一种基于3D激光扫描的骨料自动装车系统的制作方法
本发明涉及工业自动化,尤其涉及一种基于3d激光扫描的骨料自动装车系统。
背景技术:
1、近年来,智能制造已经成为中国制造业的主攻方向,使用系统集成能力、信息融合能力和持续改进能力,通过数字化、智能化来提高工厂的生产效率。
2、现有技术中大部分骨料发运流程如下:运输货车在进厂后完成皮重计量前往骨料装车口→司机将车辆行驶到对应成品料仓下→司机下车将交货单交至现场放料员手中→放料员通过交货单的信息获知车辆的预装物料等信息,并通过对讲机将司机填写的预装重量告知中控室→现场放料员指挥司机进行车辆前后左右位置调整→车辆调车到位后,放料员操作下料口控制器进行装料→装料到达一定高度时,放料员通过车辆前方的报警信号灯来和语音喊话提醒司机移动车辆→地磅检测装车至预装重量时,系统自动停止定量给料机,放料员升起散装机,完成装车自动进行重车数据保存。
3、现有技术中骨料的发运存在以下问题:每个装车口最少需要一名工作人员进行现场指挥车辆及放料,人力成本较高;且工作人员不仅要监控骨料生产,还需配合现场发运人员准确地设定装车量和启动皮带秤,工作强度较大;整体的装车流程较为复杂,装车效率较低。
技术实现思路
1、本发明的目的在于提供一种基于3d激光扫描的骨料自动装车系统,以解决上述背景技术中提出的问题。
2、本发明是通过以下技术方案实现的:
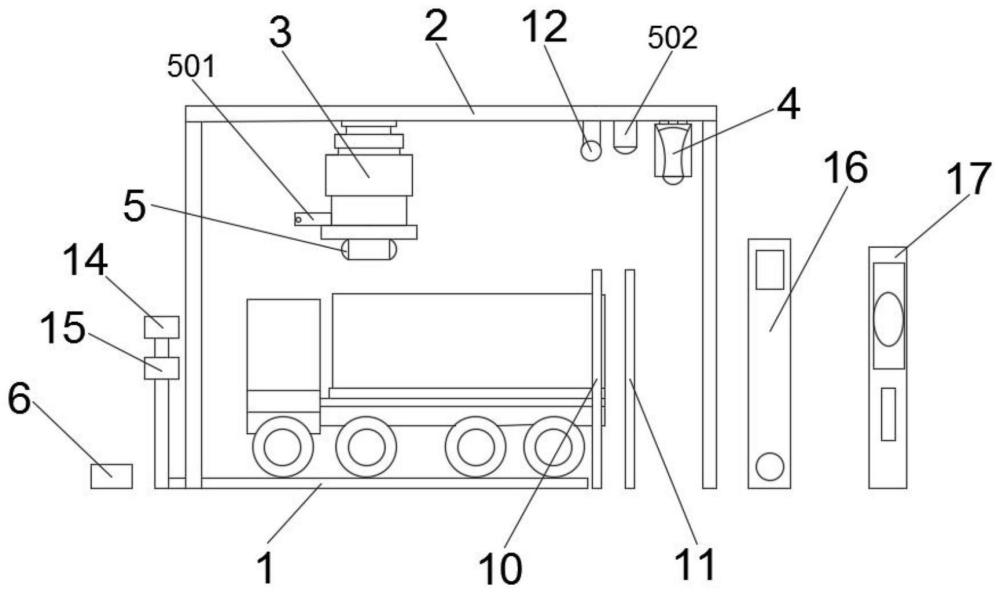
3、一种基于3d激光扫描的骨料自动装车系统,包括地磅、滑轨、下料口、激光扫描仪、传感器组件、交换机、控制器以及服务器,所述滑轨设置在所述地磅上方,所述下料口设置在所述滑轨上,所述下料口与所述滑轨滑动连接,所述下料口内设置有料位开关,所述激光扫描仪设置在所述滑轨上,所述激光扫描仪位于所述下料口侧边,所述传感器组件设置在所述下料口上,所述交换机设置在所述地磅侧边,所述激光扫描仪与所述交换机信号相连,所述交换机与所述服务器信号相连,所述滑轨、所述下料口、所述料位开关、所述传感器组件以及所述交换机均与所述控制器信号相连。
4、可选的,所述地磅侧边间隔设置第一光栅和第二光栅,所述第一光栅、所述第二光栅均与所述控制器信号相连。
5、可选的,所述传感器组件包括拉绳传感器、超声波传感器以及倾角传感器,所述拉绳传感器设置在所述下料口上,所述下料口上、所述第二光栅上均设置有所述超声波传感器,所述下料口上设置有所述倾角传感器,所述拉绳传感器、所述超声波传感器、所述倾角传感器均与所述控制器信号相连。
6、可选的,所述超声波传感器侧边设置有摄像头,所述摄像头、显示屏均与所述交换机信号相连。
7、可选的,所述地磅侧边设置有红绿灯和语音播放器,所述红绿灯位于所述语音播放器上方,所述红绿灯与所述控制器信号相连,所述语音播放器与所述交换机信号相连。
8、可选的,所述第二光栅侧边设置有道闸,所述道闸与所述控制器信号连接。
9、可选的,所述道闸侧边设置有读卡器,所述读卡器与所述交换机信号相连。
10、与现有技术相比,本发明达到的有益效果如下:
11、本发明提供的一种基于3d激光扫描的骨料自动装车系统,货车驶上地磅后,3d激光扫描仪自动对货车进行扫描,并通过交换机连接服务器,将坐标数据通过以太网传输给服务器,服务器根据数据进行货车车厢的3d建模,可以获取货车车厢的长度、宽度以及挡板高度等基础数据信息,然后控制器控制滑轨将下料口移动到货车车厢上方,传感器组件可以用于识别下料口的相对位置,接着控制器控制下料口下降,然后控制下料口开启填充骨料,当下料口填充的骨料到达指定高度时,料位开关触发,控制器关闭下料口,并控制下料口提升到指定位置,然后通过服务器对货车车厢的3d建模控制下料口移动到下一个位置,多次重复将货车填充满骨料后,控制器控制下料口关闭并回归原位,整个过程通过系统的协调配合,工作人员参与较少,人力成本较低,极大地节省了人力成本,且通过系统可以准确地完成货车车厢内骨料的填充,不需要工作人员进行对货车填充的骨料进行设定和检查,工作人员的工作强度较低,整体的骨料装车流程简单,有效地提升了骨料装车的效率。
技术特征:
1.一种基于3d激光扫描的骨料自动装车系统,其特征在于,包括地磅、滑轨、下料口、激光扫描仪、传感器组件、交换机、控制器以及服务器,所述滑轨设置在所述地磅上方,所述下料口设置在所述滑轨上,所述下料口与所述滑轨滑动连接,所述下料口内设置有料位开关,所述激光扫描仪设置在所述滑轨上,所述激光扫描仪位于所述下料口侧边,所述传感器组件设置在所述下料口上,所述交换机设置在所述地磅侧边,所述激光扫描仪与所述交换机信号相连,所述交换机与所述服务器信号相连,所述滑轨、所述下料口、所述料位开关、所述传感器组件以及所述交换机均与所述控制器信号相连。
2.根据权利要求1所述的一种基于3d激光扫描的骨料自动装车系统,其特征在于,所述地磅侧边间隔设置第一光栅和第二光栅,所述第一光栅、所述第二光栅均与所述控制器信号相连。
3.根据权利要求2所述的一种基于3d激光扫描的骨料自动装车系统,其特征在于,所述传感器组件包括拉绳传感器、超声波传感器以及倾角传感器,所述拉绳传感器设置在所述下料口上,所述下料口上、所述第二光栅上均设置有所述超声波传感器,所述下料口上设置有所述倾角传感器,所述拉绳传感器、所述超声波传感器、所述倾角传感器均与所述控制器信号相连。
4.根据权利要求3所述的一种基于3d激光扫描的骨料自动装车系统,其特征在于,所述超声波传感器侧边设置有摄像头,所述摄像头、显示屏均与所述交换机信号相连。
5.根据权利要求4所述的一种基于3d激光扫描的骨料自动装车系统,其特征在于,所述地磅侧边设置有红绿灯和语音播放器,所述红绿灯位于所述语音播放器上方,所述红绿灯与所述控制器信号相连,所述语音播放器与所述交换机信号相连。
6.根据权利要求5所述的一种基于3d激光扫描的骨料自动装车系统,其特征在于,所述第二光栅侧边设置有道闸,所述道闸与所述控制器信号连接。
7.根据权利要求6所述的一种基于3d激光扫描的骨料自动装车系统,其特征在于,所述道闸侧边设置有读卡器,所述读卡器与所述交换机信号相连。
技术总结
本发明提供一种基于3D激光扫描的骨料自动装车系统,包括地磅、滑轨、下料口、激光扫描仪、传感器组件、交换机、控制器以及服务器,所述滑轨设置在所述地磅上方,所述下料口设置在所述滑轨上,所述下料口与所述滑轨滑动连接,所述下料口内设置有料位开关,所述激光扫描仪设置在所述滑轨上,所述激光扫描仪位于所述下料口侧边,所述传感器组件设置在所述下料口上,所述交换机设置在所述地磅侧边,所述激光扫描仪与所述交换机信号相连,所述交换机与所述服务器信号相连,所述滑轨、所述下料口、所述料位开关、所述传感器组件以及所述交换机均与所述控制器信号相连。
技术研发人员:宁国云,杨升,陈敏
受保护的技术使用者:武汉中云康崇科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!