一种电芯卷绕纠偏控制装置及控制方法与流程
本发明涉及电芯卷绕制备,具体涉及一种电芯卷绕纠偏控制装置及控制方法。
背景技术:
1、近年来,电动汽车市场呈现出快速增长的趋势,动力电池作为电动汽车的关键技术之一,也在不断发展和创新。而动力电池的性能和成本对电动汽车的续航里程、安全性和价格等方面都有着重要影响。目前,锂电池是主流的动力电池技术,具有较高的能量密度和循环寿命。
2、卷绕是锂离子电芯制造中最为关键的工序,卷绕是将阳极-隔膜-阴极交替排列卷绕在一起,其要求阳极、阴极和隔膜在长度和宽度方向有一定的错位(隔膜包极片,阳极包阴极),即它们之间必须有包覆量overhang,如果出现overhang不良,将会影响电池的安全性能,最终危及消费者的人身安全。在实际生产过程中,前工序极片分切时导致波浪边等不良,仅仅靠纠偏传感器很难保证纠偏精度,需要导入基于机器视觉的卷绕overhang闭环控制系统,来进一步保证纠偏精度。在现有的overhang检测和纠偏系统中,仍然存在一些不足之处,如相关技术公开了一种锂电池卷绕overhang对中纠偏控制系统及方法,通过视觉系统计算阴极极片边缘相对于阳极极片边缘的oh值及目标标准值,并将测量结果发送至纠偏系统进行对中纠偏。但是该方法只能测量阴极和阳极极片与上隔膜之间的overhang,遗漏了下隔膜和阴极极片和阳极极片之间的overhang进行测量,因此会导致纠偏控制不精确。
技术实现思路
1、有鉴于此,本发明提供了一种电芯卷绕纠偏控制装置及控制方法,以解决现有技术中overhang测量不全面导致纠偏控制不精确的问题。
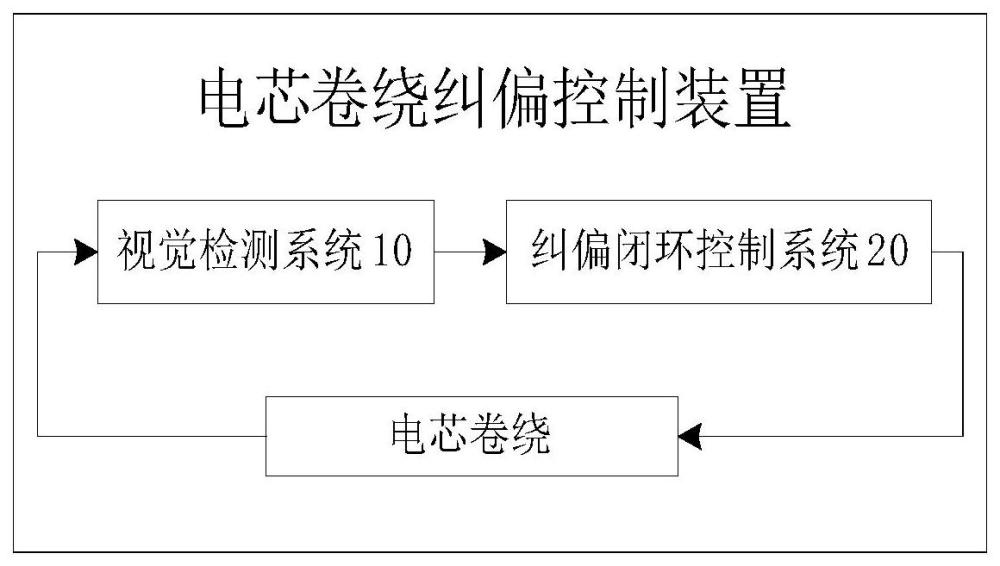
2、第一方面,本发明提供了一种电芯卷绕纠偏控制装置,装置包括:
3、视觉检测系统,用于在多个极片和多个隔膜卷绕过程中,采集极片-隔膜图像,并基于基准线对极片-隔膜图像进行处理分析,得到第一数据,第一数据包括:不同极片之间的包覆量、不同隔膜之间的包覆量,以及极片和隔膜之间的包覆量中的至少一个;
4、纠偏闭环控制系统,用于判断第一数据是否超出预设阈值,若任一包覆量超出预设阈值则以任一极片或任一隔膜为基准,控制其他极片和隔膜移动进行纠偏。
5、本发明实施例提供的电芯卷绕纠偏控制装置,通过视觉检测系统采集极片-隔膜图像,并基于基准线对极片-隔膜图像进行处理分析,获取极片之间、隔膜之间或极片和隔膜之间的包覆量,通过纠偏闭环控制系统根据包覆量进行极片或隔膜的纠偏调整。本发明根据同一基准线对电芯卷绕中极片和隔膜之间包覆量进行计算,能够提高包覆量的测量精度,并对所有极片和隔膜进行全面测量,从而提高纠偏控制的精准性,保证电芯质量。
6、在一种可选的实施方式中,视觉检测系统包括:图像采集模块、图像处理模块和数据处理模块;图像采集模块,用于采集阳极极片-下隔膜图像和阴极极片-上隔膜图像;图像处理模块,用于对阳极极片-下隔膜图像和阴极极片-上隔膜图像依次进行预处理、图像分割和边缘提取,获取阳极极片边缘、阴极极片边缘、上隔膜边缘和下隔膜边缘;数据处理模块,用于计算阳极极片边缘与基准线的距离、阴极极片边缘与基准线的距离、上隔膜边缘与基准线的距离和下隔膜边缘与基准线的距离,并根据计算得到的距离信息计算阳极极片和阴极极片之间的包覆量、阳极极片与下隔膜之间的包覆量、阴极极片与上隔膜之间的包覆量和上隔膜与下隔膜之间的包覆量。
7、本发明通过视觉检测系统进行图像采集、图像处理和数据处理,能够获得阳极极片与阴极极片之间的包覆量、阳极极片和下隔膜之间的包覆量、以及阴极极片和上隔膜之间的包覆量,从而实现对卷绕过程overhang的全面测量。
8、在一种可选的实施方式中,图像采集模块包括:第一图像采集单元、第二图像采集单元、第三图像采集单元和第四图像采集单元;第一图像采集单元固定于收卷辊的有极耳一侧,用于采集阴极极片-上隔膜顶部图像;第二图像采集单元固定于收卷辊的无极耳一侧,用于采集阴极极片-上隔膜底部图像;第三图像采集单元固定于下隔膜的有极耳一侧,用于采集阳极极片-下隔膜顶部图像;第四图像采集单元固定于下隔膜的无极耳一侧,用于采集阳极极片-下隔膜底部图像。
9、本发明通过安装在收卷辊两侧和下隔膜两侧的图像采集单元,能够获取不同极片与不同隔膜之间对应的顶部图像和底部图像,即既对卷绕过程的不同对极片和隔膜的overhang进行测量,也对同一对极片和隔膜两侧的overhang进行测量,提升测量的全面性,从而保证纠偏控制的精确性,并且整个纠偏控制系统的结构简单,成本低,系统执行效率和可靠性高,检测时间短,能大大提高检测效率。
10、第二方面,本发明提供了一种电芯卷绕纠偏控制方法,应用于基于第一方面的装置的纠偏闭环控制系统,方法包括:
11、在多个极片和多个隔膜卷绕过程中,获取由视觉检测系统基于基准线对采集的极片-隔膜图像进行处理分析,得到的第一数据,第一数据包括:不同极片之间的包覆量、不同隔膜之间的包覆量,以及极片和隔膜之间的包覆量;
12、判断第一数据是否超出预设阈值,若任一包覆量超出预设阈值则以任一极片或任一隔膜为基准,控制其他极片和隔膜移动进行纠偏。
13、本发明实施例提供的电芯卷绕纠偏控制方法,通过获取视觉检测系统基于基准线对采集的极片-隔膜图像进行处理分析,得到的极片之间、隔膜之间或极片和隔膜之间的包覆量,通过纠偏闭环控制系统根据包覆量进行极片或隔膜的纠偏调整。本发明根据同一基准线对电芯卷绕中极片和隔膜之间包覆量进行计算,能够提高包覆量的测量精度,并对所有极片和隔膜进行全面测量,从而提高纠偏控制的精准性,保证电芯质量。
14、在一种可选的实施方式中,视觉检测系统基于基准线对采集的极片-隔膜图像进行处理分析,得到的第一数据的过程,包括:视觉检测系统的图像采集模块内第一图像采集单元采集阴极极片-上隔膜顶部图像,第二图像采集单元采集阴极极片-上隔膜底部图像,第三图像采集单元采集阳极极片-下隔膜顶部图像,第四图像采集单元采集阳极极片-下隔膜底部图像;视觉检测系统的图像处理模块依次对阴极极片-上隔膜顶部图像、阴极极片-上隔膜底部图像、阳极极片-下隔膜顶部图像、阳极极片-下隔膜底部图像进行预处理、图像分割和边缘提取,获取阴极极片顶部边缘和阴极极片底部边缘、上隔膜顶部边缘和上隔膜底部边缘、阳极极片顶部边缘和阳极极片底部边缘,以及下隔膜顶部边缘和下隔膜底部边缘;视觉检测系统的数据处理模块依次计算阴极极片顶部边缘与基准线之间的第一距离,阳极极片顶部边缘与基准线之间的第二距离,阴极极片底部边缘与基准线之间的第三距离,阳极极片底部边缘与基准线之间的第四距离,上隔膜顶部边缘与基准线之间的第五距离,上隔膜底部边缘与基准线之间的第六距离,下隔膜顶部边缘与基准线之间的第七距离,下隔膜底部边缘与基准线之间的第八距离;以第一距离和第二距离的差值作为阳极极片和阴极极片之间的顶部包覆量,以第三距离和第四距离的差值作为阳极极片和阴极极片之间的底部包覆量,以第一距离和第五距离的差值作为阴极极片和上隔膜之间的顶部包覆量,以第三距离和第六距离的差值作为阴极极片和上隔膜之间的底部包覆量,以第二距离和第七距离的差值作为阳极极片和下隔膜之间的顶部包覆量,以第四距离和第八距离的差值作为阳极极片和下隔膜之间的底部包覆量,以第五距离和第七距离的差值作为上隔膜和下隔膜之间的顶部包覆量,以第六距离和第八距离的差值作为上隔膜和下隔膜之间的底部包覆量。
15、本发明通过视觉检测系统进行图像采集、图像处理和数据处理,能够获得阳极极片与阴极极片之间的顶部和底部包覆量、阳极极片和下隔膜之间的顶部和包覆量、以及阴极极片和上隔膜之间的顶部和底部包覆量,从而实现对卷绕过程overhang的全面测量,进一步根据测量得到的多种overhang进行纠偏,能够提高纠偏控制精准性。
16、在一种可选的实施方式中,基准线的确定过程,包括:以第一次图像采集过程中获得所述上隔膜顶部边缘和所述下隔膜顶部边缘为所述阴极极片-上隔膜顶部图像和所述阳极极片-下隔膜顶部图像中第一基准边;在距离所述第一基准边的预设数量像素处设置第一基准线;获取所述第一基准线的第一像素坐标;在后续图像采集过程中在所述阴极极片-上隔膜顶部图像和所述阳极极片-下隔膜顶部图像中按照所述第一像素坐标确定所述第一基准线;以第一次图像采集过程中获得所述上隔膜底部边缘和所述下隔膜底部边缘为所述阴极极片-上隔膜底部图像和所述阳极极片-下隔膜底部图像中第二基准边;在距离所述第二基准边的预设数量像素处设置第二基准线;获取所述第二基准线的第二像素坐标;在后续图像采集过程中在所述阴极极片-上隔膜底部图像和所述阳极极片-下隔膜底部图像中按照所述第二像素坐标确定所述第二基准线。
17、本发明通过在第一次采集的图像中根据隔膜边缘设定基准线,在后续图像处理过程中均按照同一基准线计算不同极片之间或不同极片与隔膜之间的包覆量,相当于对同一极片和隔膜进行图像采集的不同相机进行标定,能够提高包覆量的测量精度,从而进一步提高纠偏控制的精准性。
18、在一种可选的实施方式中,在判断第一数据是否超出预设阈值之前,还包括:按照预设滞后量获取多组电芯卷绕过程中不同极片之间、不同隔膜之间或极片和隔膜之间的多个顶部包覆量和多个底部包覆量;分别对多个顶部包覆量和多个底部包覆量求平均,获得第一顶部包覆量均值和第一底部包覆量均值;将多个顶部包覆量和多个底部包覆量中的异常值进行剔除;对异常值剔除后的多个顶部包覆量和多个底部包覆量求平均,获得异常值剔除后的第二顶部包覆量均值和第二底部包覆量均值。
19、本发明考虑到卷绕速度和纠偏控制系统的处理速度设定滞后量,通过已完成的多组电芯卷绕过程中包覆量的平均值对当前卷绕过程的包覆量进行调整,能够提高纠偏控制的稳定性,也能够满足实际纠偏控制系统的处理速度。
20、在一种可选的实施方式中,判断第一数据是否超出预设阈值的过程,包括:计算第二底部包覆量均值与预设包覆量标准值之间的第一差值,将第一差值的绝对值作为第一偏移量;判断第一偏移量是否超出预设阈值。
21、本发明考虑到在卷绕过程中底部overhang为主动尺寸,顶部overhang为从动尺寸,因此通过标准值比较模式选择对底部包覆量进行判断,能够快速确定当前包覆量是否满足卷绕条件。
22、在一种可选的实施方式中,判断第一数据是否超出预设阈值的过程,包括:计算当前电芯卷绕过程中得到的顶部包覆量和底部包覆量之间的第二差值,并将第二差值作为相对偏移量;计算第一顶部包覆量均值与相对偏移量之间的第三差值;计算第一底部包覆量均值与第三差值之间的第四差值,并将第四差值的绝对值作为第二偏移量;判断第二偏移量是否超出预设阈值。
23、本发明通过综合考虑底部overhang为主动尺寸,顶部overhang为从动尺寸,通过相对值比较模式计算偏移量,能够提高判断精度,从而进一步提高纠偏的精准性。
24、在一种可选的实施方式中,以任一极片或任一隔膜为基准,控制其他极片和隔膜移动进行纠偏的过程,包括:获取纠偏闭环控制系统的前一次纠偏调节量;计算预设滞后量之前的第二底部包覆量均值与预设滞后量之后的第二底部包覆量均值之间的第五差值;将前一次纠偏调节量和第五差值的比值的绝对值作为调机系数;计算第一差值与调机系数的乘积,得到纠偏调节量;选取阳极极片、阴极极片、上隔膜或下隔膜为基准,并根据纠偏调节量控制其他极片或隔膜进行移动调整。
25、在一种可选的实施方式中,以任一极片或任一隔膜为基准,控制其他极片和隔膜移动进行纠偏的过程,包括:获取纠偏闭环控制系统的前一次纠偏调节量;计算预设滞后量之前的第二底部包覆量均值与预设滞后量之后的第二底部包覆量均值之间的第五差值;将前一次纠偏调节量和第五差值的比值的绝对值作为调机系数;计算第二偏移量与调机系数的乘积,并基于乘积结果的预设比例得到纠偏调节量;选取阳极极片、阴极极片、上隔膜或下隔膜为基准,并根据纠偏调节量控制其他极片或隔膜进行移动调整。
26、本发明通过在标准值比较模式和相对值比较模式下,根据偏移量计算纠偏调节量,在纠偏过程中根据计算得到的纠偏调节量进行纠偏,能够提高纠偏控制的精准性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!