一种自动摆角的阀口袋开口抓手机构的制作方法
本技术涉及物料灌装自动化设备,尤其是涉及一种自动摆角的阀口袋开口抓手机构。
背景技术:
1、在物料灌装车间中,各种粉状物料都需要借助于包装机进行灌装装袋,在进行灌装操作的时候包装袋是码放在水平台板上开口,再由相应的机械抓手装置抓取,然后进行插袋工作,将阀口包装袋插装在包装机的灌装口上就可以进行灌装了,为了保证物料的流动,包装机的料嘴中心线与水平面成一定夹角,如7º、9º等,普通的抓手就是直接将袋口水平插入,影响了袋口的配合度,为了保证抓手装置插袋的准确性,如果能将抓手在插袋时也摆动同样的角度,那么插袋的准确性会更加有保证。
技术实现思路
1、本实用新型的目的就是针对上述情况,提供一种自动摆角的阀口袋开口抓手机构,该抓手机构改进简单,能够更好的保证阀口袋袋口的精准插入。
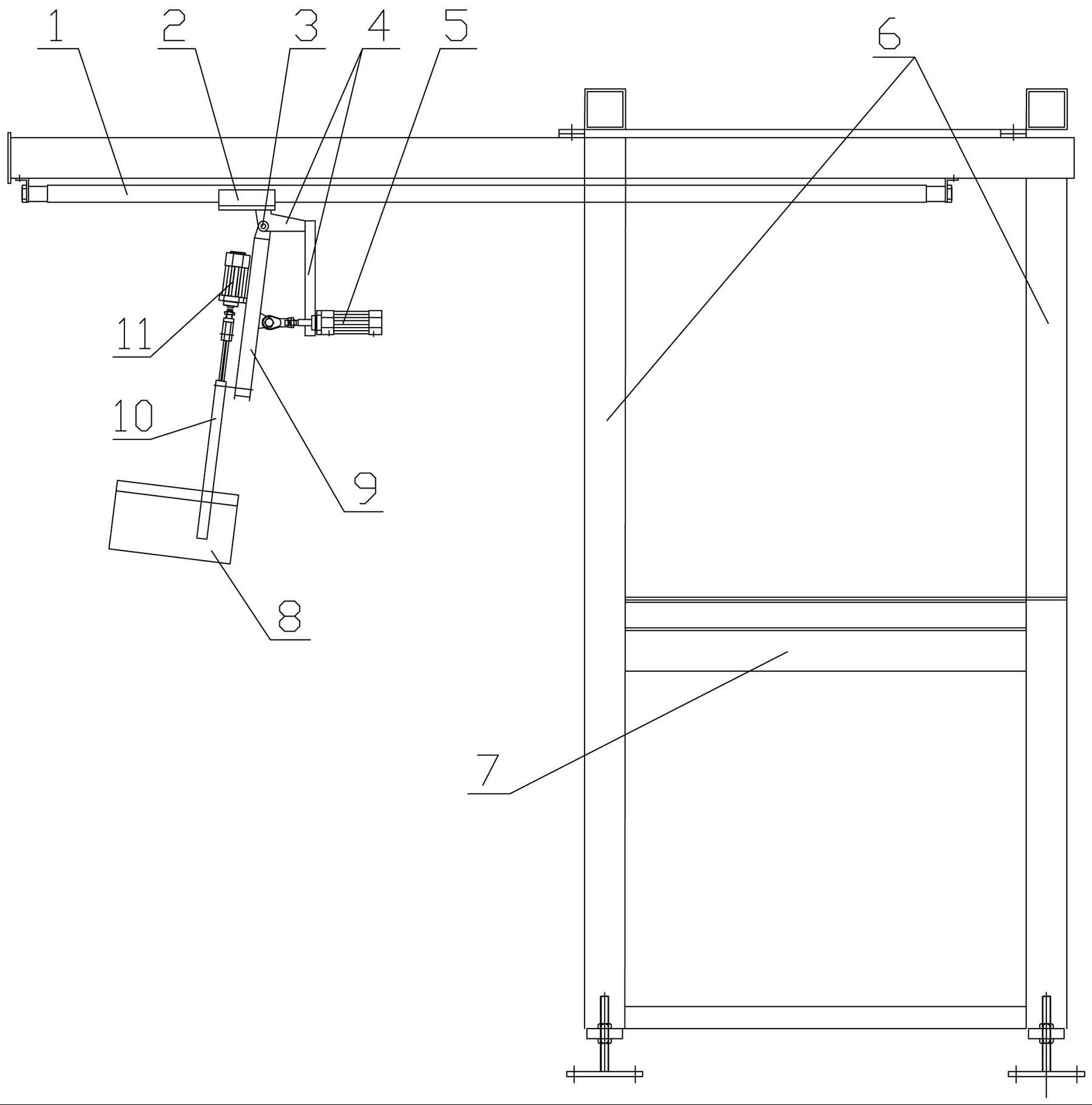
2、本实用新型的具体方案是:一种自动摆角的阀口袋开口抓手机构,具有机架,所述机架上设有用于放置阀口袋的平台,机架的侧部向上设有倒立l形支架,所述倒立l形支架上设置有横移机构,所述横移机构底部连接有安装座,安装座随着横移机构移动,所述安装座上部通过转轴转动连接有一块摆动板,该摆动板朝下安置,摆动板前侧面上设置有自动抓手装置;所述安装座底部固定装有一摆动气缸,所述摆动气缸的活塞杆连接至摆动板的背面并与之铰接连接。
3、进一步的,本实用新型中所述安装座为倒l形状,所述摆动板通过转轴安置在倒l形状的上端部,摆动气缸固定安置在倒l形状的下端部。
4、进一步的,本实用新型中所述自动抓手装置包括有夹爪气缸,夹爪气缸的伸缩杆朝下设置,夹爪气缸安置在所述摆动板上,所述摆动板的下部还设有由左剪刀杆和右剪刀杆组成的剪刀叉机构,该剪刀叉机构的上端通过夹爪气缸的伸缩杆进行连接驱动,所述左剪刀杆和右剪刀杆的下端分别设有左阀口袋袋口夹板和右阀口袋袋口夹板,左阀口袋袋口夹板和右阀口袋袋口夹板左右相对布置,左阀口袋袋口夹板和右阀口袋袋口夹板的上部均设置有折弯夹板头,两边的折弯夹板头一起对阀口袋的袋口进行定型夹持,左阀口袋袋口夹板和右阀口袋袋口夹板的下部均设置有阀口袋袋身夹盘,两边的阀口袋袋身夹盘一起配合将阀口袋袋身夹紧。
5、进一步的,本实用新型中所述左剪刀杆和右剪刀杆各自均具有连杆和剪叉杆,所述剪叉杆为折弯杆,两边的剪叉杆靠上部位交叉布置并通过销轴连在一起,每根剪叉杆的上端与对应的连杆下端铰接,两根连杆的上端同轴铰装在所述夹爪气缸的伸缩杆下端。
6、进一步的,本实用新型中所述横移机构为横向推进气缸或者是横向设置的丝杆机构,横向推进气缸的活塞杆或丝杆机构中的丝杆上传动连接有移动块,所述安装座固结安置在移动块的底部。
7、进一步的,本实用新型中所述摆动气缸整体横向安置。
8、本实用新型通过在现有的阀口袋机械抓手的基础上加设了摆动气缸,通过摆动气缸来驱动摆动板摆动一定的角度,这个摆动角度是用来配合插袋口处的角度来设置的,从而保证了抓手装置插袋的准确性,自动抓手装置在插袋时也摆动与插袋口倾斜角同样的角度,这样插袋的准确性会更加有保证,实用性也更强。
技术特征:
1.一种自动摆角的阀口袋开口抓手机构,具有机架,所述机架上设有用于放置阀口袋的平台,机架的侧部向上设有倒立l形支架,所述倒立l形支架上设置有横移机构,其特征在于:所述横移机构底部连接有安装座,安装座随着横移机构移动,所述安装座上部通过转轴转动连接有一块摆动板,该摆动板朝下安置,摆动板前侧面上设置有自动抓手装置;所述安装座底部固定装有一摆动气缸,所述摆动气缸的活塞杆连接至摆动板的背面并与之铰接连接。
2.根据权利要求1所述的一种自动摆角的阀口袋开口抓手机构,其特征在于:所述安装座为倒l形状,所述摆动板通过转轴安置在倒l形状的上端部,摆动气缸固定安置在倒l形状的下端部。
3.根据权利要求1所述的一种自动摆角的阀口袋开口抓手机构,其特征在于:所述自动抓手装置包括有夹爪气缸,夹爪气缸的伸缩杆朝下设置,夹爪气缸安置在所述摆动板上,所述摆动板的下部还设有由左剪刀杆和右剪刀杆组成的剪刀叉机构,该剪刀叉机构的上端通过夹爪气缸的伸缩杆进行连接驱动,所述左剪刀杆和右剪刀杆的下端分别设有左阀口袋袋口夹板和右阀口袋袋口夹板,左阀口袋袋口夹板和右阀口袋袋口夹板左右相对布置,左阀口袋袋口夹板和右阀口袋袋口夹板的上部均设置有折弯夹板头,两边的折弯夹板头一起对阀口袋的袋口进行定型夹持,左阀口袋袋口夹板和右阀口袋袋口夹板的下部均设置有阀口袋袋身夹盘,两边的阀口袋袋身夹盘一起配合将阀口袋袋身夹紧。
4.根据权利要求3所述的一种自动摆角的阀口袋开口抓手机构,其特征在于:所述左剪刀杆和右剪刀杆各自均具有连杆和剪叉杆,所述剪叉杆为折弯杆,两边的剪叉杆靠上部位交叉布置并通过销轴连在一起,每根剪叉杆的上端与对应的连杆下端铰接,两根连杆的上端同轴铰装在所述夹爪气缸的伸缩杆下端。
5.根据权利要求1所述的一种自动摆角的阀口袋开口抓手机构,其特征在于:所述横移机构为横向推进气缸或者是横向设置的丝杆机构,横向推进气缸的活塞杆或丝杆机构中的丝杆上传动连接有移动块,所述安装座固结安置在移动块的底部。
6.根据权利要求1所述的一种自动摆角的阀口袋开口抓手机构,其特征在于:所述摆动气缸整体横向安置。
技术总结
本技术涉及一种自动摆角的阀口袋开口抓手机构,具有机架,所述机架上设有用于放置阀口袋的平台,机架的侧部向上设有倒立L形支架,所述倒立L形支架上设置有横移机构,横移机构底部连接有安装座,安装座随着横移机构移动,所述安装座上部通过转轴转动连接有一块摆动板,该摆动板朝下安置,摆动板前侧面上设置有自动抓手装置;所述安装座底部固定装有一摆动气缸,所述摆动气缸的活塞杆连接至摆动板的背面并与之铰接连接;本技术通过在现有的阀口袋机械抓手的基础上加设了摆动气缸,通过摆动气缸来驱动摆动板摆动一定的角度,这个摆动角度是用来配合插袋口处的角度来设置的,从而保证了抓手装置插袋的准确性。
技术研发人员:陈奥,董仲平,石卿,黄凯玲
受保护的技术使用者:湖北哈佛水泥机械有限公司
技术研发日:20230207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!