伸缩臂结构的制作方法
本申请涉及机械伸缩结构的,尤其是涉及一种伸缩臂结构。
背景技术:
1、伸缩结构是一种总长可进行变化的结构,一般由多节相互套设或者滑移的伸缩节组成,在需要进行伸缩时,需要借助外力进行驱动。现有的驱动方式一般采用电机、链轮、链条进行驱动,电机、链轮、链条均安装在同一节伸缩节上,其中链条某一节与相邻的伸缩节固定,通过电机带动链轮转动,链轮带动链条运动,相邻的伸缩节与链条固定而一起运动,实现对伸缩节的驱动过程。
2、针对上述中的相关技术,发明人认为,由于链条存在张紧度的问题,且链节之间有一定间隙,在驱动时,伸长的长度不易控制,导致精确度较低,不适用于一些高精度的场景。
技术实现思路
1、为了匹配高精度的伸缩需求,本申请提供一种伸缩臂结构。
2、本申请提供的伸缩臂结构采用如下的技术方案:
3、一种伸缩臂结构,包括至少两节相互滑移配合的输送架,相邻两节所述输送架分别设置有电机和齿条,所述齿条的长度方向平行于所述输送架的滑移方向,所述电机的输出轴安装有与所述齿条啮合的齿轮。
4、通过采用上述技术方案,当需要进行伸缩时,电机带动齿轮转动,齿轮转动带动齿条运动,齿条与输送架同步运动,从而实现相邻输送架的伸缩变化,实现伸缩臂整体长度的变化。电机齿轮齿条的配合方式,传输相较于链轮链条较为精确,使得伸缩的长度容易控制,提高适用的场景。
5、可选的,在设有所述齿条的所述输送架设置有两个所述齿条,两个所述齿条分别设置在所述输送架长度方向的两侧,所述齿轮也设置有两个,两个所述齿轮安装在所述电机的输出轴,且两个所述齿条与两个所述齿轮一一对应啮合。
6、通过采用上述技术方案,两组齿轮齿条的配合,使得电机驱动时,输送架两边的受力较为平衡,在两个输送架相对滑移时,减少了滑移结构因受力不平衡而卡顿或者摩擦力增加的情况,从而提高了滑移的流程性和稳定性。
7、可选的,相邻所述输送架分别设置有滑轨和多个滑块,所述滑轨的长度方向平行于所述输送架的滑移方向,所述滑块间隔安装且所述滑轨滑移配合。
8、通过采用上述技术方案,滑轨和滑块的配合,可以在输送架相互滑移时,降低两者之间的摩擦力,提高相对运动的顺畅度,减少卡顿的概率,从而提高工作时的效率,提高伸缩的精确度。
9、可选的,所述滑轨设置有两个,两个所述滑轨平行设置在所述输送架的传输方向的两侧。
10、通过采用上述技术方案,两个滑轨平衡了两个输送架的滑移时的平衡性,从而使得输送架在滑移时手里均衡,从而提高使用寿命和滑移时的流畅程度。
11、可选的,所述滑块与所述滑轨配合的开口方向垂直于所述输送架的滑移面。
12、通过采用上述技术方案,使得滑块的开口两端均能作用在滑轨上,使得滑块的开口两端受力均衡,相较于滑轨配合的开口方向平行于输送架的滑移面这种方式,提高了使用寿命。
13、可选的,安装有所述滑轨的所述输送架设置有滚轮,相邻的所述输送架设置有与所述滚轮接触配合的承托部。
14、通过采用上述技术方案,滚轮的设置起到减轻滑块和滑轨之间相对作用力,起到支撑的作用,进一步降低滑块和滑轨之间的摩擦力,提高滑移的流畅度。
15、可选的,所述输送架沿滑移方向分别设有多组支撑轮和通孔,所述通孔开设在所述输送架,所述支撑轮穿过所述通孔压在相邻的所述输送架。
16、通过采用上述技术方案,由于输送架自重较大,光通过滑块和滑轨的支撑,摩擦力会较大,在电机带动滑移时,会有较大阻力。通过支撑轮的设置,对输送架进行支撑,大大降低了相邻输送架在滑移过程中的摩擦力,提高了滑移的顺畅程度,减少卡顿的概率。
17、可选的,所述支撑轮和所述通孔在所述输送架的宽度方向间隔设置有两列。
18、通过采用上述技术方案,设置多列支撑轮,起到对输送架重力支撑的平衡性,且使得支撑轮的使用寿命大大增加,降低维护更换的成本和周期。
19、综上所述,相邻输送架之间通过电机齿轮齿条的方式进行驱动伸缩,使得伸缩的精度较高,且滑块滑轨的配合、滚轮、支撑轮的设置,大大减小了相邻输送架之间的摩擦力,降低了滑移时卡顿的概率,提高了滑移的流畅度,从而能够满足不同精度要求的环境需求,提高了适用性。
技术特征:
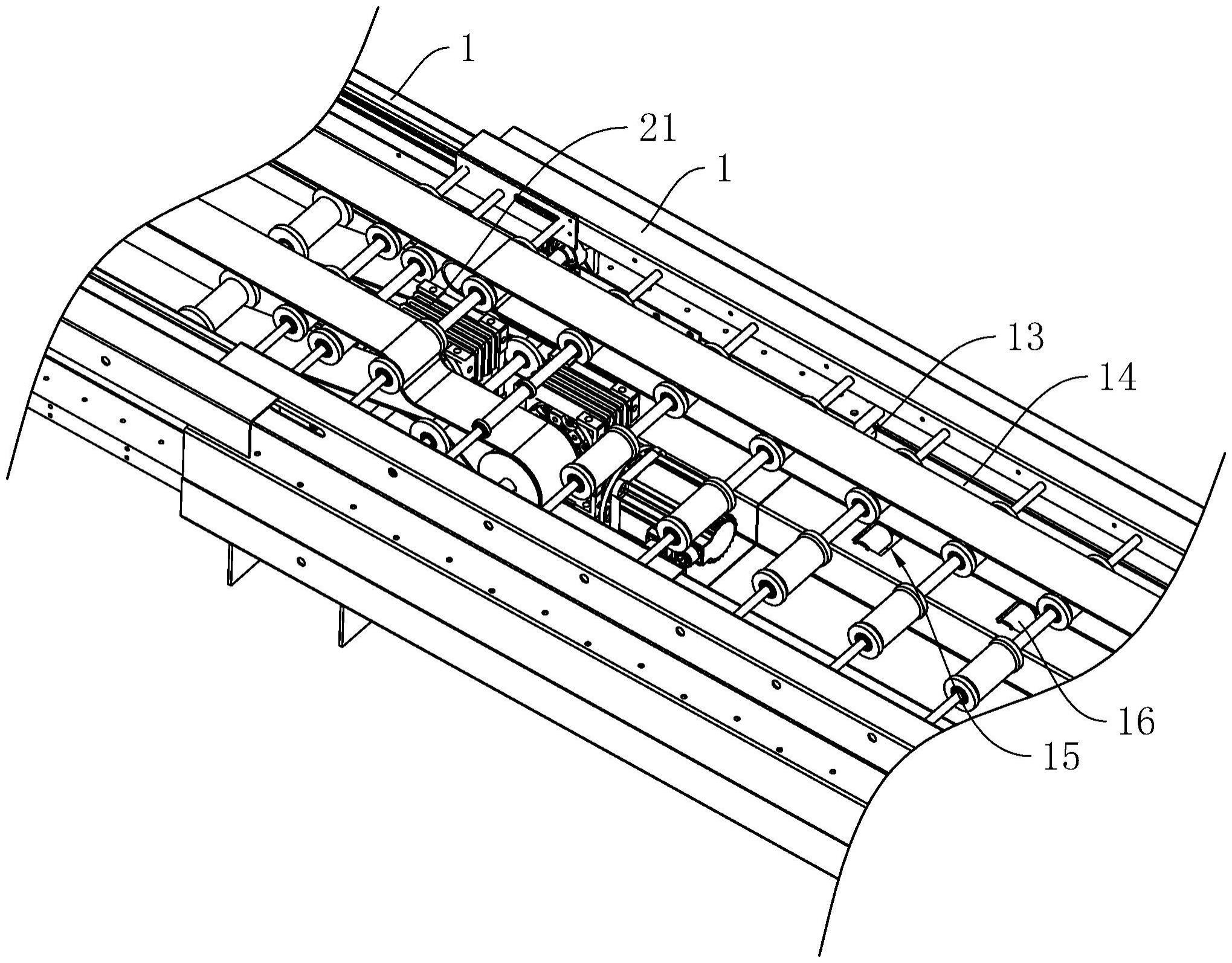
1.一种伸缩臂结构,包括至少两节相互滑移配合的输送架(1),其特征在于:相邻两节所述输送架(1)分别设置有电机(21)和齿条(23),所述齿条(23)的长度方向平行于所述输送架(1)的滑移方向,所述电机(21)的输出轴安装有与所述齿条(23)啮合的齿轮(22)。
2.根据权利要求1所述的伸缩臂结构,其特征在于:在设有所述齿条(23)的所述输送架(1)设置有两个所述齿条(23),两个所述齿条(23)分别设置在所述输送架(1)长度方向的两侧,所述齿轮(22)也设置有两个,两个所述齿轮(22)安装在所述电机(21)的输出轴,且两个所述齿条(23)与两个所述齿轮(22)一一对应啮合。
3.根据权利要求1所述的伸缩臂结构,其特征在于:相邻所述输送架(1)分别设置有滑轨(12)和多个滑块(11),所述滑轨(12)的长度方向平行于所述输送架(1)的滑移方向,所述滑块(11)间隔安装且所述滑轨(12)滑移配合。
4.根据权利要求3所述的伸缩臂结构,其特征在于:所述滑轨(12)设置有两个,两个所述滑轨(12)平行设置在所述输送架(1)的传输方向的两侧。
5.根据权利要求3所述的伸缩臂结构,其特征在于:所述滑块(11)与所述滑轨(12)配合的开口方向垂直于所述输送架(1)的滑移面。
6.根据权利要求3所述的伸缩臂结构,其特征在于:安装有所述滑轨(12)的所述输送架(1)设置有滚轮(13),相邻的所述输送架(1)设置有与所述滚轮(13)接触配合的承托部(14)。
7.根据权利要求1所述的伸缩臂结构,其特征在于:所述输送架(1)沿滑移方向分别设有多组支撑轮(16)和通孔(15),所述通孔(15)开设在所述输送架(1),所述支撑轮(16)穿过所述通孔(15)压在相邻的所述输送架(1)。
8.根据权利要求7所述的伸缩臂结构,其特征在于:所述支撑轮(16)和所述通孔(15)在所述输送架(1)的宽度方向间隔设置有两列。
技术总结
本申请公开了一种伸缩臂结构,涉及机械伸缩结构的技术领域,包括至少两节相互滑移配合的输送架,相邻两节所述输送架分别设置有电机和齿条,所述齿条的长度方向平行于所述输送架的滑移方向,所述电机的输出轴安装有与所述齿条啮合的齿轮。本申请具有伸缩精度高、滑移流畅的效果。
技术研发人员:陈远来,邵艳,陈锦阳,何飞
受保护的技术使用者:浙江谨圣科技有限公司
技术研发日:20230221
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!