一种自动装盘机及其摆盘方法与流程
本发明涉及自动化设备,尤其涉及一种自动装盘机及其摆盘方法。
背景技术:
1、目前,对于散装小零件摆盘包装,一种是采用人工进行包装,然而人力成本较高,另一种是采用自动化设备进行包装,替代人工,节约成本。自动化设备包括机器人和上料器,机器人从上料器抓取物料摆放于托盘内,从而实现自动化摆盘。然而,物料在上料器中比较杂乱,因此机器人通常每次抓取一个物料,以能精确地将物料摆放在托盘中,导致效率低下。
技术实现思路
1、本发明的目的在于提供一种自动装盘机及其摆盘方法,实现同时将多个物料自动化地、精确地摆放在摆盘中,以提高作业效率。
2、为达此目的,本发明采用以下技术方案:
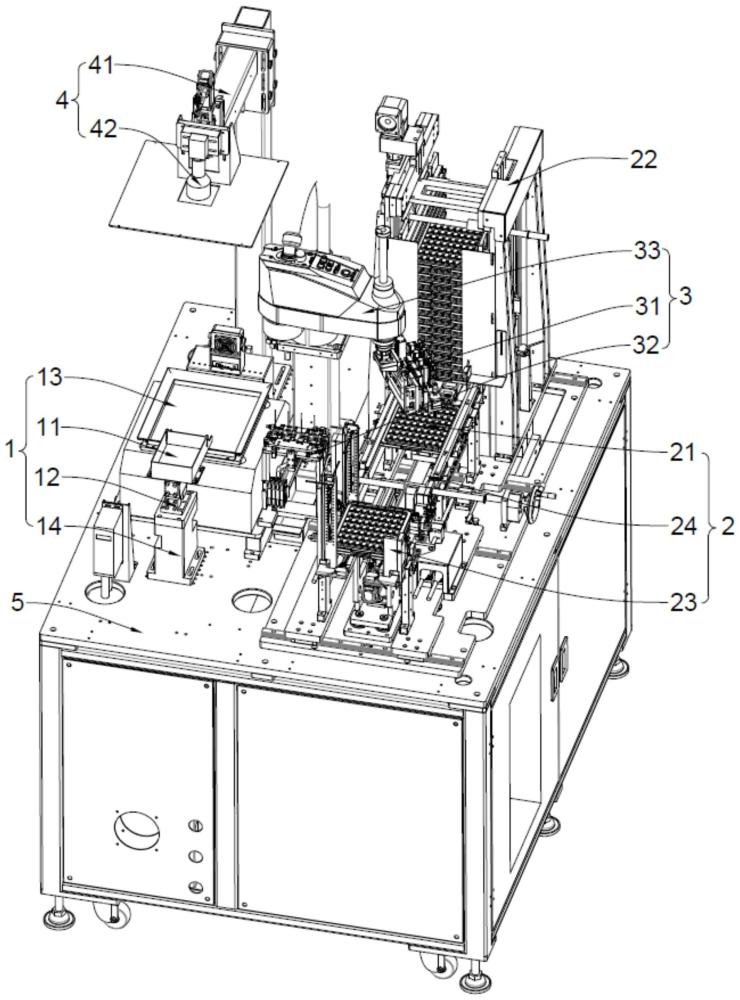
3、一种自动装盘机,包括上料模组、下料模组和取放料模组,所述下料模组包括托盘,所述取放料模组包括:
4、取放机构,用于取放多个物料,且能够校正多个所述物料使多个物料位于第一预设位置;
5、校正机构,用于校正多个所述物料使所述物料位于第二预设位置;
6、机械手,所述取放机构连接于所述机械手的末端,以使所述取放机构分别与所述上料模组、所述托盘和所述校正机构对接。
7、在一些可能的实施方式中,所述取放机构包括调节组件和多个取料组件,所述取料组件与所述物料一一对应,所述取料组件包括升降驱动件和连接于所述升降驱动件输出端的取料件,所述调节组件能够校正所述取料件的位置。
8、在一些可能的实施方式中,所述调节组件包括多个旋转驱动件,所述旋转驱动件和所述取料组件一一对应,所述旋转驱动件连接于所述升降驱动件和所述取料件之间。
9、在一些可能的实施方式中,所述调节组件包括第一固定板、第二固定板、第三固定板和间距驱动件,所述第一固定板连接于所述机械手,第三固定板固定连接于所述第一固定板,所述间距驱动件固定于所述第一固定板且能够驱动所述第二固定板沿所述第一方向移动,所述取料组件沿第二方向滑动连接于所述第二固定板且沿第三方向滑动连接于所述第三固定板。
10、在一些可能的实施方式中,所述校正机构包括定位块、第一定位驱动组件和第二定位驱动组件,所述定位块设有多个定位槽,所述物料能够一一对应地位于所述定位槽内,所述第一定位驱动组件能够沿一个方向驱动多个所述物料移动,所述第二定位驱动组件能够沿另一个方向驱动多个所述物料移动,以使所述物料位于第二预设位置。
11、在一些可能的实施方式中,还包括检测模组,用于检测所述上料模组中的所述物料,所述检测模组与所述取放料模组通讯连接。
12、在一些可能的实施方式中,所述上料模组包括供料仓、振动机及振动盘模组,所述供料仓连接于所述振动机,所述供料仓的出口与所述振动盘模组对接以将所述供料仓内的物料送料至所述振动盘模组,所述振动盘模组能够将所述物料振动至预设状态。
13、在一些可能的实施方式中,所述下料模组包括滑轨、空盘仓、收盘仓和运载机构,所述滑轨分别与所述空盘仓和所述收盘仓对接,所述运载机构能够沿所述滑轨抵推所述托盘,所述机械手使所述取放机构能够与预设位置的所述托盘对接。
14、在一些可能的实施方式中,所述运载机构包括输送驱动件和挡块组件,所述输送驱动件能够通过所述挡块组件抵推所述托盘,所述挡块组件包括支承块、转轴、弹性件和挡块,所述挡块的第一端通过所述转轴转动连接于所述支承块,第二端通过所述弹性件连接于所述支承块,所述挡块具有斜面,且第二端的高度高于第一端的高度,所述第一端抵接于所述支承块,所述第二端能够抵推所述托盘。
15、一种如上述的自动装盘机的摆盘方法,包括:
16、机械手驱动取放机构与上料模组对接,进行取物料;
17、所述取放机构校正所述物料,使所述物料位于第一预设位置;
18、所述机械手驱动所述取放机构与校正机构对接,将所述物料放入所述校正机构;
19、所述校正机构校正所述物料,使所述物料位于第二预设位置;
20、所述机械手驱动所述取放机构与校正机构对接,将所述物料从所述校正机构取出;
21、所述机械手驱动所述取放机构与下料模组对接,将所述物料摆放于托盘。
22、本发明的有益效果:
23、本发明提供的一种自动装盘机及其摆盘方法,机械手驱动取放机构在上料模组处取多个物料,取放机构对多个物料进行校正,使物料位于第一预设位置,以便于能够放入校正机构中,之后机械手驱动取放机构将物料放入校正机构,校正机构对多个物料进行校正,使物料位于第二预设位置,以便于能够放入托盘的预设位置,之后机械手驱动取放机构将物料从校正机构取出并放入托盘中,实现了多个物料自动化地、精确地摆放在摆盘中,提高了作业效率。
技术特征:
1.一种自动装盘机,其特征在于,包括上料模组(1)、下料模组(2)和取放料模组(3),所述下料模组(2)包括托盘(21),所述取放料模组(3)包括:
2.根据权利要求1所述的自动装盘机,其特征在于,所述取放机构(31)包括调节组件(311)和多个取料组件(312),所述取料组件(312)与所述物料(100)一一对应,所述取料组件(312)包括升降驱动件(3121)和连接于所述升降驱动件(3121)输出端的取料件(3122),所述调节组件(311)能够校正所述取料件(3122)的位置。
3.根据权利要求2所述的自动装盘机,其特征在于,所述调节组件(311)包括多个旋转驱动件(3111),所述旋转驱动件(3111)和所述取料组件(312)一一对应,所述旋转驱动件(3111)连接于所述升降驱动件(3121)和所述取料件(3122)之间。
4.根据权利要求2所述的自动装盘机,其特征在于,所述调节组件(311)包括第一固定板(3112)、第二固定板(3113)、第三固定板(3114)和间距驱动件(3115),所述第一固定板(3112)连接于所述机械手(33),第三固定板(3114)固定连接于所述第一固定板(3112),所述间距驱动件(3115)固定于所述第一固定板(3112)且能够驱动所述第二固定板(3113)沿第一方向移动,所述取料组件(312)沿第二方向滑动连接于所述第二固定板(3113)且沿第三方向滑动连接于所述第三固定板(3114)。
5.根据权利要求1所述的自动装盘机,其特征在于,所述校正机构(32)包括定位块(321)、第一定位驱动组件(322)和第二定位驱动组件(323),所述定位块(321)设有多个定位槽(3211),所述物料(100)能够一一对应地位于所述定位槽(3211)内,所述第一定位驱动组件(322)能够沿一个方向驱动多个所述物料(100)移动,所述第二定位驱动组件(323)能够沿另一个方向驱动多个所述物料(100)移动,以使所述物料(100)位于第二预设位置。
6.根据权利要求1所述的自动装盘机,其特征在于,还包括检测模组(4),用于检测所述上料模组(1)中的所述物料(100),所述检测模组(4)与所述取放料模组(3)通讯连接。
7.根据权利要求1所述的自动装盘机,其特征在于,所述上料模组(1)包括供料仓(11)、振动机(12)及振动盘模组(13),所述供料仓(11)连接于所述振动机(12),所述供料仓(11)的出口与所述振动盘模组(13)对接以将所述供料仓(11)内的所述物料(100)送料至所述振动盘模组(13),所述振动盘模组(13)能够将所述物料(100)振动至预设状态。
8.根据权利要求1所述的自动装盘机,其特征在于,所述下料模组(2)包括滑轨(25)、空盘仓(22)、收盘仓(23)和运载机构(24),所述滑轨(25)分别与所述空盘仓(22)和所述收盘仓(23)对接,所述运载机构(24)能够沿所述滑轨(25)抵推所述托盘(21),所述机械手(33)使所述取放机构(31)能够与预设位置的所述托盘(21)对接。
9.根据权利要求8所述的自动装盘机,其特征在于,所述运载机构(24)包括输送驱动件和挡块组件(241),所述输送驱动件能够通过所述挡块组件(241)抵推所述托盘(21),所述挡块组件(241)包括支承块(2411)、转轴(2412)、弹性件(2413)和挡块(2414),所述挡块(2414)的第一端通过所述转轴(2412)转动连接于所述支承块(2411),第二端通过所述弹性件(2413)连接于所述支承块(2411),所述挡块(2414)具有斜面(24141),且第二端的高度高于第一端的高度,所述第一端抵接于所述支承块(2411),所述第二端能够抵推所述托盘(21)。
10.一种如权利要求1-9任一项所述的自动装盘机的摆盘方法,其特征在于,包括:
技术总结
本发明公开了一种自动装盘机及其摆盘方法,属于自动化设备技术领域。自动装盘机包括上料模组、下料模组和取放料模组,下料模组包括托盘,取放料模组包括取放机构、校正机构和机械手,取放机构用于取放多个物料,且能够校正多个物料使多个物料位于第一预设位置;校正机构用于校正多个物料使物料位于第二预设位置;取放机构连接于机械手的末端,以使取放机构分别与上料模组、托盘和校正机构对接。本发明的自动装盘机及其摆盘方法,实现同时将多个物料自动化地、精确地摆放在摆盘中,以提高作业效率。
技术研发人员:张亚飞,鲍欣欣,丁金华,孙云飞,赵博,吴乐斌,吴越建
受保护的技术使用者:立讯智造科技(常熟)有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!