用于柔性电路板的收纳设备、收纳方法与流程
本技术涉及加固计算设备,例如涉及一种用于柔性电路板的收纳设备、收纳方法。
背景技术:
1、在加固计算设备领域,电路板及其上元器件通常需要满足振动冲击指标要求,因此需要有良好的隔振及防冲击措施,而刚柔耦合板上的柔性电路板因其自身的柔韧性及刚柔耦合接触点的脆弱性并不易被实施简单的隔振及防冲击措施。
2、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
2、本公开实施例提供一种用于柔性电路板的收纳设备、收纳方法,以便于对加固计算领域的刚柔耦合板上柔性电路板进行收纳。
3、在一些实施例中,所述用于柔性电路板的收纳设备,应用于加固计算机的刚柔耦合板上柔性电路板收纳,收纳设备包括中控装置、张力监测装置、张紧动作装置、收束动作装置、卷绕纠偏装置和加速度传感器:中控装置用于调节柔性电路板的张力;张力监测装置与中控装置电连接,用于获取柔性电路板内的张力,并将张力信号传送至中控装置;张紧动作装置位于张力监测装置下游,与中控装置电连接,用于张紧柔性电路板;收束动作装置包括角敏装置和卷收器,角敏装置用于感知卷收器内柔性电路板的位移状态,并将对应信号反馈至中控装置,收束动作装置用于收束柔性电路板;卷绕纠偏装置用于对柔性电路板进行位置纠偏;加速度传感器位于机架上,用于监测检测收纳设备的外部振动及冲击激振力和激振频率,并反馈至中控装置;中控装置结合反馈张力信号及角位移信号,判断冲击激振力及激振频率是否超出上限,并控制收束动作装置、张紧动作装置进行相应动作。
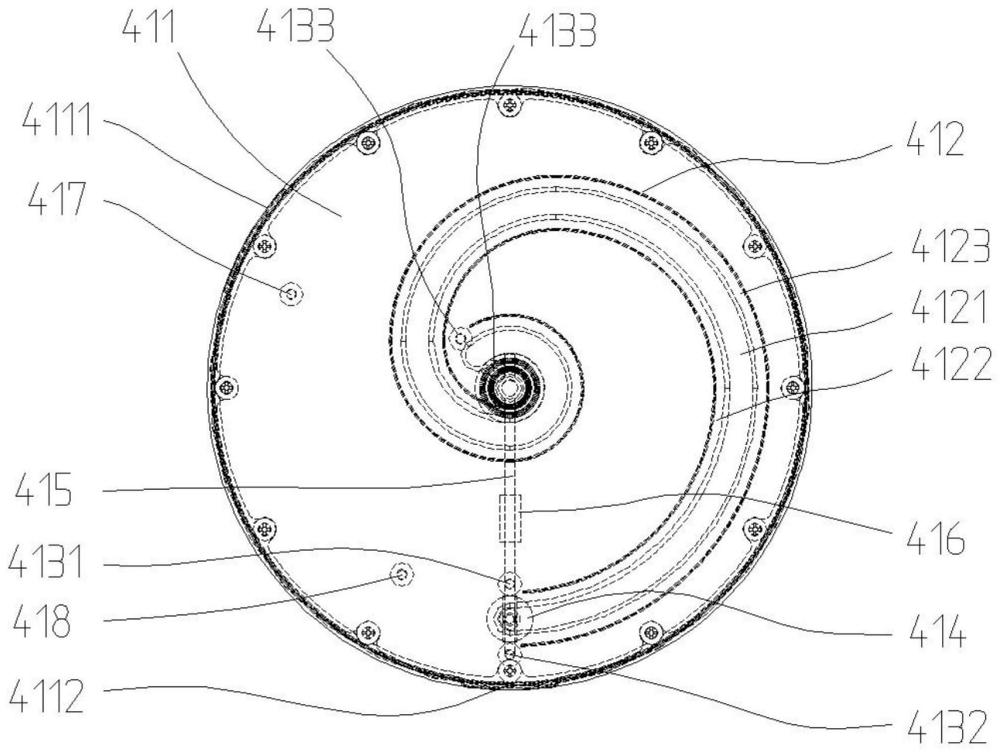
4、可选的,所述卷收器包括壳体、限位导向轮组、移动导向轮、联动连杆、平移机构和驱动电机:壳体内部设有渐开线槽,渐开线槽用于收纳柔性电路板;限位导向轮组安装在渐开线槽的端部,用于为柔性电路板导向;移动导向轮可移动安装在渐开线槽内,用于与限位导向轮组配合,带动柔性电路板移动、并为柔性电路板导向;联动连杆的第一端安装在壳体的中部,第二端与移动导向轮连接,用于带动移动导向轮在渐开线槽内移动;平移机构安装在联动连杆上,用于使联动连杆的第二端沿渐开线槽移动;驱动电机与联动连杆的第一端连接,用于驱动联动连杆转动;当卷收器收束柔性电路板时,驱动电机带动卷收器中的联动连杆沿第一方向转动,安装在联动连杆上的移动导向轮带动柔性电路板在卷收器壳体的渐开线槽内移动,同时将柔性电路板收束在渐开线槽内,完成柔性电路板收束动作。
5、可选的,渐开线槽内设置有移动槽和容纳槽,移动槽与移动导向轮的传动轴结构配合,用于为移动导向轮导向;容纳槽包括第一容纳槽和第二容纳槽,第一容纳槽和第二容纳槽分别安装在移动槽的两侧,柔性电路板从第一容纳槽的入口进入,在渐开线槽的末端变向后进入第二容纳槽,最终从第二容纳槽的出口离开。
6、可选的,限位导向轮组包括进口限位导向轮、出口限位导向轮和变向限位导向轮组,进口限位导向轮安装在第一容纳槽的进口,用于与移动导向轮配合使柔性电路板进入第一容纳槽;出口限位导向轮安装在第二容纳槽的出口,用于与移动导向轮配合使柔性电路板离开第二容纳槽;变向限位导向轮组安装在渐开线槽的末端;用于与移动导向轮配合使柔性电路板离开第一容纳槽、进入第二容纳槽。
7、可选的,角敏装置包括角位移传感器,用于感知联动连杆的转动角度,并实时反馈给中控装置,对联动连杆的转动位移实时监控。
8、可选的,张力监测装置包括张力导向轮组、张力采样轮组、张力传感器和张力变送器,张力导向轮组用于对柔性电路板导向,包括第一导向轮组和第二导向轮组;柔性电路板经第一导向轮组导向后绕过张力采样轮组再由第二导向轮组导向;张力传感器安装在张力采样轮组上,张力传感器用于获取柔性电路板内张力的信号;张力变送器用于处理张力信号,并将处理后的信号并发送至中控装置。
9、可选的,张紧动作装置包括第三导向轮组和张紧轮组,张紧轮组包括张紧轮和动作机构,柔性电路板绕经第三导向轮组后,经过张紧轮组。
10、可选的,卷绕纠偏装置包括托辊组,包括中间托辊、左侧托辊和右侧托辊,中间托辊用于支撑柔性电路板前进,左侧托辊和右侧托辊分别向外侧倾斜放置,用于对柔性电路板进行纠偏。
11、在一些实施例中,所述用于柔性电路板的收纳方法,使用前述的用于加固计算机的柔性电路板的收纳设备,收纳方法包括:
12、获取冲击激振力、激振频率;
13、确定冲击激振力、激振频率是否超出上限;
14、在未超出上限时,发出收束动作指令,使收束动作装置动作;
15、在张力监测装置监测到柔性电路板张力达到系统动作预设值时,锁定收束动作装置的卷收器的转动,并使张紧动作装置动作;
16、实时根据外部激振力及激振频率的变化而同步调整柔性电路板上的张力,直至使外界激振频率与固有频率的比值小于1,并根据外部变化同步调整张力。
17、可选的,收纳方法还包括:
18、在收纳设备上电后,对收纳设备进行自检;
19、在收到子装置传感器的异常信号数据时,发出刹车指令和报警指令,使收纳设备的各驱动装置刹车并发出警示信号;或,
20、在未收到异常信号数据时,确定加速度传感器的传递数据是否异常;
21、在收到异常加速度传感器的传递数据时,发出刹车指令和报警指令,使收纳设备的各驱动装置刹车并发出警示信号。
22、需要说明的是,一般而言,工程实际中的振动系统都是连续实体,其质量与刚度连续分布,理论上具有无限多个自由度,严格来讲需要用连续模型才能加以描述,但是连续体的振动分析涉及偏微分方程理论,求解也十分困难,而且大多偏微分方程不存在解析解。同时,大量的复杂振动系统无法简化为单自由度系统,而是需要简化为多自由度系统才能反映实际问题的力学本质。由此,工程实践中的许多连续弹性体,通常是采用适当的方法将其简化为有限多个自由度的模型来分析。
23、因此,为了简化分析,实际演算过程中经常将连续体简化为多自由度系统。需要指出的是,一个振动系统,如果其振动幅度没有限制,则振动方程中的广义坐标及其对时间的微商(广义速度、广义加速度)一般以非线性形式存在;但如果系统振动的幅度很小,以至于振动方程中只需保留广义坐标及其时间微商的一阶项就足够精确,则可以用线性微分方程描述该系统。
24、以其中某一自由度为例进行受力分析,叠加后可得到系统的动力学方程如下:
25、
26、式中,m、c、k分别为质量矩阵、阻尼矩阵和刚度矩阵,用于柔性电路板的收纳设备、收纳方法为系统的位移矩阵,f(t)为装置外部激振力。使用计算机辅助可以求解出系统的一阶模态下固有频率ωn及其相应的模态振型。
27、调节柔性电路板上的张力f柔,可以调节其固有频率。为避免柔性电路板发生共振,就要实时监控并改变柔性电路板上的张力,使得外界激振频率ω(t)与其固有频率ωn的比值λ小于1,此时柔性电路板上的张力f柔与装置外部激振力f(t)的比值β变小,从而达到减振的目的。除此之外,也可以增大系统阻尼比,也可以使得柔性电路板上的张力f柔与装置外部激振力f(t)的比值β变小,从而达到减振的目的。
28、本公开实施例提供的用于柔性电路板的收纳设备、收纳方法,可以实现以下技术效果:
29、本公开通过位于中控装置的加速度传感器实时感知并监控系统受到的外部激振力f(t)及激振频率ω(t),同时传递给柔性电路板监测及张紧装置,实时调节刚柔耦合板上柔性电路板上的张力,改变系统的刚度系数,使外界激振频率ω(t)与其固有频率ωn的比值λ小于1。与此同时该设备通过柔性电路板收束装置可以在收束多余柔性电路板的同时,增强电子产品的隔振及防冲击性能。
30、以上的总体描述和下文中的描述仅是示例性和解释性的,不用于限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!