小型物流用搬运机器人的制作方法
本技术涉及物流机器人,尤其涉及小型物流用搬运机器人。
背景技术:
1、物流机器人是指应用于仓库、分拣中心、以及运输途中等场景的,进行货物转移、搬运等操作的机器人。
2、现有的物流机器人实现了智能化和普遍化,现阶段的物流机器人顶部有托盘,但托盘上面无任何的夹持装置,只是把待转运的物料放在托盘上而已,这样的话机器人在移动过程中可能会存在磕碰甚至是摔落,给物料带来损坏,同时也给物流中心带了一些不必要的损失。
技术实现思路
1、根据以上技术问题,本实用新型提供一种可以夹持物料的小型物流用搬运机器人。
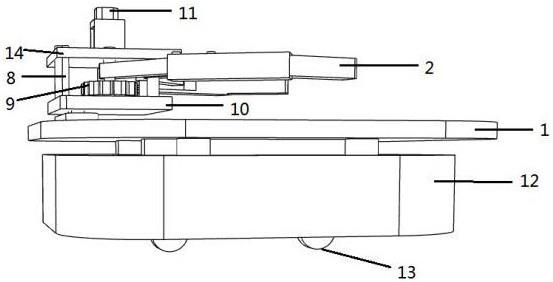
2、本实用新型提供小型物流用搬运机器人,其特征在于包括托盘、夹具、第一固定杆、第二固定杆、固定轴、转杆、齿轮a、连接杆、齿轮b、固定板a、固定板b、旋转电机、搬运机器人本体以及移动轮,所述搬运机器人本体底部和移动轮连接,所述搬运机器人本体顶部和托盘连接,所述托盘顶部一侧和固定板a连接,所述固定板a和连接杆连接,所述连接杆和固定板b连接,所述固定板b上部设置旋转电机,所述旋转电机输出端和转杆连接,所述转杆和齿轮a连接,所述齿轮a上侧和第一固定杆连接,所述齿轮a前侧设置固定轴,所述固定轴和第二固定杆转动连接,所述第一固定杆以及第二固定杆均通过转轴和夹具连接,所述齿轮a与齿轮b接触,所述齿轮b和转杆连接,所述齿轮b前侧设置固定轴,所述固定轴和第二固定杆转动连接,所述第一固定杆以及第二固定杆均通过转轴和夹具连接。
3、所述搬运机器人顶部设置固定条,所述固定条周围设置固定柱,所述固定柱内部为中空结构,所述固定柱内部设置橡胶垫。
4、本实用新型的有益效果为:本实用新型为小型物流用搬运机器人,通过设置齿轮a以及齿轮b,并且齿轮a以及齿轮b均和第一固定杆、第二固定杆相连接,第一固定杆与第二固定杆又和夹具连接,并且齿轮a通过转杆和旋转电机连接,工作时,启动旋转电机,旋转电机带动转杆,转杆带动齿轮a,齿轮a带动第一固定杆和第二固定杆,从而带动夹具向外移动,同时齿轮a带动齿轮b,齿轮b带动第一固定杆和第二固定杆,从而带动夹具向外移动,从而使得两个夹具之间的距离可调,以便对不同大小的物料进行夹持固定,从而增加物料在运输过程中的稳定性。
技术特征:
1.小型物流用搬运机器人,其特征在于包括托盘、夹具、第一固定杆、第二固定杆、固定轴、转杆、齿轮a、连接杆、齿轮b、固定板a、固定板b、旋转电机、搬运机器人本体以及移动轮,所述搬运机器人本体底部和移动轮连接,所述搬运机器人本体顶部和托盘连接,所述托盘顶部一侧和固定板a连接,所述固定板a和连接杆连接,所述连接杆和固定板b连接,所述固定板b上部设置旋转电机,所述旋转电机输出端和转杆连接,所述转杆和齿轮a连接,所述齿轮a上侧和第一固定杆连接,所述齿轮a前侧设置固定轴,所述固定轴和第二固定杆转动连接,所述第一固定杆以及第二固定杆均通过转轴和夹具连接,所述齿轮a与齿轮b接触,所述齿轮b和转杆连接,所述齿轮b前侧设置固定轴,所述固定轴和第二固定杆转动连接,所述第一固定杆以及第二固定杆均通过转轴和夹具连接。
2.根据权利要求1所述的小型物流用搬运机器人,其特征在于所述搬运机器人本体顶部设置固定条,所述固定条周围设置固定柱,所述固定柱内部为中空结构,所述固定柱内部设置橡胶垫。
技术总结
本技术提供小型物流用搬运机器人,其特征在于包括托盘、夹具、第一固定杆、第二固定杆、固定轴、转杆、齿轮A、连接杆、齿轮B、固定板、旋转电机、搬运机器人本体以及移动轮,所述搬运机器人本体底部和移动轮连接,所述所述搬运机器人顶部和托盘连接,所述托盘顶部一侧和固定板A连接,所述固定板A和连接杆连接;工作时,启动旋转电机,旋转电机带动转杆,转杆带动齿轮A,齿轮A带动第一固定杆和第二固定杆,从而带动夹具向外移动,同时齿轮A带动齿轮B,齿轮B带动第一固定杆和第二固定杆,从而带动夹具向外移动,从而使得两个夹具之间的距离可调,以便对不同大小的物料进行夹持固定,从而增加物料在运输过程中的稳定性。
技术研发人员:姚景伟,姚井超
受保护的技术使用者:唐山北启景恒科技有限公司
技术研发日:20230215
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!