自动拆垛码盘仓储物流系统的制作方法
本发明涉及物流系统,具体地,涉及一种自动拆垛码盘仓储物流系统。
背景技术:
1、随着工业化进程的不断加快,物流规模不断扩大,仓库的货物拆垛、分拣码盘和出、入库的工作越来越多,因此,需要机器人来取代人工拆垛、分拣码盘、出入库和运输等工作。
2、然而,现有技术还是主要通过人工操作叉车来完成拆垛、分拣码盘、入库和运输等作业,该方式存在劳动强度大,码垛不整齐,对拆垛货物及垛型要求高,存在货物损伤率高等缺点,且搬运的货物需要人工登记,在需要出库时,需要人工进行确认,效率低下,运输效率低,不符合智能化的发展需求。
技术实现思路
1、本发明所要解决的技术问题是提供一种自动拆垛码盘仓储物流系统,以完全取代人工操作,实现仓储物流作业(拆垛、分拣码盘、上货架、入库、下货架、出库及运输)的自动化,提高物流效率。
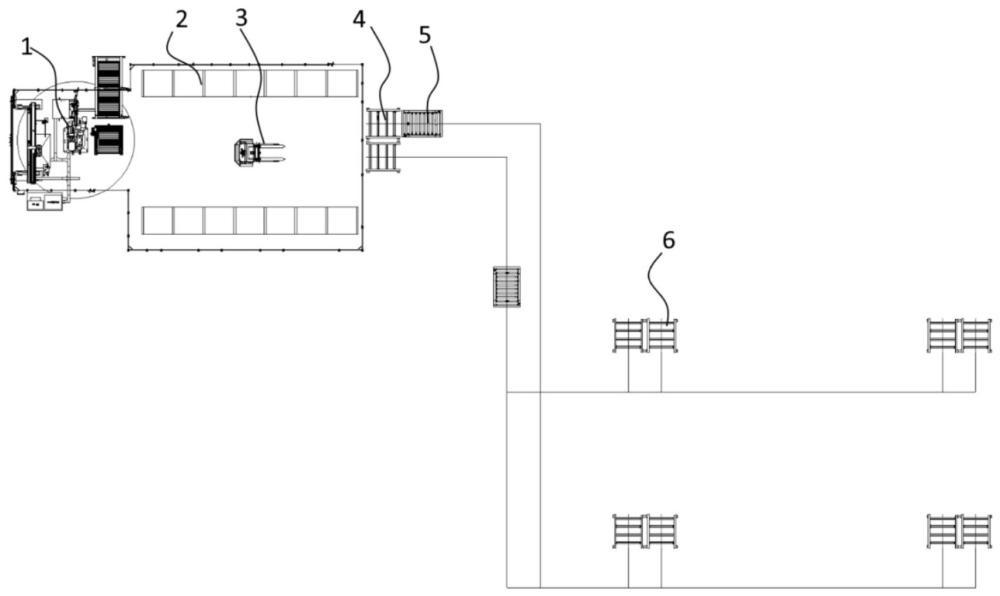
2、为了解决上述技术问题,本发明提供一种自动拆垛码盘仓储物流系统,包括:自动拆垛码盘单元,包括取料平台、拆垛机器人、用于定位待拆垛物料的物料定位装置和控制器,所述拆垛机器人和所述物料定位装置通讯连接于所述控制器,所述控制器配置为控制所述拆垛机器人根据所述物料定位装置的定位信息对待拆垛物料进行拆垛,以搬运至所述取料平台进行码盘;立体仓库,包括用于存放物料的立体货架、出库口和用于库存管理的仓库管理系统;叉车agv,所述叉车agv设置为往返于所述取料平台、所述立体货架和所述出库口之间;运输agv,所述运输agv对应所述出库口设置;其中,所述叉车agv和所述运输agv电连接于agv工控机,所述控制器、所述仓库管理系统和所述agv工控机相互通讯连接,以协调仓储物流作业。
3、作为一种具体实施方式,所述物料定位装置包括用于拍照定位待拆垛物料的3d视觉相机。
4、作为一种具体实施方式,所述3d视觉相机通过相机滑动导轨安装于桁架上。
5、作为一种具体实施方式,所述自动拆垛码盘单元还包括翻转台,所述翻转台包括定位块、翻转伸缩气缸、翻转台底座和工作台,所述工作台安装在所述翻转台底座上,所述定位块和所述翻转伸缩气缸安装在所述工作台上,所述翻转伸缩气缸布置为用于将所述工作台上的物料推至所述定位块,以对该物料定位夹持。
6、作为一种具体实施方式,所述拆垛机器人包括机器人安装座、回转底座、第一机械臂和第二机械臂,所述回转底座安装于所述机器人安装座上,所述第一机械臂的一端转动安装于所述回转底座上,所述第二机械臂与所述第一机械臂的另一端铰接,所述第二机械臂远离铰接端的一端设置有用于抓取物料的夹具。
7、作为一种具体实施方式,所述夹具为快换夹具,所述自动拆垛码盘单元还包括快换夹具库,所述快换夹具库包括用于存放若干所述快换夹具的箱体、防护罩和防护罩伸缩气缸,所述防护罩通过防护罩滑动导轨可移动安装于所述箱体上方的开放口,所述防护罩伸缩气缸设置为驱动所述防护罩移动,以打开或关闭所述开放口。
8、作为一种具体实施方式,所述夹具为电永磁铁夹具。
9、作为一种具体实施方式,所述出库口设置有出库辊筒,所述运输agv为辊筒agv。
10、作为一种具体实施方式,所述叉车agv和所述辊筒agv为激光导航agv。
11、作为一种具体实施方式,所述控制器、所述仓库管理系统和所述agv工控机相互无线通讯连接。
12、通过上述方案,本发明的有益效果如下:
13、本发明自动拆垛码盘仓储物流系统通过自动拆垛码盘单元的物料定位装置和拆垛机器人,实现物料的自动拆垛以及分拣码盘,控制器、agv工控机和仓库管理系统通讯连接,以在码盘完成之后,发送入库指令给agv工控机,同时将物料信息传给仓库管理系统,控制叉车agv将分拣码盘好的物料搬运,并能够将其运输至立体仓库进行入库,而当生产需要物料的情况下,agv工控机接收到物料出库指令,与仓库管理系统中的物料信息进行比对,控制叉车agv将对应的物料运输出库,并运输至出库口,以通过运输agv运输至指定工位上,从而实现仓储物流的自动化,完全替换人工操作,提高物流效率。
14、本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种自动拆垛码盘仓储物流系统,其特征在于,包括:
2.根据权利要求1所述的自动拆垛码盘仓储物流系统,其特征在于,所述物料定位装置包括用于拍照定位待拆垛物料的3d视觉相机(107)。
3.根据权利要求2所述的自动拆垛码盘仓储物流系统,其特征在于,所述3d视觉相机(107)通过相机滑动导轨(109)安装于桁架上。
4.根据权利要求1所述的自动拆垛码盘仓储物流系统,其特征在于,所述自动拆垛码盘单元(1)还包括翻转台(105),所述翻转台(105)包括定位块(105-1)、翻转伸缩气缸(105-2)、翻转台底座(105-3)和工作台(105-4),所述工作台(105-4)安装在所述翻转台底座(105-3)上,所述定位块(105-1)和所述翻转伸缩气缸(105-2)安装在所述工作台(105-4)上,所述翻转伸缩气缸(105-2)布置为用于将所述工作台(105-4)上的物料推至所述定位块(105-1),以对该物料定位夹持。
5.根据权利要求1所述的自动拆垛码盘仓储物流系统,其特征在于,所述拆垛机器人(103)包括机器人安装座(103-1)、回转底座(103-2)、第一机械臂(103-3)和第二机械臂(103-4),所述回转底座(103-2)安装于所述机器人安装座(103-1)上,所述第一机械臂(103-3)的一端转动安装于所述回转底座(103-2)上,所述第二机械臂(103-4)与所述第一机械臂(103-3)的另一端铰接,所述第二机械臂(103-4)远离铰接端的一端设置有用于抓取物料的夹具。
6.根据权利要求5所述的自动拆垛码盘仓储物流系统,其特征在于,所述夹具为快换夹具(108-1),所述自动拆垛码盘单元(1)还包括快换夹具库(108),所述快换夹具库(8)包括用于存放若干所述快换夹具(108-1)的箱体、防护罩(108-2)和防护罩伸缩气缸(108-3),所述防护罩(108-2)通过防护罩滑动导轨(108-4)可移动安装于所述箱体上方的开放口,所述防护罩伸缩气缸(108-3)设置为驱动所述防护罩(108-2)移动,以打开或关闭所述开放口。
7.根据权利要求5或6所述的自动拆垛码盘仓储物流系统,其特征在于,所述夹具为电永磁铁夹具。
8.根据权利要求1所述的自动拆垛码盘仓储物流系统,其特征在于,所述出库口设置有出库辊筒(4),所述运输agv为辊筒agv(5)。
9.根据权利要求8所述的自动拆垛码盘仓储物流系统,其特征在于,所述叉车agv(3)和所述辊筒agv(5)为激光导航agv。
10.根据权利要求1所述的自动拆垛码盘仓储物流系统,其特征在于,所述控制器、所述仓库管理系统和所述agv工控机相互无线通讯连接。
技术总结
本发明涉及物流系统,提供一种自动拆垛码盘仓储物流系统,包括:自动拆垛码盘单元,包括取料平台、拆垛机器人、用于定位待拆垛物料的物料定位装置和控制器,拆垛机器人和物料定位装置通讯连接于控制器,控制器配置为控制拆垛机器人根据物料定位装置的定位信息对待拆垛物料进行拆垛,以搬运至取料平台进行码盘;立体仓库,包括立体货架、出库口和仓库管理系统;叉车AGV,叉车AGV设置为往返于取料平台、立体货架和出库口之间;对应出库口设置的运输AGV;叉车AGV和运输AGV电连接于AGV工控机,控制器、仓库管理系统和AGV工控机相互通讯连接,以取代人工操作,实现拆垛、分拣码盘、上货架、入库、下货架、出库及运输的自动化,提高物流效率。
技术研发人员:刘科威,唐迁,钟学志,余东霖
受保护的技术使用者:常德中联重科液压有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!