多平台式协作工作台的制作方法
本技术涉及协作工作台,具体涉及多平台式协作工作台。
背景技术:
1、为了实现自动化生产的高效上料及下料,进而研发出了一种双滑台上下料装置(如中国专利公开的公开号为cn106629004a的双滑台穿梭机构),并与自动化加工设备上的上下料机械手进行配合以实现自动化高效上下料,然而现有技术中的工件自动化加工设备的不断更新,其加工速度也得到了进一步的提升,因而双滑台上下料装置已不能满足现代化快速加工设备的加工要求,所以急需改进。
技术实现思路
1、为解决上述至少一个技术缺陷,本实用新型提供了如下技术方案:
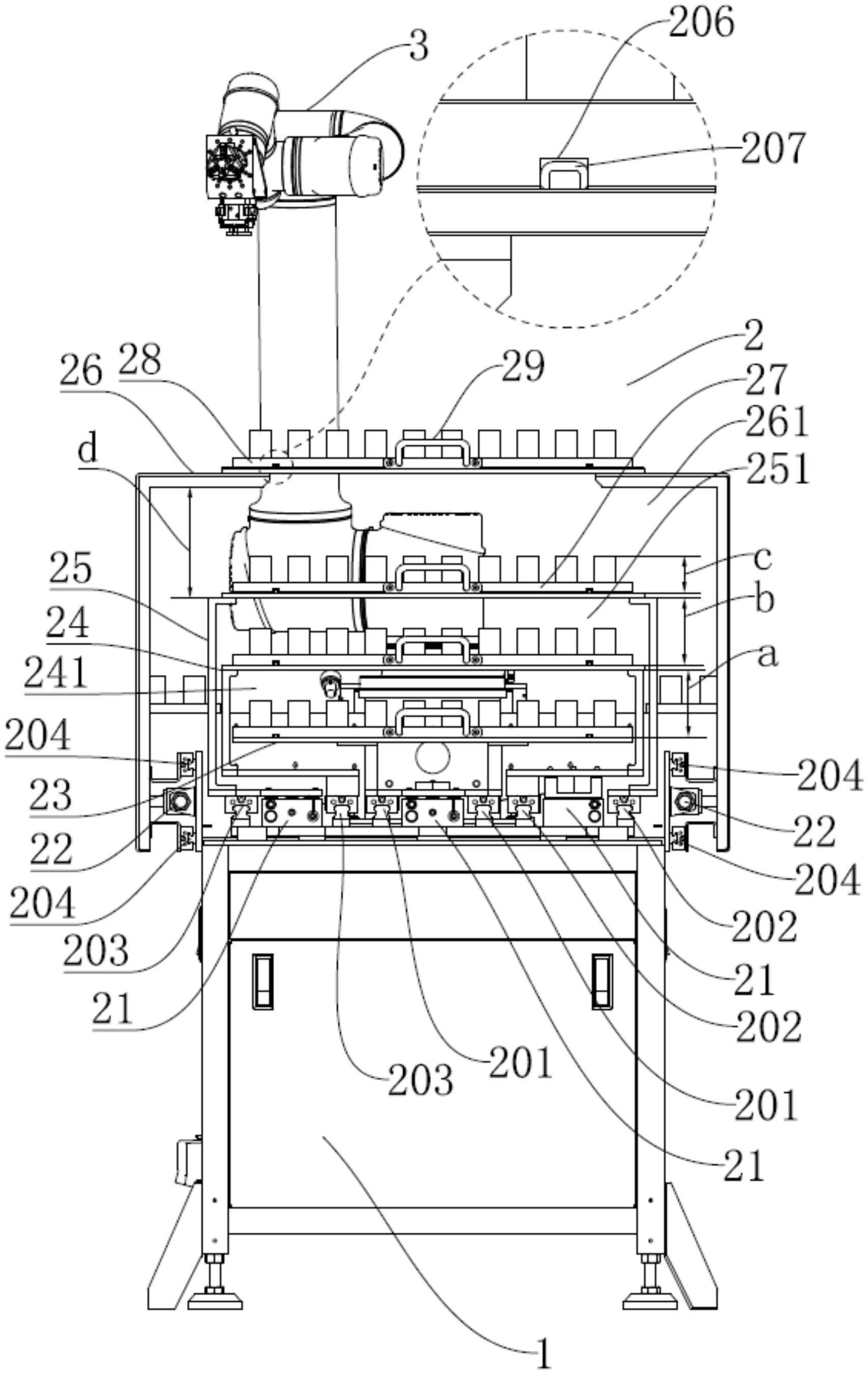
2、本申请文件设计的多平台式协作工作台,包括底座,底座上安装有多平台装置、以及用于工件取放的工件取放机构,工件取放机构位于多平台装置的旁侧,多平台装置包括三个平移驱动装置一,三个平移驱动装置一的平移驱动部分别安装有活动框架一、活动框架二和活动框架三并驱动其三者均在y轴方向往复平移,活动框架二上形成有可使活动框架一通过的穿行通道一,活动框架三上形成有可使活动框架二通过的穿行通道二,穿行通道一的侧内壁与活动框架二的侧外壁之间存有间隙,穿行通道二的侧内壁与活动框架三的侧外壁之间存有间隙;活动框架一的穿行通道一顶部内壁与活动框架二的顶部外壁之间的高度差为a,活动框架二的穿行通道二顶部内壁与活动框架三的顶部外壁之间的高度差为b;活动框架一、活动框架二和活动框架三的顶部外壁上分别定位有用于工件定位的工件定位盘一,各工件定位盘一的位置对应且长度一致,工件定位盘一底面与其工件顶面之间的距离为c,c<a和c<b。
3、根据以上所述的多平台式协作工作台,多平台装置还包括平移驱动装置二,平移驱动装置二的平移驱动部上安装有活动框架四并驱动其在y轴方向往复平移,活动框架四上形成有可使活动框架一、活动框架二和活动框架三通过的穿行通道三,穿行通道三的侧内壁与活动框架一的侧外壁之间存有间隙,活动框架四的穿行通道三顶部内壁与活动框架一的顶部外壁之间的高度差为d,活动框架四的顶部外壁上定位有用于工件定位的工件定位盘二,工件定位盘二与各工件定位盘一的位置对应且长度一致,c<d。
4、根据以上所述的多平台式协作工作台,平移驱动装置二和三个平移驱动装置一在y轴上并排设置且相互平行,安装有活动框架三的平移驱动装置一位于另外两个平移驱动装置一之间,安装有活动框架一的平移驱动装置一和安装有活动框架二的平移驱动装置一的旁侧均设置平移驱动装置二。
5、根据以上所述的多平台式协作工作台,活动框架一的下方设置有直线导轨一,直线导轨一的滑块与活动框架一的底部固定;活动框架二的下方设置有直线导轨二,直线导轨二的滑块与活动框架二的底部固定;活动框架三的下方设置有直线导轨三,直线导轨三的滑块与活动框架三的底部固定。
6、根据以上所述的多平台式协作工作台,平移驱动装置二的旁侧设置直线导轨四,直线导轨四的滑块与活动框架四的底部连接。
7、根据以上所述的多平台式协作工作台,平移驱动装置二和三个平移驱动装置一均采用无杆气缸。
8、根据以上所述的多平台式协作工作台,各工件定位盘一、工件定位盘二的底面均形成有沿y轴方向延伸的长形贯通槽一,活动框架一、活动框架二、活动框架三和活动框架四的顶部外壁形成凸起一,凸起一限位于长形贯通槽一内。
9、根据以上所述的多平台式协作工作台,底座上位于多平台装置的旁侧安装有支座,工件取放机构安装于支座上。
10、根据以上所述的多平台式协作工作台,支座的侧面一或侧面二中的至少一者安装有托板,托板上放置有工件定位盘三,工件定位盘三的底面形成有沿x轴方向延伸的长形贯通槽二,托板上形成凸起二,凸起二限位于长形贯通槽二内;支座的侧面三安装有支架,支架上可拆卸式安装有控制器。
11、根据以上所述的多平台式协作工作台,还包括推车,推车上安装有固定框架,固定框架上形成分别用于三个工件定位盘一和一个工件定位盘二定位的四个支撑台,各支撑台之间间隔设置,各支撑台之间间隔距离为e,c<e。
12、与现有技术相比,本实用新型的有益效果:
13、本实用新型的多平台式协作工作台,其利用四层相互间隔设置的工件定位盘来进行相互交替穿梭运动来进行工件的上下料供应,并且由工作台上设置的工件取放机构(3)进行上下料,从而满足现代化快速加工设备的加工速度要求,而且加工设备上也无需再设置自动化机械手。
技术特征:
1.一种多平台式协作工作台,包括底座(1),底座(1)上安装有多平台装置(2)、以及用于工件取放的工件取放机构(3),工件取放机构(3)位于多平台装置(2)的旁侧,其特征在于,多平台装置(2)包括三个平移驱动装置一(21),三个平移驱动装置一(21)的平移驱动部分别安装有活动框架一(23)、活动框架二(24)和活动框架三(25)并驱动其三者均在y轴方向往复平移,活动框架二(24)上形成有可使活动框架一(23)通过的穿行通道一(241),活动框架三(25)上形成有可使活动框架二(24)通过的穿行通道二(251),穿行通道一(241)的侧内壁与活动框架二(24)的侧外壁之间存有间隙,穿行通道二(251)的侧内壁与活动框架三(25)的侧外壁之间存有间隙;活动框架一(23)的穿行通道一(241)顶部内壁与活动框架二(24)的顶部外壁之间的高度差为a,活动框架二(24)的穿行通道二(251)顶部内壁与活动框架三(25)的顶部外壁之间的高度差为b;活动框架一(23)、活动框架二(24)和活动框架三(25)的顶部外壁上分别定位有用于工件定位的工件定位盘一(27),各工件定位盘一(27)的位置对应且长度一致,工件定位盘一(27)底面与其工件顶面之间的距离为c,c<a和c<b。
2.根据权利要求1所述的多平台式协作工作台,其特征在于,多平台装置(2)还包括平移驱动装置二(22),平移驱动装置二(22)的平移驱动部上安装有活动框架四(26)并驱动其在y轴方向往复平移,活动框架四(26)上形成有可使活动框架一(23)、活动框架二(24)和活动框架三(25)通过的穿行通道三(261),穿行通道三(261)的侧内壁与活动框架一(23)的侧外壁之间存有间隙,活动框架四(26)的穿行通道三(261)顶部内壁与活动框架一(23)的顶部外壁之间的高度差为d,活动框架四(26)的顶部外壁上定位有用于工件定位的工件定位盘二(28),工件定位盘二(28)与各工件定位盘一(27)的位置对应且长度一致,c<d。
3.根据权利要求2所述的多平台式协作工作台,其特征在于,平移驱动装置二(22)和三个平移驱动装置一(21)在y轴上并排设置且相互平行,安装有活动框架三(25)的平移驱动装置一(21)位于另外两个平移驱动装置一(21)之间,安装有活动框架一(23)的平移驱动装置一(21)和安装有活动框架二(24)的平移驱动装置一(21)的旁侧均设置平移驱动装置二(22)。
4.根据权利要求3所述的多平台式协作工作台,其特征在于,活动框架一(23)的下方设置有直线导轨一(201),直线导轨一(201)的滑块与活动框架一(23)的底部固定;活动框架二(24)的下方设置有直线导轨二(202),直线导轨二(202)的滑块与活动框架二(24)的底部固定;活动框架三(25)的下方设置有直线导轨三(203),直线导轨三(203)的滑块与活动框架三(25)的底部固定。
5.根据权利要求4所述的多平台式协作工作台,其特征在于,平移驱动装置二(22)的旁侧设置直线导轨四(204),直线导轨四(204)的滑块与活动框架四(26)的底部连接。
6.根据权利要求5所述的多平台式协作工作台,其特征在于,平移驱动装置二(22)和三个平移驱动装置一(21)均采用无杆气缸。
7.根据权利要求6所述的多平台式协作工作台,其特征在于,各工件定位盘一(27)、工件定位盘二(28)的底面均形成有沿y轴方向延伸的长形贯通槽一(206),活动框架一(23)、活动框架二(24)、活动框架三(25)和活动框架四(26)的顶部外壁形成凸起一(207),凸起一(207)限位于长形贯通槽一(206)内。
8.根据权利要求6所述的多平台式协作工作台,其特征在于,底座(1)上位于多平台装置(2)的旁侧安装有支座(4),工件取放机构(3)安装于支座(4)上。
9.根据权利要求7所述的多平台式协作工作台,其特征在于,支座(4)的侧面一或侧面二中的至少一者安装有托板(5),托板(5)上放置有工件定位盘三(6),工件定位盘三(6)的底面形成有沿x轴方向延伸的长形贯通槽二(61),托板(5)上形成凸起二(51),凸起二(51)限位于长形贯通槽二(61)内;支座(4)的侧面三安装有支架,支架上可拆卸式安装有控制器。
10.根据权利要求2-9任一项所述的多平台式协作工作台,其特征在于,还包括推车(7),推车(7)上安装有固定框架(71),固定框架(71)上形成分别用于三个工件定位盘一(27)和一个工件定位盘二(28)定位的四个支撑台(711),各支撑台(711)之间间隔设置,各支撑台(711)之间间隔距离为e,c<e。
技术总结
本技术公开了多平台式协作工作台,工件取放机构位于多平台装置的旁侧,多平台装置包括三个平移驱动装置一,三个平移驱动装置一的平移驱动部分别安装有活动框架一、活动框架二和活动框架三并驱动其三者均在Y轴方向往复平移,活动框架二上形成有可使活动框架一通过的穿行通道一,活动框架三上形成有可使活动框架二通过的穿行通道二,穿行通道一的侧内壁与活动框架二的侧外壁之间存有间隙,穿行通道二的侧内壁与活动框架三的侧外壁之间存有间隙;各活动框架三上分别定位有用于工件定位的工件定位盘一。其满足现代化快速加工设备的加工速度要求,而且加工设备上也无需再设置自动化机械手。
技术研发人员:蔡章根,瞿锦程
受保护的技术使用者:宁波贝克韦尔智能科技有限公司
技术研发日:20230206
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!