一种自动抓取传递装置的制作方法
本技术涉及自动化搬运,特别涉及一种自动抓取传递装置。
背景技术:
1、通常,在自动化生产过程中,工件在不同加工设备之间需要进行上下料或换料,然而目前上下料或换料大多通过人手完成,效率低下且具有一定的危险性。比如,在鞋类生产过程中,鞋面与鞋底的结合需要进行压底工艺,目前的压底工艺通过压底机完成,并且需要人工进行上下料,用工成本高;同时对于不同尺码的鞋子需要工人判断,设备难以立即适配,适应性不佳且生产效率难以控制。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种自动抓取传递装置,实现自动化生产,减少人员依赖并提升效率。
2、根据本实用新型的实施例,提供一种自动抓取传递装置,包括:
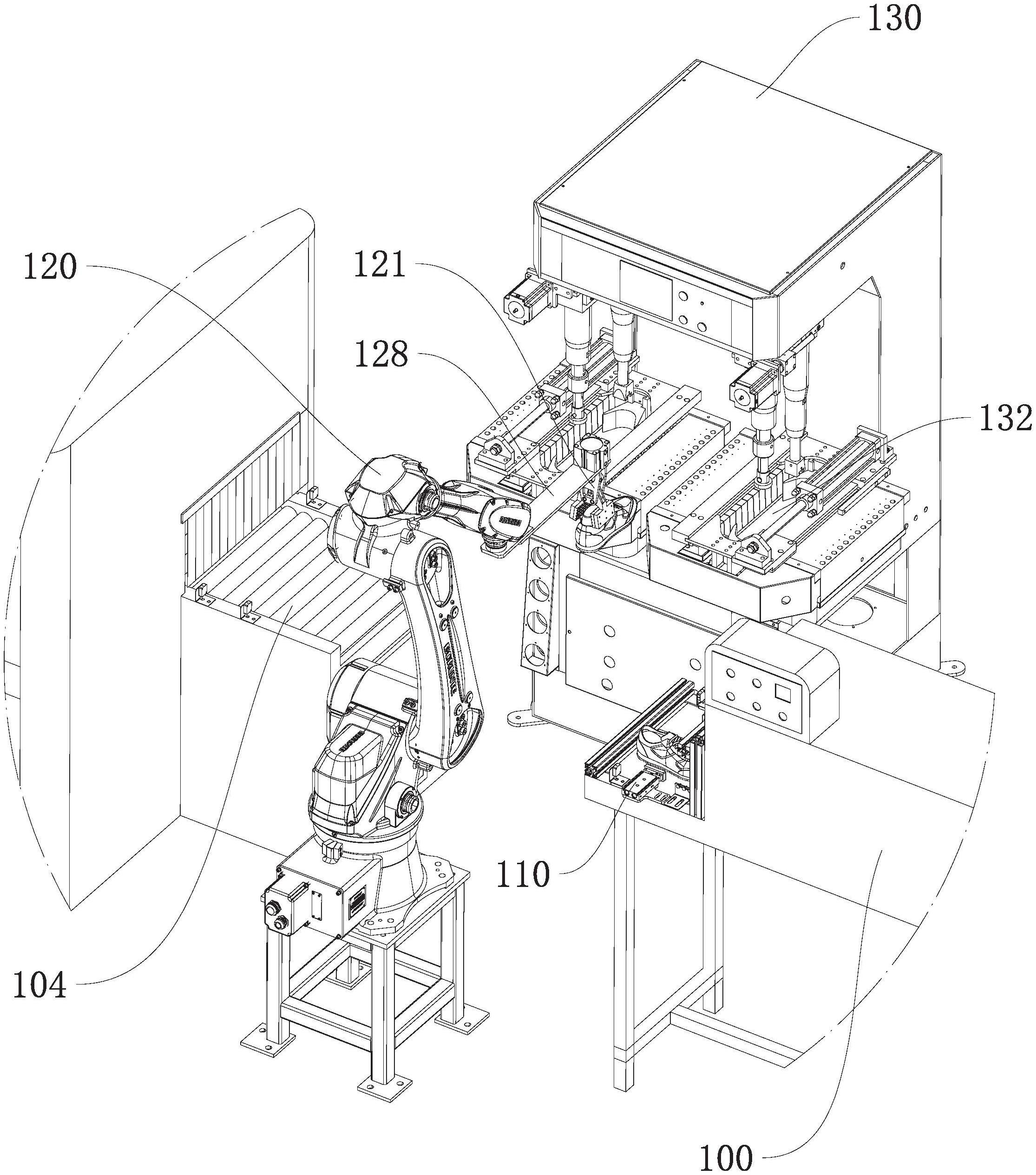
3、搬运机器人及围绕其设置的送料机构、压底机和下料输送线,搬运机器人设有夹紧机构,夹紧机构包括至少两个可开合活动的用于夹持工件的夹爪,工件内设有固定安装的连接件,夹爪通过夹持连接件实现搬运工件;送料机构设有用于定位工件的检测装置,检测装置包括相对而设的阻挡块和尺寸传感器,工件的端部抵接于阻挡块的侧面,沿着送料机构的长度方向布置有若干个尺寸传感器以检测工件的长度;压底机设有压触工件的压接臂,压接臂设有活动连接于压底机顶部的旋转部,压底机顶部设有与压接臂连接的摆动气缸,摆动气缸推动压接臂的一端可使压接臂绕旋转部产生摆动。
4、本实用新型所述的一种自动抓取传递装置至少具有以下有益效果:本实施例设置有搬运机器人及围绕其设置的送料机构、压底机和下料输送线,圆周设置的设备有助于优化空间布局,减少面积占用。搬运机器人设有夹紧机构,夹紧机构包括至少两个可开合活动的夹爪,工件内设有固定安装的连接件,夹爪通过夹持连接件实现搬运工件,无需修改夹爪便能灵活适配不同长度尺寸的工件,并且自动的工件上下料有助于提高效率,降低人力成本;送料机构设有用于定位工件的检测装置,检测装置包括相对而设的阻挡块和尺寸传感器,工件的端部抵接于阻挡块的侧面,沿着送料机构的长度方向布置有若干个尺寸传感器以检测工件的长度,可自动适配一定尺寸范围的工件,提高生产效率;压底机设有压触工件的压接臂,压接臂设有活动连接于压底机顶部的旋转部,压底机顶部设有与压接臂连接的摆动气缸,摆动气缸推动压接臂的一端可使压接臂绕旋转部产生摆动,压接臂摆动后可避让上料的夹紧机构,避免上料时产生干涉。
5、根据本实用新型所述的一种自动抓取传递装置,夹紧机构上设有驱动夹爪运动的驱动块和固定架,驱动块设有导向槽,夹爪的一端滑动连接于导向槽中,夹爪的中部旋转连接于固定架上。
6、根据本实用新型所述的一种自动抓取传递装置,检测装置设有基准块和夹紧缸,基准块和夹紧缸沿送料机构的宽度方向布置,工件位于基准块和夹紧缸之间。
7、根据本实用新型所述的一种自动抓取传递装置,压底机顶部设有安装板,安装板设有与旋转部铰接的固定件,摆动气缸固定于安装板顶部。
8、根据本实用新型所述的一种自动抓取传递装置,驱动块的中部设有引导槽,固定架上设有穿设于引导槽的导向柱,驱动块与导向柱滑动连接。
9、根据本实用新型所述的一种自动抓取传递装置,压接臂的下方设有用于夹持工件的夹紧仓,夹紧仓包括端部夹紧块和侧向夹紧块,实现固定工件。
10、根据本实用新型所述的一种自动抓取传递装置,压接臂下方设有升降台,夹紧仓位于升降台上,升降台升降使工件压触于压接臂。
11、根据本实用新型所述的一种自动抓取传递装置,下料输送线设有至少两组的到位传感器,到位传感器用于检测工件的位置。
12、根据本实用新型所述的一种自动抓取传递装置,根据本实用新型所述的一种自动抓取传递装置,夹紧机构还设有延长板,延长板的两端分别连接夹紧机构和搬运机器人。
13、根据本实用新型所述的一种自动抓取传递装置,基准块位于检测装置的中部并使检测装置的宽度分成两个区域,检测装置一次定位至少两个工件。
14、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种自动抓取传递装置,其特征在于,包括:
2.根据权利要求1所述的一种自动抓取传递装置,其特征在于:所述夹紧机构上设有驱动所述夹爪运动的驱动块和固定架,所述驱动块设有导向槽,所述夹爪的一端滑动连接于所述导向槽中,所述夹爪的中部旋转连接于所述固定架上。
3.根据权利要求1所述的一种自动抓取传递装置,其特征在于:所述检测装置设有基准块和夹紧缸,所述基准块和所述夹紧缸沿所述送料机构的宽度方向布置,所述工件位于所述基准块和所述夹紧缸之间。
4.根据权利要求1所述的一种自动抓取传递装置,其特征在于:所述压底机顶部设有安装板,所述安装板设有与所述旋转部铰接的固定件,所述摆动气缸固定于所述安装板顶部。
5.根据权利要求2所述的一种自动抓取传递装置,其特征在于:所述驱动块的中部设有引导槽,所述固定架上设有穿设于所述引导槽的导向柱,所述驱动块与所述导向柱滑动连接。
6.根据权利要求1所述的一种自动抓取传递装置,其特征在于:所述压接臂的下方设有用于夹持工件的夹紧仓,所述夹紧仓包括端部夹紧块和侧向夹紧块,实现固定所述工件。
7.根据权利要求6所述的一种自动抓取传递装置,其特征在于:所述压接臂下方设有升降台,所述夹紧仓位于所述升降台上,所述升降台升降使所述工件压触于所述压接臂。
8.根据权利要求1所述的一种自动抓取传递装置,其特征在于:所述下料输送线设有至少两组的到位传感器,所述到位传感器用于检测所述工件的位置。
9.根据权利要求1所述的一种自动抓取传递装置,其特征在于:所述夹紧机构还设有延长板,所述延长板的两端分别连接夹紧机构和搬运机器人。
10.根据权利要求3所述的一种自动抓取传递装置,其特征在于:所述基准块位于所述检测装置的中部并使所述检测装置的宽度分成两个区域,所述检测装置一次定位至少两个所述工件。
技术总结
本技术公开了一种自动抓取传递装置,涉及自动化搬运技术领域,包括搬运机器人及围绕其设置的送料机构、压底机和下料输送线,圆周设置的设备有助于减少面积占用。搬运机器人设有夹紧机构,夹紧机构包括至少两个可开合活动的夹爪,工件内设有固定安装的连接件,夹爪通过夹持连接件实现搬运工件,能灵活适配不同尺寸的工件,利于提高效率并降低人力成本;送料机构设有用于定位工件的检测装置,包括阻挡块和尺寸传感器,沿着送料机构的长度方向布置若干个尺寸传感器,可自动适配一定尺寸范围的工件;压底机设有压接臂,压接臂设有旋转部,压底机顶部设有与压接臂连接的摆动气缸,压接臂摆动后可避让上料的夹紧机构,避免上料时产生干涉。
技术研发人员:李长虹
受保护的技术使用者:佛山市全益鞋机有限公司
技术研发日:20230119
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!