一种电池模组转运装置的制作方法
本技术涉及电池生产设备,特别指一种电池模组转运装置。
背景技术:
1、随着新能源的快速发展,电池制造业也随之高速发展,对电池模组的需求与日俱增。电池模组在生产过程中需要不断的在不同工序之间转运,例如转运到不同的测试工位进行相关的测试。
2、传统用于转运电池模组的转运小车存在如下缺点:1、需要人工来移动转运小车,耗费人工;2、采用定位块对电池模组进行硬限位,兼容性差;3、为适配后续电池模组上线动作采用间隙配合,使得电池模组在转运过程中会产生一定窜动,不仅导致定位精度下降,还可能会对电池模组造成损伤。
3、因此,如何提供一种电池模组转运装置,实现提升电池模组转运的便捷性、兼容性以及稳定性,成为一个亟待解决的技术问题。
技术实现思路
1、本实用新型要解决的技术问题,在于提供一种电池模组转运装置,实现提升电池模组转运的便捷性、兼容性以及稳定性。
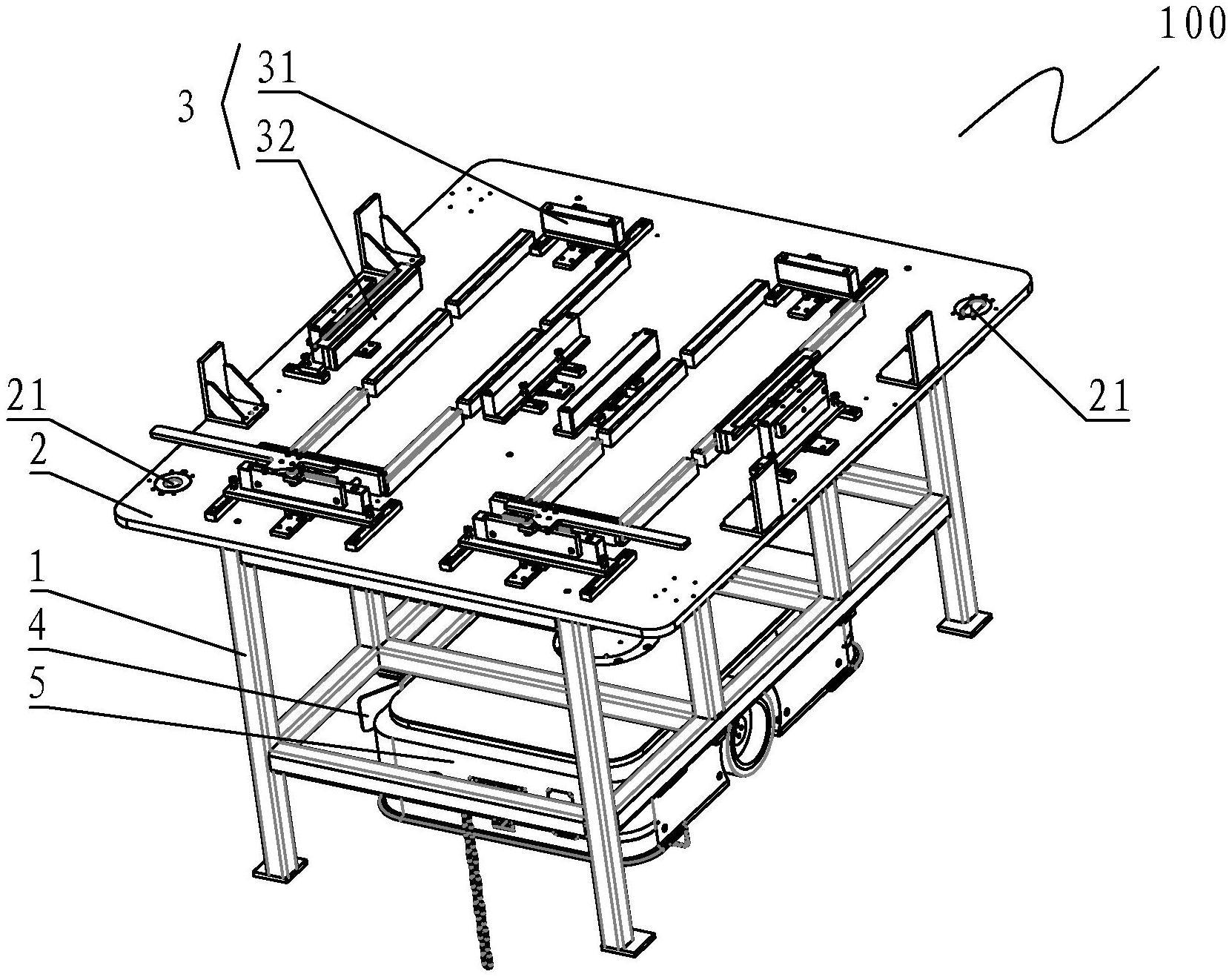
2、本实用新型是这样实现的:一种电池模组转运装置,包括:
3、一个转运车架;
4、一块转运板,设于所述转运车架的顶端,设有两个定位销孔;
5、两个定位夹紧组件,设于所述转运板的顶端;
6、一个机器人连接件,设于所述转运车架的底端;
7、一个agv机器人,与所述机器人连接件连接;
8、所述定位夹紧组件包括:
9、两个定位机构,设于所述转运板的顶端,分别位于左侧和后侧;
10、两个弹簧压紧机构,设于所述转运板的顶端,分别位于前侧和右侧,与所述定位机构围合成一个矩形。
11、进一步地,两个所述定位销孔,其中一个为圆形,另一个为腰圆形。
12、进一步地,所述定位机构包括:
13、一条滑轨,设于所述转运板的顶端;
14、两块定位板,平行设于所述转运板的顶端,位于所述滑轨的两侧,并排设有若干个定位孔;
15、一块定位块,与所述滑轨滑动连接;
16、两个锁附件,至上而下穿过所述定位块分别嵌入一定位板的定位孔。
17、本实用新型的优点在于:
18、通过设置agv机器人利用机器人连接件与转运车架连接,进而利用agv机器人自动移动转运装置,以对电池模组进行自动转运,无需人工来移动;通过设置定位机构和弹簧压紧机构来对电池模组进行定位和压紧,可灵活匹配不同尺寸的电池模组;通过设置弹簧压紧机构对电池模组进行压紧,可避免电池模组在转运过程中的窜动,最终极大的提升了电池模组转运的便捷性、兼容性以及稳定性。
技术特征:
1.一种电池模组转运装置,其特征在于:包括:
2.如权利要求1所述的一种电池模组转运装置,其特征在于:两个所述定位销孔,其中一个为圆形,另一个为腰圆形。
3.如权利要求1所述的一种电池模组转运装置,其特征在于:所述定位机构包括:
技术总结
本技术提供了电池生产设备技术领域的一种电池模组转运装置,包括:一个转运车架;一块转运板,设于所述转运车架的顶端,设有两个定位销孔;两个定位夹紧组件,设于所述转运板的顶端;一个机器人连接件,设于所述转运车架的底端;一个AGV机器人,与所述机器人连接件连接;所述定位夹紧组件包括:两个定位机构,设于所述转运板的顶端,分别位于左侧和后侧;两个弹簧压紧机构,设于所述转运板的顶端,分别位于前侧和右侧,与所述定位机构围合成一个矩形。本技术的优点在于:极大的提升了电池模组转运的便捷性、兼容性以及稳定性。
技术研发人员:刘作斌,黄振诚,刘永
受保护的技术使用者:福建星云电子股份有限公司
技术研发日:20230227
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!