基于磁悬浮轨道的动子控制方法和装置、系统及介质与流程
本申请涉及输送领域,尤其涉及一种基于磁悬浮轨道的动子控制方法和装置、系统及介质。
背景技术:
1、目前,磁悬浮轨道在工业自动化领域的应用较为广泛,如磁驱输送线可用于精密零部件的输送和装配。但是,在磁悬浮轨道竖直摆放的情况下,磁驱输送线弯曲部分的驱动器一旦失去供电,磁驱输送线上的动子就会因为重力而滑落下来。动子在磁悬浮轨道断电时不可控的问题,影响着使用磁悬浮轨道输送动子的安全性。因此,如何在磁悬浮轨道突然断电时停靠动子,成为了亟待解决的技术问题。
技术实现思路
1、本申请实施例的主要目的在于提出一种基于磁悬浮轨道的动子控制方法和装置、系统及介质,旨在于竖直摆放的磁悬浮轨道断电时停靠动子。
2、为实现上述目的,本申请实施例的第一方面提出了一种基于磁悬浮轨道的动子控制方法,所述磁悬浮轨道以竖直方向摆放,所述磁悬浮轨道被预先划分为急停区域、停止区域和勿停区域,所述勿停区域为所述磁悬浮轨道的弯道区域,所述方法包括:
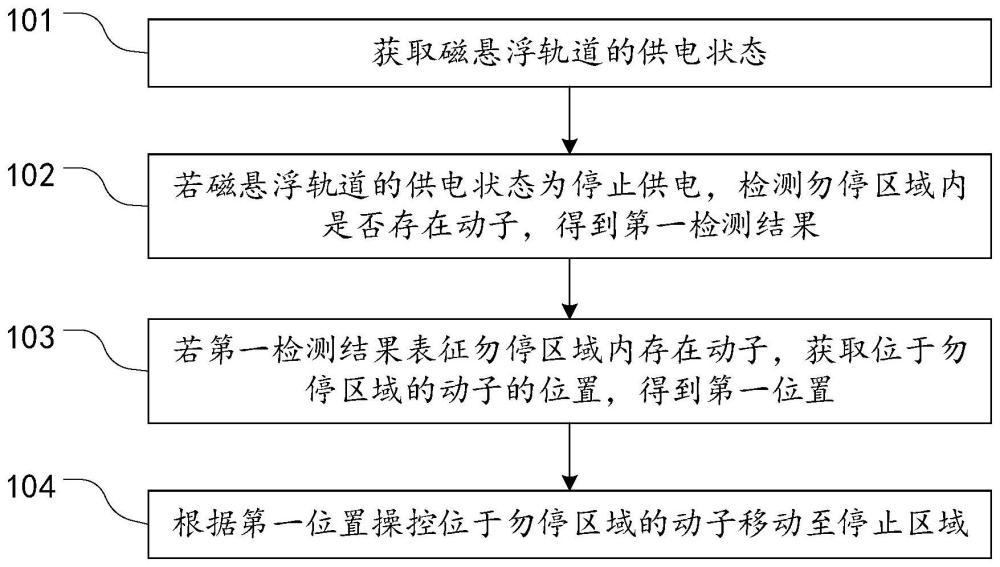
3、获取磁悬浮轨道的供电状态;
4、若所述磁悬浮轨道的供电状态为停止供电,检测所述勿停区域内是否存在动子,得到第一检测结果;
5、若所述第一检测结果表征所述勿停区域内存在所述动子,获取位于所述勿停区域的所述动子的位置,得到第一位置;
6、根据所述第一位置,操控位于所述勿停区域的所述动子移动至所述停止区域。
7、在一些实施例,在所述根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域之前,所述方法还包括:
8、若所述第一检测结果表征所述勿停区域内存在所述动子,检测所述停止区域内是否存在所述动子,得到第二检测结果;
9、若所述第二检测结果表征所述停止区域内存在所述动子,将位于所述停止区域的所述动子沿远离所述勿停区域的方向移动。
10、在一些实施例,所述若所述第二检测结果表征所述停止区域内存在所述动子,将位于所述停止区域的所述动子沿远离所述勿停区域的方向移动,包括:
11、若所述第二检测结果表征所述停止区域内存在所述动子,获取位于所述停止区域的所述动子的位置,得到第二位置;
12、根据所述第一位置、所述第二位置和预设间距,确定位于所述停止区域和所述勿停区域的所述动子的移动距离;
13、根据所述移动距离移动位于所述停止区域和所述勿停区域的所述动子;其中,所述预设间距为移动后位于所述停止区域的所述动子之间的距离。
14、在一些实施例,所述根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域,包括:
15、将所述第一位置和预设分界位置进行比较;其中,所述预设分界位置位于所述勿停区域的中部;
16、若所述第一位置在所述预设分界位置的上方,操控位于所述勿停区域的所述动子移动到上方的所述停止区域;
17、若所述第一位置在所述预设分界位置的下方,操控位于所述勿停区域的所述动子移动到下方的所述停止区域。
18、在一些实施例,在所述检测所述勿停区域内是否存在动子,得到第一检测结果之后,所述方法还包括:
19、若所述第一检测结果表征所述勿停区域内不存在所述动子,将所有的所述动子停止。
20、在一些实施例,所述磁悬浮轨道还设有驱动模组和预设电容,所述驱动模组用于驱动所述动子移动,所述根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域,包括:
21、将所述预设电容中的电能提供给位于所述勿停区域的所述驱动模组,通过所述驱动模组操控位于所述勿停区域的所述动子移动至所述停止区域。
22、在一些实施例,所述若所述第二检测结果表征所述停止区域内存在所述动子,将位于所述停止区域的所述动子沿远离所述勿停区域的方向移动,包括:
23、若所述第二检测结果表征所述停止区域内存在所述动子,将所述预设电容中的电能提供给位于所述停止区域的所述驱动模组,通过所述驱动模组操控位于所述停止区域的所述动子沿远离所述勿停区域的方向移动。
24、为实现上述目的,本申请实施例的第二方面提出了一种基于磁悬浮轨道的动子控制装置,所述磁悬浮轨道以竖直方向摆放,所述磁悬浮轨道被预先划分为急停区域、停止区域和勿停区域,所述勿停区域为所述磁悬浮轨道的弯道区域,所述装置包括:
25、状态获取模块,用于获取磁悬浮轨道的供电状态;
26、第一检测模块,用于若所述磁悬浮轨道的供电状态为停止供电,检测所述勿停区域内是否存在动子,得到第一检测结果;
27、第一位置获取模块,用于若所述第一检测结果表征所述勿停区域内存在所述动子,获取位于所述勿停区域的所述动子的位置,得到第一位置;
28、移动模块,用于根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域。
29、为实现上述目的,本申请实施例的第三方面提出了一种基于磁悬浮轨道的动子控制系统,所述系统执行上述第一方面所述的方法,所述系统包括:所述磁悬浮轨道和所述动子;其中,所述动子沿着所述磁悬浮轨道移动,所述动子上设置有磁栅,所述磁悬浮轨道上设置有传感器,所述传感器用于感应所述动子上的所述磁栅。
30、为实现上述目的,本申请实施例的第四方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
31、本申请提出的基于磁悬浮轨道的动子控制方法和装置、系统及介质,其在竖直摆放的磁悬浮轨道断电时,通过检测动子在轨道上的位置,操控位于勿停区域的动子移动至停止区域,从而避免磁悬浮轨道突然断电时,动子因为重力而从轨道的弯道区域上滑落下来,达到确保动子安全停放的技术目的。
技术特征:
1.一种基于磁悬浮轨道的动子控制方法,其特征在于,所述磁悬浮轨道以竖直方向摆放,所述磁悬浮轨道被预先划分为急停区域、停止区域和勿停区域,所述勿停区域为所述磁悬浮轨道的弯道区域,所述方法包括:
2.根据权利要求1所述的基于磁悬浮轨道的动子控制方法,其特征在于,在所述根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域之前,所述方法还包括:
3.根据权利要求2所述的基于磁悬浮轨道的动子控制方法,其特征在于,所述若所述第二检测结果表征所述停止区域内存在所述动子,将位于所述停止区域的所述动子沿远离所述勿停区域的方向移动,包括:
4.根据权利要求1所述的基于磁悬浮轨道的动子控制方法,其特征在于,所述根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域,包括:
5.根据权利要求1所述的基于磁悬浮轨道的动子控制方法,其特征在于,在所述检测所述勿停区域内是否存在动子,得到第一检测结果之后,所述方法还包括:
6.根据权利要求2所述的基于磁悬浮轨道的动子控制方法,其特征在于,所述磁悬浮轨道还设有驱动模组和预设电容,所述驱动模组用于驱动所述动子移动,所述根据所述第一位置操控位于所述勿停区域的所述动子移动至所述停止区域,包括:
7.根据权利要求6所述的基于磁悬浮轨道的动子控制方法,其特征在于,所述若所述第二检测结果表征所述停止区域内存在所述动子,将位于所述停止区域的所述动子沿远离所述勿停区域的方向移动,包括:
8.一种基于磁悬浮轨道的动子控制装置,其特征在于,所述磁悬浮轨道以竖直方向摆放,所述磁悬浮轨道被预先划分为急停区域、停止区域和勿停区域,所述勿停区域为所述磁悬浮轨道的弯道区域,所述装置包括:
9.一种基于磁悬浮轨道的动子控制系统,其特征在于,所述系统执行如权利要求1至7中任一项所述的基于磁悬浮轨道的动子控制方法,所述系统包括:所述磁悬浮轨道和所述动子;其中,所述动子沿着所述磁悬浮轨道移动,所述动子上设置有磁栅,所述磁悬浮轨道上设置有传感器,所述传感器用于感应所述动子上的所述磁栅。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的基于磁悬浮轨道的动子控制方法。
技术总结
本申请实施例提供了一种基于磁悬浮轨道的动子控制方法和装置、系统及介质,属于输送技术领域。该方法包括:获取磁悬浮轨道的供电状态;若磁悬浮轨道的供电状态为停止供电,检测勿停区域内是否存在动子,得到第一检测结果;若第一检测结果表征勿停区域内存在动子,获取位于勿停区域的动子的位置,得到第一位置;根据第一位置操控位于勿停区域的动子移动至停止区域。本申请实施例能够在竖直摆放的磁悬浮轨道断电时,通过检测动子在轨道上的位置,操控位于勿停区域的动子移动至停止区域,从而避免磁悬浮轨道突然断电时动子因为重力而从轨道的弯道区域上滑落下来,确保动子安全停放。
技术研发人员:卢红星,唐冰奇,叶进余
受保护的技术使用者:苏州纵苇科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!