一种基于机器人视觉的纸张输送装置
本技术涉及纸张输送设备,特别涉及一种基于机器人视觉的纸张输送装置。
背景技术:
1、在纸张印刷的生产过程中,需要在多个设备之间进行纸张的输送,相关技术中通过摆臂机器人驱使真空吸盘进行纸张的吸取与运输,但是纸张的尺寸有多种,该机构不能自动进行动作上的调整以适应不同尺寸的纸张,而是需要人工进行调整,使得生产效率低,并且不能适应不同尺寸的纸张的生产需求,生产加工的灵活性低。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出一种基于机器人视觉的纸张输送装置,能够通过机器人视觉定位以及定位机构的辅助定位,使得吸纸机构能够自动进行动作上的调整以适应不同尺寸的纸张,从而提高生产加工的灵活性以及生产效率。
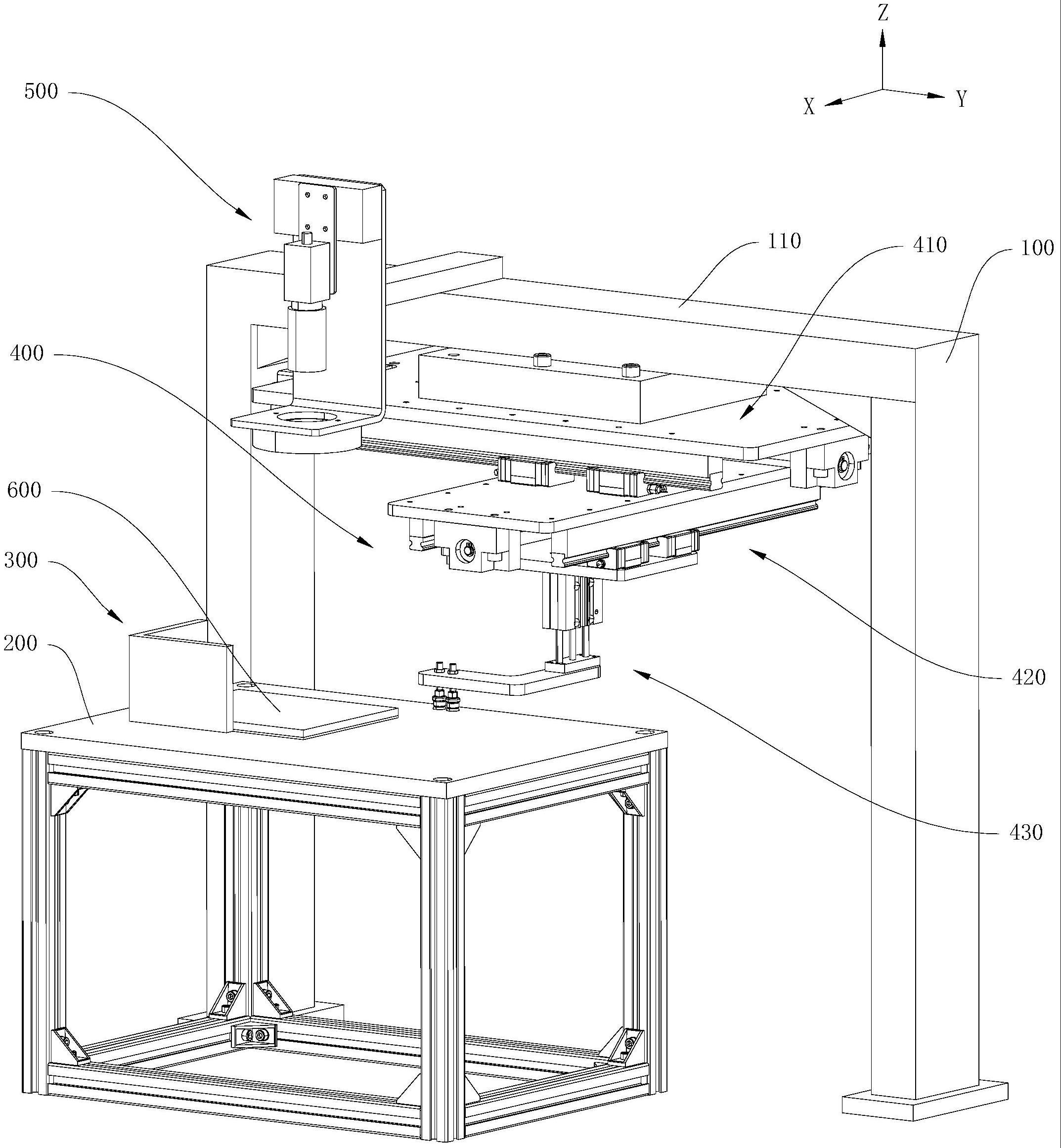
2、根据本实用新型提出的一种基于机器人视觉的纸张输送装置,包括机架、工作台、吸纸机构以及视觉模块,所述机架设置有横梁;所述工作台位于所述横梁的下方,所述工作台的上端面设置有定位机构,所述定位机构用于定位放置的纸张;所述吸纸机构连接于所述横梁,所述吸纸机构包括摆臂和伺服系统,所述摆臂设置有若干真空吸盘,所述伺服系统驱动所述摆臂移动;所述视觉模块包括工业相机、环形光源和工控机,所述工业相机连接于所述横梁,所述工业相机朝向所述工作台的一端设置有工业镜头,所述环形光源位于所述工业镜头的正下方,所述工业镜头与所述环形光源同轴心布置,所述工控机与所述伺服系统通过电性连接,并且通过以太网网络与所述工业相机连接。
3、根据本实用新型上述实施例的基于机器人视觉的纸张输送装置,至少具有如下有益效果:
4、将纸张放置到工作台时,通过定位机构进行纸张的定位,使得纸张的位置固定,通过工业相机对纸张进行图像采集并将图像信息传输到工控机,工控机进行图像的特征提取和分析并计算得到纸张的一个角点的坐标信息,然后工控机将识别到的角点坐标信息发送给伺服系统,伺服系统根据坐标信息控制摆臂从初始位置移动到该角点位置并进行纸张的吸取,从而使得吸纸机构能够自动进行动作上的调整以适应不同尺寸的纸张,从而提高生产加工的灵活性以及生产效率。
5、根据本实用新型的一些实施例,所述定位机构包括两个相互垂直的定位板,两个所述定位板用于抵接纸张相邻的两个侧边。
6、根据本实用新型的一些实施例,所述定位板和所述工作台均为黑色。
7、根据本实用新型的一些实施例,所述伺服系统包括y轴模组和x轴模组,所述y轴模组固定于所述横梁,所述y轴模组连接所述x轴模组并且能够驱动所述x轴模组沿着y轴移动,所述x轴模组连接所述摆臂并且能够驱动所述摆臂沿着x轴移动。
8、根据本实用新型的一些实施例,所述y轴模组包括第一支撑板、第一伺服电机和第一滚珠丝杠副,所述第一支撑板的上端面固接于所述横梁,所述第一支撑板的下端面固接有两个平行布置的y轴滑轨,两个所述y轴滑轨之间设置有两个第一支座,所述第一滚珠丝杠副包括第一丝杆和第一螺母,所述第一螺母套设于所述第一丝杆并且与所述第一丝杆螺纹配合连接,所述第一丝杆安装于两个所述第一支座并且与所述y轴滑轨平行,所述第一伺服电机安装于所述第一支撑板的一端,所述第一伺服电机的输出轴与所述第一丝杆通过联轴器连接。
9、根据本实用新型的一些实施例,两个所述第一支座之间设置有两个第一限位座,所述第一螺母能够抵接所述第一限位座。
10、根据本实用新型的一些实施例,所述x轴模组包括第二支撑板、第二伺服电机和第二滚珠丝杠副,所述第二支撑板的上端面固接所述第一螺母,所述第二支撑板的上端面固接有多个第一滑块,所述第一滑块滑设于所述y轴滑轨,所述第二支撑板的下端面固接有两个平行布置的x轴滑轨,两个所述x轴滑轨之间设置有两个第二支座,所述第二滚珠丝杠副包括第二丝杆和第二螺母,所述第二螺母套设于所述第二丝杆并且与所述第二丝杆螺纹配合连接,所述第二丝杆安装于两个所述第二支座并且与所述x轴滑轨平行,所述第二伺服电机安装于所述第二支撑板的一端,所述第二伺服电机的输出轴与所述第二丝杆通过联轴器连接。
11、根据本实用新型的一些实施例,两个所述第二支座之间设置有两个第二限位座,所述第二螺母能够抵接所述第二限位座。
12、根据本实用新型的一些实施例,所述摆臂包括第三支撑板、第一气缸和连接板,所述第三支撑板的上端面固接所述第二螺母,所述第三支撑板的上端面固接有多个第二滑块,所述第二滑块滑设于所述x轴滑轨,所述第一气缸固接于所述第三支撑板的下端面,所述第一气缸的活塞杆沿着z轴延伸,所述连接板为直角形,所述连接板的一端固接所述第一气缸的活塞杆的端部,另一端设置有两个所述真空吸盘,所述真空吸盘朝向所述工作台。
13、根据本实用新型的一些实施例,所述视觉模块还包括延长臂和安装支架,所述延长臂与所述横梁的方向垂直,所述延长臂的一端固接于所述横梁的上端面,另一端连接所述安装支架,所述工业相机安装于所述安装支架的顶部,所述环形光源安装于所述安装支架的底部。
14、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种基于机器人视觉的纸张输送装置,其特征在于,包括:
2.根据权利要求1所述的基于机器人视觉的纸张输送装置,其特征在于,所述定位机构包括两个相互垂直的定位板,两个所述定位板用于抵接纸张相邻的两个侧边。
3.根据权利要求2所述的基于机器人视觉的纸张输送装置,其特征在于,所述定位板和所述工作台均为黑色。
4.根据权利要求1所述的基于机器人视觉的纸张输送装置,其特征在于,所述伺服系统包括y轴模组和x轴模组,所述y轴模组固定于所述横梁,所述y轴模组连接所述x轴模组并且能够驱动所述x轴模组沿着y轴移动,所述x轴模组连接所述摆臂并且能够驱动所述摆臂沿着x轴移动。
5.根据权利要求4所述的基于机器人视觉的纸张输送装置,其特征在于,所述y轴模组包括第一支撑板、第一伺服电机和第一滚珠丝杠副,所述第一支撑板的上端面固接于所述横梁,所述第一支撑板的下端面固接有两个平行布置的y轴滑轨,两个所述y轴滑轨之间设置有两个第一支座,所述第一滚珠丝杠副包括第一丝杆和第一螺母,所述第一螺母套设于所述第一丝杆并且与所述第一丝杆螺纹配合连接,所述第一丝杆安装于两个所述第一支座并且与所述y轴滑轨平行,所述第一伺服电机安装于所述第一支撑板的一端,所述第一伺服电机的输出轴与所述第一丝杆通过联轴器连接。
6.根据权利要求5所述的基于机器人视觉的纸张输送装置,其特征在于,两个所述第一支座之间设置有两个第一限位座,所述第一螺母能够抵接所述第一限位座。
7.根据权利要求5所述的基于机器人视觉的纸张输送装置,其特征在于,所述x轴模组包括第二支撑板、第二伺服电机和第二滚珠丝杠副,所述第二支撑板的上端面固接所述第一螺母,所述第二支撑板的上端面固接有多个第一滑块,所述第一滑块滑设于所述y轴滑轨,所述第二支撑板的下端面固接有两个平行布置的x轴滑轨,两个所述x轴滑轨之间设置有两个第二支座,所述第二滚珠丝杠副包括第二丝杆和第二螺母,所述第二螺母套设于所述第二丝杆并且与所述第二丝杆螺纹配合连接,所述第二丝杆安装于两个所述第二支座并且与所述x轴滑轨平行,所述第二伺服电机安装于所述第二支撑板的一端,所述第二伺服电机的输出轴与所述第二丝杆通过联轴器连接。
8.根据权利要求7所述的基于机器人视觉的纸张输送装置,其特征在于,两个所述第二支座之间设置有两个第二限位座,所述第二螺母能够抵接所述第二限位座。
9.根据权利要求7所述的基于机器人视觉的纸张输送装置,其特征在于,所述摆臂包括第三支撑板、第一气缸和连接板,所述第三支撑板的上端面固接所述第二螺母,所述第三支撑板的上端面固接有多个第二滑块,所述第二滑块滑设于所述x轴滑轨,所述第一气缸固接于所述第三支撑板的下端面,所述第一气缸的活塞杆沿着z轴延伸,所述连接板为直角形,所述连接板的一端固接所述第一气缸的活塞杆的端部,另一端设置有两个所述真空吸盘,所述真空吸盘朝向所述工作台。
10.根据权利要求1至9中任一项所述的基于机器人视觉的纸张输送装置,其特征在于,所述视觉模块还包括延长臂和安装支架,所述延长臂与所述横梁的方向垂直,所述延长臂的一端固接于所述横梁的上端面,另一端连接所述安装支架,所述工业相机安装于所述安装支架的顶部,所述环形光源安装于所述安装支架的底部。
技术总结
本技术公开了一种基于机器人视觉的纸张输送装置,包括机架、工作台、吸纸机构和视觉模块。机架设置有横梁,工作台位于横梁的下方,工作台的上端面设置有用于定位放置的纸张的定位机构;吸纸机构包括摆臂和伺服系统,摆臂设置有若干真空吸盘,伺服系统能够驱动摆臂进行移动;视觉模块包括工业相机、环形光源和工控机,工业相机朝向工作台的一端设置有工业镜头,环形光源位于工业镜头的正下方并且二者同轴心布置;工控机与伺服系统通过电性连接,并且通过以太网网络与工业相机连接。本技术提供的基于机器人视觉的纸张输送装置能够通过机器人视觉定位以及定位机构的辅助定位,使得吸纸机构能够自动进行动作上的调整以适应不同尺寸的纸张。
技术研发人员:周鑫,杨铁牛,黄锦涛,钟景浚
受保护的技术使用者:五邑大学
技术研发日:20230112
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!