一种道路施工起吊机及方法与流程
本发明涉及起重机,具体的说是一种道路施工起吊机及方法。
背景技术:
1、起重机械,是指用于垂直升降或者垂直升降并水平移动重物的机电设备,起重作业是将机械设备或其他物件从一个地方运送到另一个地方的一种工业过程。多数起重机械在吊具取料之后即开始垂直或垂直兼有水平的工作行程,到达目的地后卸载,再空行程到取料地点,完成一个工作循环,然后再进行第二次吊运。一般来说,起重机械工作时,取料、运移和卸载是依次进行的,各相应机构的工作是间歇性的。
2、常见的起吊机结构较大,运输移动较为困难,并且占地面积较大,在道路施工过程中经常出现起吊设备占用道路空间,造成交通拥堵,可折叠的起吊机又使用效果较为单一,不适合市场大面积推广,并且大多起吊机采用单悬臂结构设计,由于起重重量超标容易导致倾倒情况,造成施工人员损伤风险。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种道路施工起吊机及方法,以解决上述背景技术中提出的问题。
2、本发明的目的可以通过以下技术方案实现:
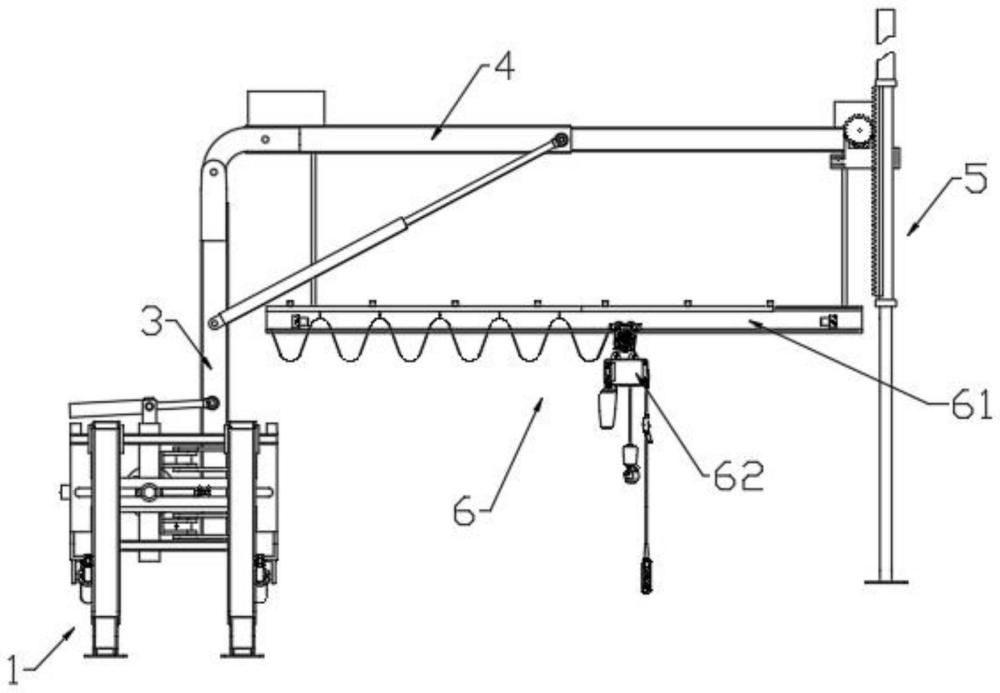
3、一种道路施工起吊机,起吊机可折叠收纳,起吊机包括底座模块,所述底座模块包括对称的两组可调节底座组件和连接架,连接架前端设有可转动调节的立臂,立臂上端设有转动连接的横向支撑臂,横向支撑臂前端设有固定连接的辅助臂模块,横向支撑臂下方设有可升降调节高度的吊装模块;
4、所述可调节底座组件包括活动架,活动架一侧设有可滑动的第一安装架,活动架另一侧滑动设有角度可调节的纵向支撑臂,连接架与第一安装架固定连接,连接架内部设有可纵向转动的旋转平台,旋转平台与立臂横向转动连接;
5、所述横向支撑臂内部设有滑动配合的第二升降柱,横向支撑臂上方设有固定连接的第一钢丝收线机,第二升降柱前端设有固定连接的第二钢丝收线机,第一钢丝收线机、第二钢丝收线机拉动吊装模块进行高度调节,辅助臂模块包括固定架,固定架与第二升降柱前端固定连接,固定架内设有可滑动升降的辅助臂,辅助臂内设有滑动连接的第三升降柱。
6、优选地,所述活动架一侧还设有固定连接的第一齿条,活动架上下两端均设有第一滑槽,活动架中心处设有贯穿的贯穿槽,活动架另一侧上还设有第二滑槽和第三滑槽。
7、优选地,所述第一安装架一侧的侧臂上设有对称分布的滚轮,滚轮卡在第一滑槽内并与其滑动配合,第一安装架一侧中心处还设有转动连接的驱动杆,驱动杆穿过贯穿槽,驱动杆上设有固定连接的第一齿轮,第一齿轮与第一齿条啮合,驱动杆远离第一安装架的一端设有固定连接的套筒。
8、优选地,所述纵向支撑臂内部设有滑动配合的第一升降柱,第一升降柱下端设有转动连接的第一底座,纵向支撑臂上端设有转动连接的第一安装块,第一安装块与第二滑槽滑动配合,纵向支撑臂侧面设有第二安装块,第二安装块与第三滑槽滑动配合,第二安装块下方设有转动连接的第二推动杆,第二推动杆伸缩端与纵向支撑臂侧面转动连接。
9、优选地,所述连接架上端设有转动连接的第三推动杆,第三推动杆伸缩端与立臂侧面转动连接,旋转平台侧面设有转动连接的第四推动杆,旋转平台前端设有固定连接的第二安装架,第二安装架上固定设有阵列分布的第五安装块。
10、优选地,所述立臂上端设有固定连接的第六安装块,立臂两侧均设有第五推动杆,第五推动杆尾端与立臂转动连接,第五推动杆伸缩端与横向支撑臂转动连接,立臂下端设有固定连接的第七安装块和第八安装块,第七安装块与第五安装块转动连接,第四推动杆伸缩端与第八安装块转动连接。
11、优选地,所述第一钢丝收线机、第二钢丝收线机内的钢丝穿过横向支撑臂、第二升降柱进行延伸下降。
12、优选地,所述吊装模块包括导向梁,钢丝下端与导向梁固定连接,导向梁上设有可移动调节位置的电动葫芦。
13、优选地,所述固定架上端面设有固定连接的电机,电机转轴上设有固定连接的第二齿轮,辅助臂上设有阵列分布的定位孔,辅助臂侧面设有固定连接的第二齿条,第二齿轮与第二齿条啮合,辅助臂移动到指定高度后,固定架内的第八推动杆推动定位销插入定位孔内,从而将辅助臂位置固定,第三升降柱下端设有转动连接的第二底座。
14、一种道路施工起吊机使用方法,所述使用方法包括以下步骤:
15、起吊机折叠状态下时连接架退至活动架最后端,将起吊机运输至使用地点,根据安装位置的情况选择纵向支撑臂的数量、间距然后进行位置固定,第二推动杆调节纵向支撑臂的角度后,纵向支撑臂推动第一升降柱调节第一升降柱与纵向支撑臂的相对长度,第一底座与地面接触后继续前进,将整个起重机从运输设备上顶起,运输设备驶出;
16、然后根据地形进行操作选择,当仅有底座模块单一支撑点时,第五推动杆推动横向支撑臂转动伸出,到达使用角度后停止,根据所需调节第二升降柱与横向支撑臂的相对长度,然后通过第一钢丝收线机、第二钢丝收线机带动钢丝进行升降,在钢丝下端安装吊钩等结构进行起吊操作,此时连接架不移动前进,从而使纵向支撑臂可以进行支撑起吊支撑,避免连接架带动立臂、横向支撑臂、辅助臂模块同步前进至活动架前端时配重失衡造成起重机倾倒情况;
17、当在底座模块支撑点对面有第二支撑点时,第五推动杆推动横向支撑臂转动伸出,到达使用角度后停止,根据所需调节第二升降柱与横向支撑臂的相对长度,然后电机启动带动第二齿轮转动,第二齿轮带动第二齿条、辅助臂滑动调节位置,辅助臂移动到指定高度后,固定架内的第八推动杆推动定位销插入定位孔内,从而将辅助臂位置固定,第三升降柱伸长调节第三升降柱与辅助臂的相对长度,第二底座接触地面后停止,然后在钢丝下端连接吊装模块,第一钢丝收线机、第二钢丝收线机拉动吊装模块到达指定高度,然后通过吊装模块进行货物、人员起吊等操作;
18、当在底座模块支撑点斜对面有第二支撑点时,通过套筒带动驱动杆、第一齿轮转动,通过第一齿轮带动第一安装架、连接架沿着活动架前进,连接架带动立臂、横向支撑臂、辅助臂模块同步前进至活动架前端,第四推动杆拉动立臂进行角度调节,使立臂朝向第二支撑点,第五推动杆推动横向支撑臂转动伸出,到达使用角度后停止,根据所需调节第二升降柱与横向支撑臂的相对长度,然后电机启动带动第二齿轮转动,第二齿轮带动第二齿条、辅助臂滑动调节位置,辅助臂移动到指定高度后,固定架内的第八推动杆推动定位销插入定位孔内,从而将辅助臂位置固定,第三升降柱伸长调节第三升降柱与辅助臂的相对长度,第二底座接触地面后停止,然后在钢丝下端连接吊装模块,第一钢丝收线机、第二钢丝收线机拉动吊装模块到达指定高度,然后通过吊装模块进行货物、人员起吊等操作;
19、当第二支撑点倾斜角度较大时,通过套筒带动驱动杆、第一齿轮转动,通过第一齿轮带动第一安装架、连接架沿着活动架前进,连接架带动立臂、横向支撑臂、辅助臂模块同步前进至活动架前端,第四推动杆拉动立臂进行角度调节,使立臂朝向第二支撑点,第五推动杆推动横向支撑臂转动伸出,到达使用角度后停止,根据所需调节第二升降柱与横向支撑臂的相对长度,然后电机启动带动第二齿轮转动,第二齿轮带动第二齿条、辅助臂滑动调节位置,辅助臂移动到指定高度后,固定架内的第八推动杆推动定位销插入定位孔内,从而将辅助臂位置固定,第三升降柱伸长调节第三升降柱与辅助臂的相对长度,第二底座接触地面前第三推动杆拉动立臂进行角度调节,第二底座接触后停止,然后在钢丝下端连接吊装模块,第一钢丝收线机、第二钢丝收线机拉动吊装模块到达指定高度,然后通过吊装模块进行货物、人员起吊等操作;
20、起吊机使用完成后,拆除吊装模块,然后第三升降柱缩进辅助臂内,电机带动辅助臂上升归位,然后第二升降柱缩进横向支撑臂内,第五推动杆拉动横向支撑臂转动至与立臂水平,然后第三推动杆、第四推动杆拉动立臂、横向支撑臂、辅助臂模块角度归位,然后反转驱动杆使第一安装架、连接架后退至活动架最后端,然后运输设备驶入底座模块下方,第一升降柱缩回纵向支撑臂内,运输设备通过活动架顶起整个起吊机,第二推动杆拉动纵向支撑臂角度归位,最后拆除纵向支撑臂、第一安装块、第二安装块、第二推动杆,运输设备拉走起吊机。
21、本发明的有益效果:
22、本发明起吊机采用可折叠结构设计,使用时可快速展开,不使用时可折叠收纳,有效降低了存放空间,提高了运输性,根据安装位置的情况选择纵向支撑臂的数量、间距然后进行位置固定,第二推动杆调节纵向支撑臂的角度后,纵向支撑臂推动第一升降柱调节第一升降柱与纵向支撑臂的相对长度,第一底座与地面接触后继续前进,将整个起重机从运输设备上顶起,运输设备驶出,并且整体的底座模块角度、高度、前后位置可调节,能够针对不同地形和承重进行调整,适用范围广泛,而且立臂的横向角度和纵向角度也可进行调节,并且可同步带动横向支撑臂、辅助臂模块进行角度调节,辅助臂模块内部高度也可进行调节,能够适用不同高度的支撑点;
23、本发明起吊机具有多种使用模式,分为单一支撑点、双支撑点、双倾斜支撑点等情况,并且针对不同情况可以进行相对应的结构变化调整,通过套筒带动驱动杆、第一齿轮转动,通过第一齿轮带动第一安装架、连接架沿着活动架前进,连接架带动立臂、横向支撑臂、辅助臂模块同步前进至活动架前端,第四推动杆拉动立臂进行角度调节,使立臂朝向第二支撑点,当第二支撑点倾斜角度较大时,第二底座接触地面前第三推动杆拉动立臂进行角度调节,第二底座接触后停止,并且起吊机可采用直连起吊和间接起吊,钢丝下端可连接吊装模块和吊钩,第一钢丝收线机、第二钢丝收线机拉动吊装模块和吊钩到达指定高度,然后通过吊装模块进行货物、人员起吊等操作;
24、本发明起吊机在使用完成后折叠收纳方便快捷,起吊机使用完成后,拆除吊装模块,然后第三升降柱缩进辅助臂内,电机带动辅助臂上升归位,然后第二升降柱缩进横向支撑臂内,第五推动杆拉动横向支撑臂转动至与立臂水平,然后第三推动杆、第四推动杆拉动立臂、横向支撑臂、辅助臂模块角度归位,然后反转驱动杆使第一安装架、连接架后退至活动架最后端,然后运输设备驶入底座模块下方,第一升降柱缩回纵向支撑臂内,运输设备通过活动架顶起整个起吊机,第二推动杆拉动纵向支撑臂角度归位,最后拆除纵向支撑臂、第一安装块、第二安装块、第二推动杆,运输设备拉走起吊机。
- 还没有人留言评论。精彩留言会获得点赞!