一种吸拉机器人的制作方法
本发明涉及agv机器人的,尤其涉及一种吸拉机器人。
背景技术:
1、现有技术上都是通过agv小车对货物进行输送,而对货物的拿取需要吸拉机器人进行吸附,但目前agv小车吸拉机器人是分开设置的,占用空间大,取货输送货物卸货整体衔接不够顺畅,费时导致效率较低,且成本过高。
技术实现思路
1、针对现有的吸拉机器人存在的上述问题,现旨在提供一种吸拉机器人,上下货省时,搬货效率高,布局合理,占用空间小,成本低。
2、具体技术方案如下:
3、一种吸拉机器人,包括:
4、agv小车;
5、升降输送机构,所述升降输送机构设于所述agv小车上,所述升降输送机构用于纵向和横向输送货物;
6、避让机构,所述避让机构设于所述升降输送机构上,所述避让机构用于在上货时吸取货物、在输送所述货物时与所述升降输送机构配合辅助所述货物的横向输送、以及在卸货时避让所述货物。
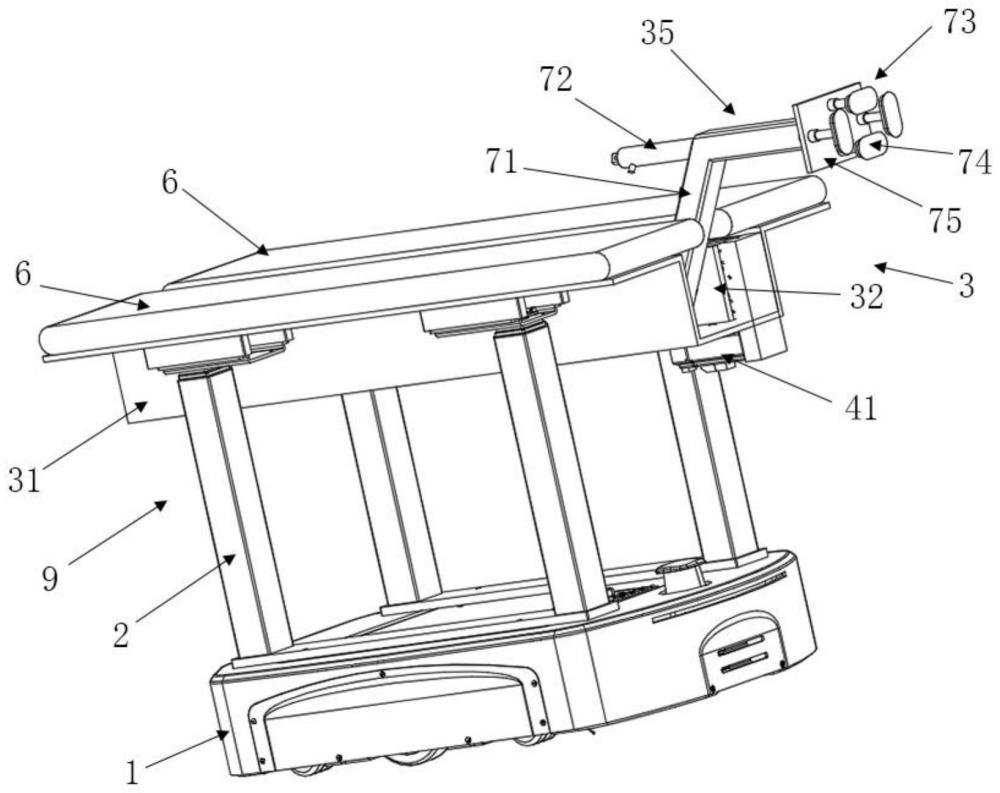
7、上述的吸拉机器人,其中,所述升降输送机构包括:至少两升降立柱、安装架和至少一输送组件,所述升降立柱设于所述agv小车上,所述安装架设于所述升降立柱上,所述输送组件设于所述安装架上,所述输送组件横向输送所述货物,所述升降立柱纵向输送所述输送组件上的所述货物。
8、上述的吸拉机器人,其中,所述避让机构包括:
9、传动组件,所述传动组件设于所述安装架上,且所述传动组件传动连接有中心轴,用以驱使所述中心轴沿水平方向活动;
10、齿条,所述齿条安装于所述安装架上;
11、齿轮,所述齿轮固定于所述中心轴上,所述齿轮与所述齿条啮合,以使所述中心轴旋转;
12、吸盘机构,所述吸盘机构安装于所述中心轴上,通过所述中心轴的旋转,以使所述吸盘机构翻转,当所述吸盘机构位于所述输送组件上方时,所述吸盘组件吸附所述货物进行上货或辅助输送,当所述吸盘机构位于所述输送组件下方时,所述吸盘组件与所述货物脱离,用于避让所述货物。
13、上述的吸拉机器人,其中,所述传动组件包括:丝杆传动模组和第一驱动件,所述第一驱动件与所述丝杆传动模组传动连接,以使所述丝杆传动模组驱动所述中心轴沿水平方向活动。
14、上述的吸拉机器人,其中,所述传动组件还包括:第一滑块,所述丝杆传动模组与所述第一滑块传动连接,所述中心轴的一端转动设于所述第一滑块上,以使所述中心轴和所述第一滑块沿水平方向活动。
15、上述的吸拉机器人,其中,所述安装架上沿其长度方向依次分为取料区、移料区和卸料区,所述齿条设于所述卸料区;
16、所述齿条沿所述中心轴的水平活动方向固定设置;
17、所述齿条的长度大于所述齿轮的周长;
18、所述安装架位于所述卸料区的端部具有缺口,所述缺口供所述吸盘机构穿过,所述齿条位于所述缺口的一侧。
19、上述的吸拉机器人,其中,所述安装架上还设有导轨,所述导轨沿所述第一滑块的活动方向设置,所述导轨上活动设于第二滑块,所述中心轴的另一端与所述第二滑块转动连接,所述第一滑块与所述第二滑块同步运动;
20、所述第二滑块的上下两侧均设有至少一个滚轮,所述滚轮分别与所述导轨的上下两侧滚动配合。
21、上述的吸拉机器人,其中,所述安装架上具有凹腔,所述凹腔的上侧和两端均呈开放设置,所述导轨、所述丝杆传动模组、所述第一滑块、所述第二滑块、所述中心轴、所述齿条均设于所述凹腔内,所述支撑杆的一端伸入所述凹腔内。
22、上述的吸拉机器人,其中,所述安装架的上表面设有两所述输送组件,所述凹腔位于两所述输送组件之间。
23、上述的吸拉机器人,其中,所述吸盘机构包括:支撑杆、第二驱动件和吸盘组件,所述支撑杆的一端安装于所述中心轴上,所述第二驱动件安装于所述支撑杆的另一端上,所述第二驱动件与所述吸盘组件传动连接;
24、所述吸盘组件包括:安装板和若干吸盘,所述第二驱动件与所述安装板传动连接,若干所述吸盘设于所述安装板上。
25、上述技术方案与现有技术相比具有的积极效果是:
26、本发明通过吸盘机构对货物进行吸附,将货物拉至输送组件上,货物通过输送组件横向输送时,吸盘机构同样横向活动对货物进行辅助输送,直至货物需要卸下之前,避让机构进行避让,吸盘机构旋转至输送组件下方,升降立柱在整个输送过程中将货物升降至能够卸货的高度,上下货省时,搬货效率高,布局合理,占用空间小,成本低。
技术特征:
1.一种吸拉机器人,其特征在于,包括:
2.根据权利要求1所述吸拉机器人,其特征在于,所述升降输送机构包括:至少两升降立柱、安装架和至少一输送组件,所述升降立柱设于所述agv小车上,所述安装架设于所述升降立柱上,所述输送组件设于所述安装架上,所述输送组件横向输送所述货物,所述升降立柱纵向输送所述输送组件上的所述货物。
3.根据权利要求2所述吸拉机器人,其特征在于,所述避让机构包括:
4.根据权利要求3所述吸拉机器人,其特征在于,所述传动组件包括:丝杆传动模组和第一驱动件,所述第一驱动件与所述丝杆传动模组传动连接,以使所述丝杆传动模组驱动所述中心轴沿水平方向活动。
5.根据权利要求4所述吸拉机器人,其特征在于,所述传动组件还包括:第一滑块,所述丝杆传动模组与所述第一滑块传动连接,所述中心轴的一端转动设于所述第一滑块上,以使所述中心轴和所述第一滑块沿水平方向活动。
6.根据权利要求5所述吸拉机器人,其特征在于,所述安装架上沿其长度方向依次分为取料区、移料区和卸料区,所述齿条设于所述卸料区;
7.根据权利要求6所述吸拉机器人,其特征在于,所述安装架上还设有导轨,所述导轨沿所述第一滑块的活动方向设置,所述导轨上活动设于第二滑块,所述中心轴的另一端与所述第二滑块转动连接,所述第一滑块与所述第二滑块同步运动;
8.根据权利要求7所述吸拉机器人,其特征在于,所述安装架上具有凹腔,所述凹腔的上侧和两端均呈开放设置,所述导轨、所述丝杆传动模组、所述第一滑块、所述第二滑块、所述中心轴、所述齿条均设于所述凹腔内,所述支撑杆的一端伸入所述凹腔内。
9.根据权利要求8所述吸拉机器人,其特征在于,所述安装架的上表面设有两所述输送组件,所述凹腔位于两所述输送组件之间。
10.根据权利要求9所述吸拉机器人,其特征在于,所述吸盘机构包括:支撑杆、第二驱动件和吸盘组件,所述支撑杆的一端安装于所述中心轴上,所述第二驱动件安装于所述支撑杆的另一端上,所述第二驱动件与所述吸盘组件传动连接;
11.根据权利要求10所述吸拉机器人,其特征在于,还包括:控制器,所述控制器安装于所述安装架上,所述控制器分别与所述第一驱动件、所述第二驱动件、所述升降立柱、所述agv小车、所述输送组件信号连接。
12.根据权利要求8所述吸拉机器人,其特征在于,所述中心轴上固定有连接块,所述支撑杆的一端套设于所述连接块上,且所述支撑杆沿所述中心轴的圆周方向与所述连接块限位配合。
技术总结
本发明公开一种吸拉机器人,包括:AGV小车;升降输送机构,所述升降输送机构设于所述AGV小车上,所述升降输送机构用于纵向和横向输送货物;避让机构,所述避让机构设于所述升降输送机构上,所述避让机构用于在上货时吸取货物、在输送所述货物时与所述升降输送机构配合辅助所述货物的横向输送、以及在卸货时避让所述货物。本发明上下货省时,搬货效率高,布局合理,占用空间小,成本低。
技术研发人员:项乐宏,刘朝宇,夏银水,蓝艇,徐晟,娄军强
受保护的技术使用者:乐仓信息科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!