一种配送机器人的制作方法
本技术涉及机器人,具体涉及一种配送机器人。
背景技术:
1、随着科技的发展,配送机器人逐渐应用于人们的生活中,可以自行将包裹、餐品等待配送物品送到客户的面前,具有节省人力,减少人员接触等优点。
2、传统配送机器人没有配置门体,在运送时物品可能会掉落或受到人为的拿走、破坏或蚊虫的侵蚀;也有一些配送机器人设置了门体来实现封闭式配送,但存在的问题有:门体多设置为向外打开的铰接门,开关门时门体需要占用一定的空间,不适用于过道较狭窄的餐厅等场合的配送;配送机器人只设置一个门体来关闭全部置物空间,当门体打开后,所有置物空间内的物品皆可被拿走,客户有拿错物品的风险;门体需要手动打开和关闭,拿放物品不方便。
技术实现思路
1、因此,本实用新型提供了一种配送机器人,以解决门体开关时占用空间、物品易拿错和门体需手动开关的问题。
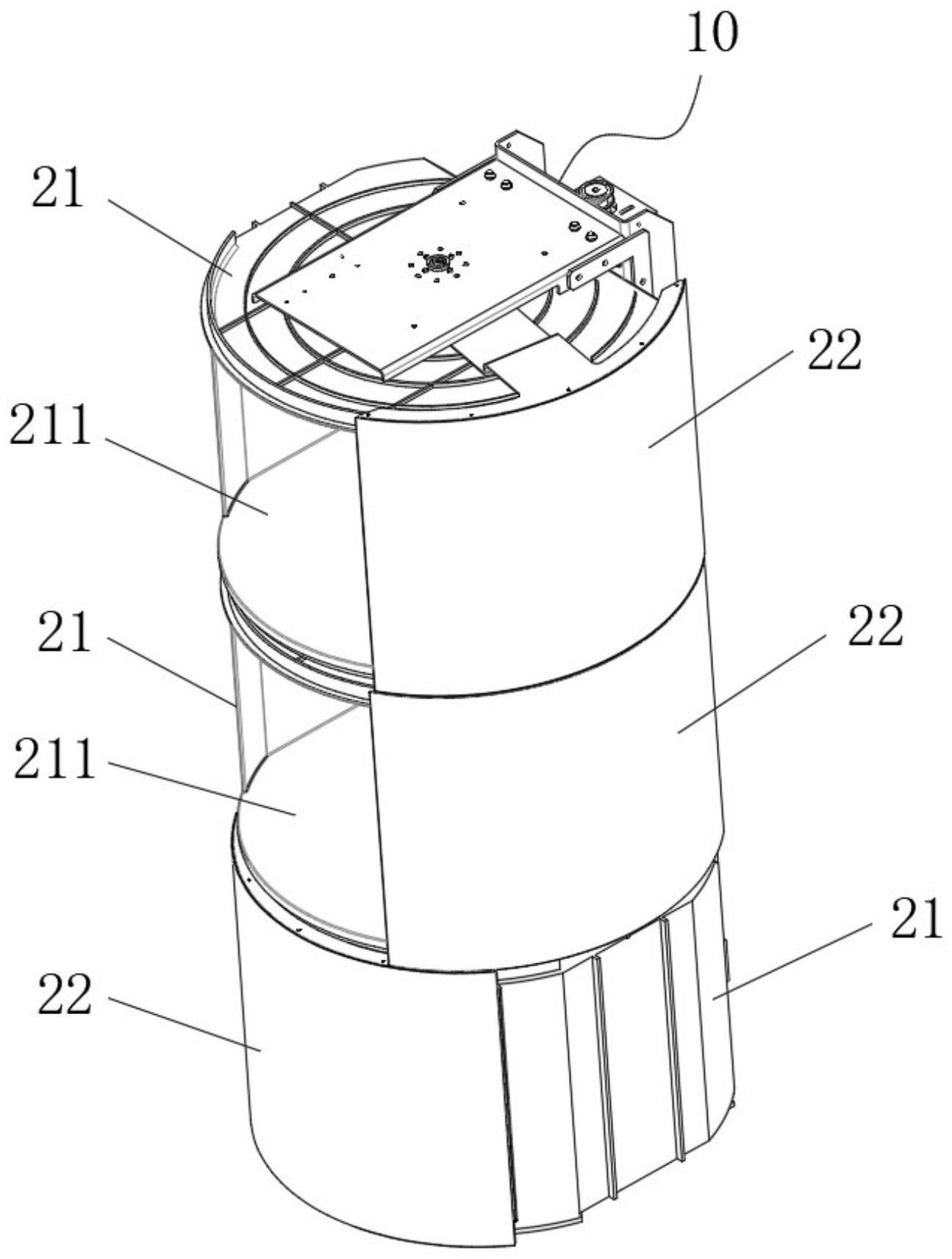
2、本实用新型技术方案如下:一种配送机器人,包括:置物箱,包括多个箱体及多个门体,多个所述箱体沿竖直方向依次设置,任一所述箱体均具有开口,所述门体呈圆弧状,多个所述门体与多个所述箱体一一对应连接;驱动机构,所述驱动机构为多个,多个所述驱动机构与多个所述门体一一对应连接;所述门体在所述驱动机构的驱动下能够围绕所述门体所在圆弧的圆心相对所述箱体旋转而具有第一极限位置及第二极限位置,在所述第一极限位置,所述门体相对所述开口错位,以使所述开口外露,在所述第二极限位置,所述门体覆盖所述开口。
3、作为本实用新型进一步的方案,所述配送机器人包括支撑架,所述支撑架包括主体及与所述主体连接且沿竖直方向依次设置的多个安装板,多个所述驱动机构一一对应安装于所述安装板;所述箱体与所述安装板及/或所述主体固定连接。
4、作为本实用新型进一步的方案,所述门体具有沿竖直方向的下端部及与所述下端部相对的上端部;所述驱动机构包括驱动件及连接板,所述连接板的一端与所述驱动件连接,另一端与所述门体的上端部或下端部固定连接。
5、作为本实用新型进一步的方案,所述支撑架还包括支撑板,所述支撑板的一端与所述安装板转动连接,另一端与所述门体固定连接;所述支撑板与所述连接板分别位于所述箱体沿竖直方向的相对两侧;所述支撑板为多个,多个所述支撑板与多个所述门体一一对应连接。
6、作为本实用新型进一步的方案,所述驱动件包括电机、主动轮、从动轮和同步带,所述电机的本体固定连接所述主体,所述电机的输出轴固定连接所述主动轮,所述从动轮转动安装在所述安装板上且固定连接所述连接板,所述同步带张紧地套设于所述主动轮和所述从动轮上。
7、作为本实用新型进一步的方案,所述配送机器人还包括有开门限位装置、关门限位装置及控制模块,所述开门限位装置在所述门体位于所述第一极限位置时产生开门感应信号并将所述开门感应信号传递给所述控制模块,所述关门限位装置在所述门体位于所述第二极限位置时产生关门感应信号并将所述关门感应信号传递给所述控制模块,所述控制模块电连接于所述驱动机构、所述开门限位装置和所述关门限位装置,所述控制模块在接收到所述开门感应信号和所述关门感应信号后控制所述驱动机构停止工作。
8、作为本实用新型进一步的方案,所述开门限位装置包括第一红外传感器和第一挡片,所述第一红外传感器固定连接所述箱体,所述第一挡片固定连接所述门体,当所述门体位于所述第一极限位置时,所述第一挡片刚好作用于所述第一红外传感器,从而使所述第一红外传感器产生开门感应信号。
9、作为本实用新型进一步的方案,所述关门限位装置包括第二红外传感器和第二挡片,所述第二红外传感器固定连接所述箱体,所述第二挡片固定连接所述门体,当所述门体位于所述第二极限位置时,所述第二挡片刚好作用于所述第二红外传感器,从而使所述第二红外传感器产生关门感应信号。
10、本实用新型技术方案,具有如下优点:由于门体呈圆弧状且围绕门体所在圆弧的圆心相对所述箱体旋转,使得门体在开合时无需占用外部空间,更多的空间能让给箱体使箱体体积能设计的更大,即配送机器人的结构更加紧凑,空间利用率更高;由于一个箱体对应有一个门体,因此可以在每次配送时只打开一个客户的物品所对应的箱体,其他箱体保持关闭,从而可避免客户拿错物品;由于设置了驱动机构,门体由驱动机构带动,从而节省了人力。
技术特征:
1.一种配送机器人,其特征在于,包括:
2.根据权利要求1所述的一种配送机器人,其特征在于,所述配送机器人包括支撑架,所述支撑架包括主体及与所述主体连接且沿竖直方向依次设置的多个安装板,多个所述驱动机构一一对应安装于所述安装板;所述箱体与所述安装板及/或所述主体固定连接。
3.根据权利要求2所述的一种配送机器人,其特征在于,所述门体具有沿竖直方向的下端部及与所述下端部相对的上端部;所述驱动机构包括驱动件及连接板,所述连接板的一端与所述驱动件连接,另一端与所述门体的上端部或下端部固定连接。
4.根据权利要求3所述的一种配送机器人,其特征在于,所述支撑架还包括支撑板,所述支撑板的一端与所述安装板转动连接,另一端与所述门体固定连接;所述支撑板与所述连接板分别位于所述箱体沿竖直方向的相对两侧;所述支撑板为多个,多个所述支撑板与多个所述门体一一对应连接。
5.根据权利要求3所述的一种配送机器人,其特征在于,所述驱动件包括电机、主动轮、从动轮和同步带,所述电机的本体固定连接所述主体,所述电机的输出轴固定连接所述主动轮,所述从动轮转动安装在所述安装板上且固定连接所述连接板,所述同步带张紧地套设于所述主动轮和所述从动轮上。
6.根据权利要求1至5任一项所述的一种配送机器人,其特征在于,还包括有开门限位装置、关门限位装置及控制模块,所述开门限位装置在所述门体位于所述第一极限位置时产生开门感应信号并将所述开门感应信号传递给所述控制模块,所述关门限位装置在所述门体位于所述第二极限位置时产生关门感应信号并将所述关门感应信号传递给所述控制模块,所述控制模块电连接于所述驱动机构、所述开门限位装置和所述关门限位装置,所述控制模块在接收到所述开门感应信号和所述关门感应信号后控制所述驱动机构停止工作。
7.根据权利要求6所述的一种配送机器人,其特征在于,所述开门限位装置包括第一红外传感器和第一挡片,所述第一红外传感器固定连接所述箱体,所述第一挡片固定连接所述门体,当所述门体位于所述第一极限位置时,所述第一挡片刚好作用于所述第一红外传感器而使所述第一红外传感器产生开门感应信号。
8.根据权利要求6所述的一种配送机器人,其特征在于,所述关门限位装置包括第二红外传感器和第二挡片,所述第二红外传感器固定连接所述箱体,所述第二挡片固定连接所述门体,当所述门体位于所述第二极限位置时,所述第二挡片刚好作用于所述第二红外传感器而使所述第二红外传感器产生关门感应信号。
技术总结
本技术提供了一种配送机器人,包括置物箱和驱动机构,置物箱包括多个沿竖直方向依次设置的带有开口的箱体和与多个所述箱体一一对应连接的多个门体,所述门体呈圆弧状,所述门体在所述驱动机构的驱动下能够围绕所述门体所在圆弧的圆心相对所述箱体旋转而具有第一极限位置及第二极限位置,在所述第一极限位置,所述门体相对所述开口错位,以使所述开口外露,在所述第二极限位置,所述门体覆盖所述开口。本技术的门体在开合时无需占用外部空间,箱体体积能设计的更大,空间利用率更高;由于一个箱体对应有一个门体,因此可以在每次配送时只打开一个客户的物品所对应的箱体,从而可避免客户拿错物品;门体由驱动机构带动,从而节省了人力。
技术研发人员:夏荣康,梁明财,梁艺耀,张文欣,潘新鹏,杨强,袁进,谢敏云
受保护的技术使用者:中铭谷智能机器人(广东)有限公司
技术研发日:20230113
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!