货物管理系统的制作方法
本申请涉及自动化,尤其涉及一种货物管理系统。
背景技术:
1、随着车辆技术、机器人技术高速发展,自动导引运输车(agv,automated guidedvehicle)作为机器人的主要热点板块,越来越多的企业引入自动导引运输车对仓储物流搬运转型升级改造。自动导引运输车作为仓储物流搬运市场里面的一种智能新设备,在自动仓库与生产车间之间,各工位之间起了无可替代的重要作用。
2、在对仓库中的货物进行搬运时,通常需要对仓库中的货物数量进行人工盘点,在技术人员将盘点得到的数量输入至管理设备后,技术人员才能对货物进行管理以及选择具体货物进行搬运,耗时耗力,增加了货物管理成本。
技术实现思路
1、本申请实施例公开了一种货物管理系统,能够降低人员劳动强度,提高运输效率。
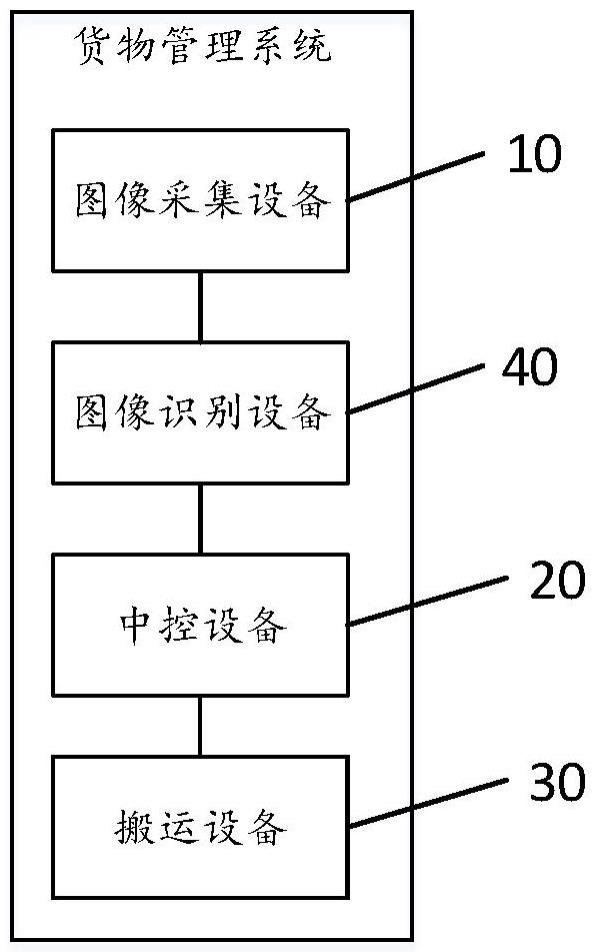
2、本申请实施例公开了一种货物管理系统,所述货物管理系统包括图像采集设备、图像识别设备、中控设备和搬运设备;所述图像采集设备,用于采集包括多个货物的货物图像;所述图像识别设备,与所述图像采集设备通信连接,用于接收所述货物图像,根据所述货物图像以及预先存储的货物边框尺寸,获得所述货物图像中的货物数量;所述中控设备,与所述图像采集设备和所述图像识别设备通信连接,用于接收所述货物图像以及所述货物图像中的货物数量,并根据所述货物图像获得每个货物的位置信息,获得搬运指令,所述搬运指令包括待搬运货物的目标位置信息,所述待搬运货物为所述多个货物中的任意一个或多个;所述搬运设备,与所述中控设备通信连接,用于接收并响应于所述搬运指令,到所述目标位置信息对应的目标位置搬运所述待搬运货物。
3、在其中一个实施例中,所述搬运设备上设置有位姿采集装置,所述搬运设备,还用于通过所述位姿采集装置识别所述待搬运货物的货物位姿。
4、在其中一个实施例中,所述搬运设备上还设置有取货装置,所述搬运设备用于根据所述货物位姿确定取货参数,并控制所述取货装置根据所述取货参数,对所述待搬运货物进行获取。
5、在其中一个实施例中,所述取货装置包括至少两个货叉,所述搬运设备通过所述至少两个货叉对所述待搬运货物进行叉取。
6、在其中一个实施例中,所述搬运设备集成有计数器,所述计数器用于根据所接受的货物数量信息对搬运的货物进行计数,以判断是否货物搬运是否结束。
7、在其中一个实施例中,所述货物管理系统还包括显示设备,所述显示设备与所述中控设备通信连接,用于显示所述货物图像中的货物数量以及每个货物的位置信息。
8、在其中一个实施例中,所述图像采集设备的数量为至少一个,每个所述图像采集设备的探测范围覆盖所述多个货物中的全部或部分货物。
9、在其中一个实施例中,所述货物管理系统还包括指令生成设备,所述指令生成设备与所述中控设备通信连接,用于生成所述搬运指令,并发送所述搬运指令至所述中控设备。
10、在其中一个实施例中,所述货物管理系统还包括数据存储设备,所述数据存储设备与所述中控设备电信连接,用于存储所述货物图像、所述货物图像中的货物数量和/或所述每个货物的位置信息。
11、在其中一个实施例中,所述中控设备包括处理器和存储器,所述存储器用于存储代码指令;所述处理器用于运行所述代码指令,以执行接收所述货物图像以及所述货物图像中的货物数量,并根据所述货物图像获得每个货物的位置信息,获得搬运指令,所述搬运指令包括待搬运货物的目标位置信息。
12、在其中一个实施例中,所述搬运设备为自动引导运输车agv叉车。
13、上述货物管理系统中,通过图像采集设备采集包括多个货物的货物图像;与图像采集设备连接的图像识别设备接收货物图像,根据货物图像以及预先存储的货物边框尺寸,获得货物图像中的货物数量;与图像采集设备和图像识别设备连接的中控设备接收货物图像以及货物图像中的货物数量,并根据货物图像获得每个货物的位置信息,获得搬运指令;与中控设备连接的搬运设备接收并响应于搬运指令,到目标位置信息对应的目标位置搬运待搬运货物。与现有技术相比,本申请可以自动对货物的数量进行盘点,从而降低人员劳动强度,提高运输效率。
技术特征:
1.一种货物管理系统,其特征在于,所述货物管理系统包括图像采集设备、图像识别设备、中控设备和搬运设备;
2.如权利要求1所述的货物管理系统,其特征在于,所述搬运设备上设置有位姿采集装置,所述搬运设备还用于通过所述位姿采集装置识别所述待搬运货物的货物位姿。
3.如权利要求2所述的货物管理系统,其特征在于,所述搬运设备上还设置有取货装置,所述搬运设备用于根据所述货物位姿确定取货参数,并控制所述取货装置根据所述取货参数,对所述待搬运货物进行获取。
4.如权利要求3所述的货物管理系统,其特征在于,所述取货装置包括至少两个货叉,所述搬运设备通过所述至少两个货叉对所述待搬运货物进行叉取。
5.如权利要求1所述的货物管理系统,其特征在于,所述搬运设备集成有计数器,所述计数器用于根据所接受的货物数量信息对搬运的货物进行计数,以判断货物搬运是否结束。
6.如权利要求1所述的货物管理系统,其特征在于,所述货物管理系统还包括显示设备,所述显示设备与所述中控设备通信连接,用于接收并显示所述货物图像中的货物数量以及每个货物的位置信息。
7.如权利要求1所述的货物管理系统,其特征在于,所述图像采集设备的数量为至少一个,每个所述图像采集设备的探测范围覆盖所述多个货物中的全部或部分货物。
8.如权利要求1所述的货物管理系统,其特征在于,所述货物管理系统还包括指令生成设备,所述指令生成设备与所述中控设备通信连接,用于生成所述搬运指令,并发送所述搬运指令至所述中控设备。
9.如权利要求1-8任一所述的货物管理系统,其特征在于,所述货物管理系统还包括数据存储设备,所述数据存储设备与所述中控设备电信连接,用于存储所述货物图像、所述货物图像中的货物数量和/或所述每个货物的位置信息。
10.如权利要求1所述的货物管理系统,其特征在于,所述搬运设备为自动引导运输车agv叉车。
技术总结
本申请实施例公开了一种货物管理系统,其中,上述货物管理系统中,通过图像采集设备采集包括多个货物的货物图像;与图像采集设备连接的图像识别设备接收货物图像,根据货物图像以及预先存储的货物边框尺寸,获得货物图像中的货物数量;与图像采集设备和图像识别设备连接的中控设备接收货物图像以及货物图像中的货物数量,并根据货物图像获得每个货物的位置信息,获得搬运指令;与中控设备连接的搬运设备接收并响应于搬运指令,到目标位置信息对应的目标位置搬运待搬运货物。与现有技术相比,本申请可以自动对货物数量进行盘点,从而降低人员劳动强度,提高运输效率。
技术研发人员:杨秉川,方牧,鲁豫杰,李陆洋,陈晓越,方晓曼
受保护的技术使用者:未来机器人(深圳)有限公司
技术研发日:20230109
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!