式agv来叉取运输该货物,但是这种做法需要配备额外的称重平台,较为繁琐,而且叉车式agv实际受到的载荷也并不仅仅与货物的重量相关,因此现有的这种方法也容易出现叉车式agv超载荷的情况,影响货物运输安全也影响叉车式agv本身的运行安全。
技术实现思路
1、本申请针对上述问题及技术需求,提出了一种基于具有超限保护功能的叉车式agv的货物运输系统,本申请的技术方案如下:
2、一种基于具有超限保护功能的叉车式agv的货物运输系统,该货物运输系统包括总控制器以及若干台叉车式agv,每台叉车式agv的连通起升油缸的液压管路上安装压力传感器,存在至少两台叉车式agv的最大载荷不同;货物运输系统实现的调度方法包括:
3、总控制器向初始叉车式agv下发货物运输任务,货物运输任务指示待运输货物以及待放置位置,初始叉车式agv是货物运输系统的其中一台叉车式agv;
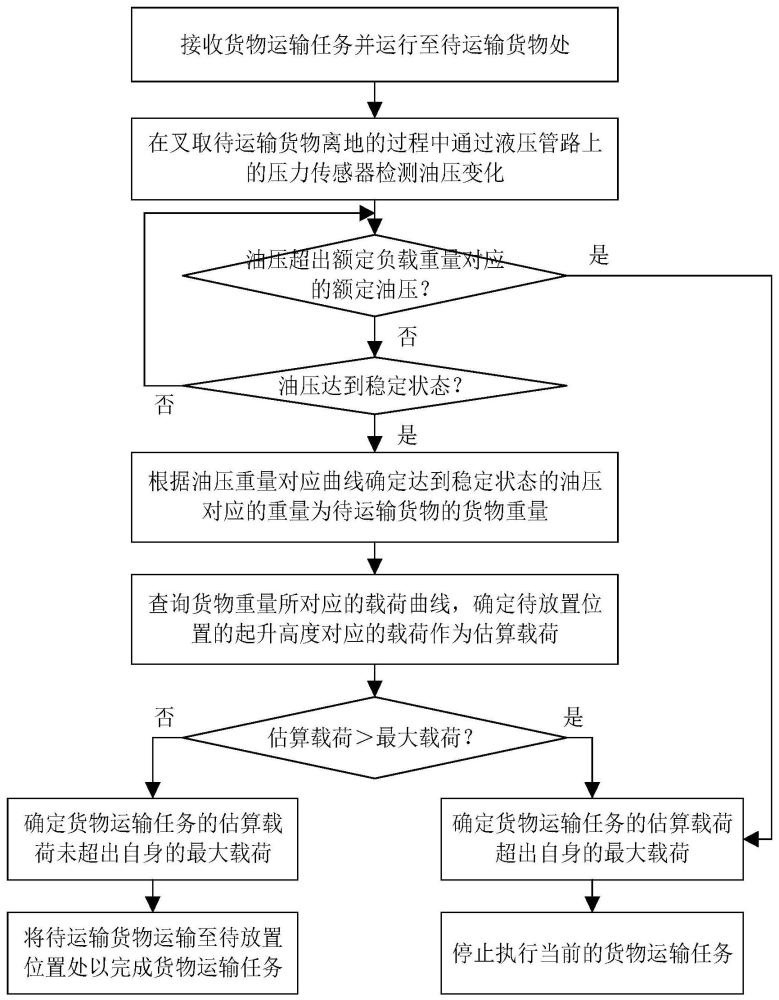
4、初始叉车式agv接收货物运输任务并运行至待运输货物处,初始叉车式agv在叉取待运输货物离地的过程中通过液压管路上的压力传感器检测油压变化,并根据油压变化和待放置位置检测货物运输任务的估算载荷是否超出自身的最大载荷;
5、初始叉车式agv在确定货物运输任务的估算载荷未超出自身的最大载荷时,将待运输货物运输至待放置位置处以完成货物运输任务;
6、初始叉车式agv在确定货物运输任务的估算载荷超出自身的最大载荷时,停止执行货物运输任务。
7、其进一步的技术方案为,根据油压变化和待放置位置检测货物运输任务的估算载荷是否超出自身的最大载荷包括:
8、当叉取待运输货物离地的过程中检测到油压上升至超出额定负载重量对应的额定油压时,确定货物运输任务的估算载荷超出自身的最大载荷;
9、当叉取待运输货物离地的过程中确定油压未超出额定负载重量对应的额定油压时,根据油压变化确定待运输货物的货物重量,并根据货物重量和待放置位置检测货物运输任务的估算载荷是否超出自身的最大载荷。
10、其进一步的技术方案为,根据货物重量和待放置位置检测货物运输任务的估算载荷是否超出自身的最大载荷包括:
11、根据货物重量对应的载荷曲线确定待放置位置的起升高度对应的载荷作为估算载荷,并检测估算载荷是否大于最大载荷;
12、其中,货物重量对应的载荷曲线指示初始叉车式agv在将具有货物重量的货物运输到不同起升高度时的载荷。
13、其进一步的技术方案为,货物运输系统实现的调度方法还包括:
14、初始叉车式agv在确定叉取待运输货物离地的过程中的油压未超出额定负载重量对应的额定油压,但估算载荷超出自身的最大载荷时,向总控制器发送位置更换请求,位置更换请求用于请求更换至起升高度小于最大高度的其他待放置位置,其中,最大高度是货物重量对应的载荷曲线中与初始叉车式agv的最大载荷对应的起升高度;
15、总控制器根据位置更换请求检测是否存在起升高度小于最大高度且空闲的其他待放置位置,当检测到存在时,向初始叉车式agv返回起升高度小于最大高度的更新后的待放置位置;当检测到不存在时,向初始叉车式agv返回位置更换失败响应;
16、初始叉车式agv在接收到更新后的待放置位置时,将待运输货物运输至更新后的待放置位置处以完成货物运输任务;
17、初始叉车式agv在接收到位置更换失败响应时,停止执行货物运输任务。
18、其进一步的技术方案为,货物运输系统实现的调度方法还包括:
19、初始叉车式agv在确定货物运输任务的估算载荷超出自身的最大载荷时,停止执行货物运输任务并向主控制器发送超限反馈信号。
20、其进一步的技术方案为,货物运输系统实现的调度方法还包括:
21、总控制器在接收到初始叉车式agv的超限反馈信号后,重新向最大载荷大于初始叉车式agv的其他叉车式agv下发货物运输任务。
22、其进一步的技术方案为,根据油压变化确定待运输货物的货物重量包括:
23、当叉取待运输货物离地的过程中检测到油压上升至达到稳定状态时,确定已经将待运输货物叉取离地,根据油压重量对应曲线确定达到稳定状态的油压对应的重量为待运输货物的货物重量;其中,油压重量对应曲线指示初始叉车式agv将不同重量的货物叉取离地时达到稳定状态的油压。
24、其进一步的技术方案为,货物运输系统实现的调度方法还包括:
25、初始叉车式agv记录待运输货物的货物重量,以及在将待运输货物运输至待放置位置的过程中的运行里程,并上传至总控制器;
26、总控制器分别汇总记录各台叉车式agv在执行各项货物运输任务时的货物重量和运行里程,并生成各台叉车式agv的工作报表,工作报表包括叉车式agv累计运输的货物重量以及累计运行里程。
27、其进一步的技术方案为,初始叉车式agv是货物运输系统中处于空闲状态且距离所述待运输货物最近的叉车式agv。
28、其进一步的技术方案为,在货物运输系统的每台叉车式agv中,液压动力单元的进油口通过液压管路连通叉车式agv的起升油缸,且液压管路上设置有切断阀;压力传感器安装在液压动力单元的进油口与切断阀之间的液压管路上。
29、本申请的有益技术效果是:
30、本申请公开了一种基于具有超限保护功能的叉车式agv的货物运输系统,该货物运输系统中的每台叉车式agv在连通起升油缸的液压管路上都加装有压力传感器,从而可以检测起升油缸的油压,利用油压来评估货物重量,然后根据油压和待放置位置即可进行载荷估算并实现超限保护,无需使用额外的称重系统,且在进行超限检测时不仅考虑货物重量,还考虑将货物运送到不同待放置位置导致的载荷变化,载荷估算和判断结果更准确,不仅可以提高省去额外的称重系统而提高效率,更有利于提高货物和agv本身的安全。
31、该货物运输系统所采用的调度方法,在初始叉车式agv触发超限保护时,可以通过更换待放置位置或者更换最大载荷更大的叉车式agv来调度,可以在保证运输安全的前提下保证货物运输任务的顺利完成。
32、当叉车式agv在执行货物运输任务的过程中,利用加装的压力传感器可以直接确定货物重量,从而对货物重量和运行里程进行记录汇总,方便使用,便于生成各台叉车式agv的工作报表,用于各台叉车式agv的利用率分析。
技术特征:
1.一种基于具有超限保护功能的叉车式agv的货物运输系统,其特征在于,所述货物运输系统包括总控制器以及若干台叉车式agv,每台叉车式agv的连通起升油缸的液压管路上安装压力传感器,存在至少两台叉车式agv的最大载荷不同;所述货物运输系统实现的调度方法包括:
2.根据权利要求1所述的货物运输系统,其特征在于,所述根据所述油压变化和待放置位置检测所述货物运输任务的估算载荷是否超出自身的最大载荷包括:
3.根据权利要求2所述的货物运输系统,其特征在于,所述根据所述货物重量和所述待放置位置检测所述货物运输任务的估算载荷是否超出自身的最大载荷包括:
4.根据权利要求3所述的货物运输系统,其特征在于,所述货物运输系统实现的调度方法还包括:
5.根据权利要求1所述的货物运输系统,其特征在于,所述货物运输系统实现的调度方法还包括:
6.根据权利要求5所述的货物运输系统,其特征在于,所述货物运输系统实现的调度方法还包括:
7.根据权利要求2所述的货物运输系统,其特征在于,所述根据所述油压变化确定所述待运输货物的货物重量包括:
8.根据权利要求2所述的货物运输系统,其特征在于,所述货物运输系统实现的调度方法还包括:
9.根据权利要求1所述的货物运输系统,其特征在于,所述初始叉车式agv是所述货物运输系统中处于空闲状态且距离所述待运输货物最近的叉车式agv。
10.根据权利要求1所述的货物运输系统,其特征在于,在所述货物运输系统的每台叉车式agv中,液压动力单元的进油口通过液压管路连通所述叉车式agv的起升油缸,且液压管路上设置有切断阀;压力传感器安装在液压动力单元的进油口与切断阀之间的液压管路上。
技术总结
本申请公开了一种基于具有超限保护功能的叉车式AGV的货物运输系统,涉及物流仓储领域,该货物运输系统包括若干台叉车式AGV,每台叉车式AGV的连通起升油缸的液压管路上安装压力传感器,初始叉车式AGV接收到货物运输任务后,在叉取待运输货物离地的过程中通过压力传感器检测油压变化,并根据油压变化和待放置位置检测货物运输任务的估算载荷是否超出自身的最大载荷从而实现超限保护;无需使用额外的称重系统,且在进行超限检测时不仅考虑货物重量,还考虑将货物运送到不同待放置位置导致的载荷变化,载荷估算和判断结果更准确,不仅可以提高省去额外的称重系统而提高效率,更有利于提高货物和AGV本身的安全。
技术研发人员:宋建涛,孙卫杰,王斯特
受保护的技术使用者:中科微至科技股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!