机器人码垛系统的制作方法
本技术涉及机器人码垛,更具体地说是机器人码垛系统。
背景技术:
1、码垛机是输送机输送来的料袋、纸箱或是其它包装材料按照客户工艺要求的工作方式自动堆叠成垛,并将成垛的物料进行输送的设备。
2、公开号为cn214878363u的中国专利文件中,公开了工业机械技术领域的一种机器人码垛系统,包括底板,所述底板上端面左右两侧分别活动连接有第一活动杆和第二活动杆,所述第一活动杆和第二活动杆上端活动连接有安装板,所述底板和安装板相对面右侧设有滑动装置,所述安装板上端面中心处设有壳体,所述壳体内腔中心处设有驱动电机,所述驱动电机左右端面均固定连接有固定杆,所述固定杆末端分别固定连接壳体内腔左右端面,所述驱动电机的电机轴上端面固定连接有旋转轴,所述旋转轴上端贯穿壳体上端面至壳体上部,所述旋转轴上端面设有连接板,所述连接板上端面设有固定柱,该装置结构简单,操作方便,有效提高码垛效率,方便使用。
3、上述技术方案借助抽风机和吸盘的配合增强结构稳定性,而地面会存在颗粒状杂物,会影响吸盘与地面之间的贴合紧密性,进而会影响吸盘贴合地面时的稳定性。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型提供机器人码垛系统,通过套筒上开口与活动板上通孔的错位,使得吸盘位于一个封闭环境,由此可以避免外界碰撞等因素对吸盘造成损坏,保障后续吸盘的使用效果和使用寿命,同时通过第一电机的运转带动活动板转动,借此可以使活动板上的刷板对地面进行清洁,避免地面颗粒等杂质影响后续吸盘与地面的贴合效果,由此可以提高吸盘后续与地面的贴合紧密性和贴合稳定性,以解决上述背景技术中出现的问题。
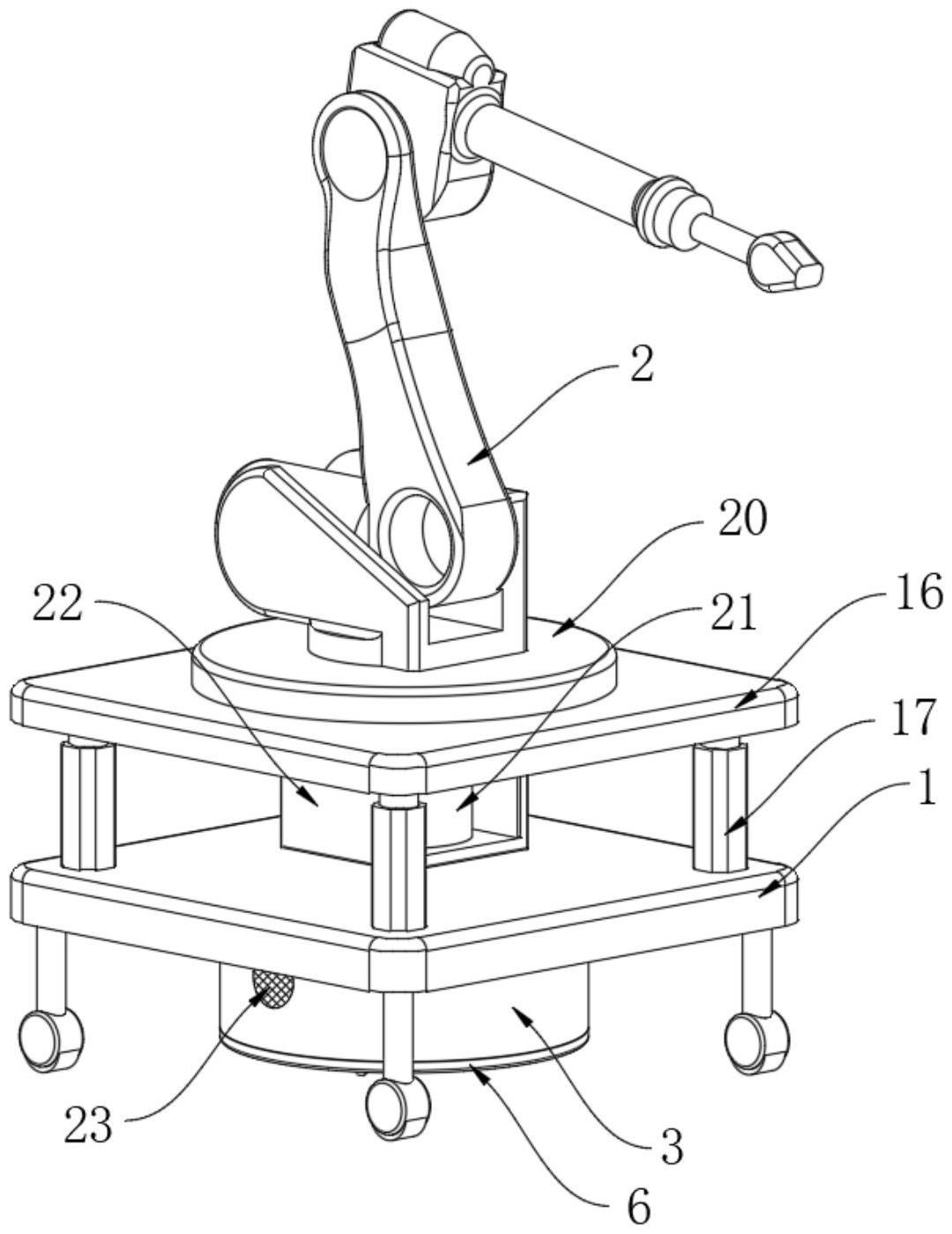
2、为实现上述目的,本实用新型提供如下技术方案:机器人码垛系统,包括支撑台,所述支撑台顶部设有机器人本体,所述支撑台与机器人之间设有用于高度调节的纵向调节组件;
3、所述纵向调节组件外部设有用于转向调节的方位调节组件;
4、所述支撑台底端设有用于避免晃动的定位组件;
5、所述定位组件外部设有用于清洁的除尘组件;
6、所述除尘组件包括套筒,所述套筒设于支撑台底端,所述套筒顶端与支撑台底部固定连接,所述套筒底端贯穿开设有多个开口,多个开口之间均匀间隔分布,所述套筒内腔底部设有第一电机,所述第一电机输出端贯穿套筒并延伸至套筒底部;
7、所述套筒底端设有活动板,所述活动板顶端与第一电机输出端固定连接,所述活动板内部贯穿开设有多个通孔,相邻两个通孔之间均设有刷板,所述刷板顶端与活动板底部固定连接。
8、在一个优选地实施方式中,所述纵向调节组件包括固定板,所述固定板设于支撑台顶部,所述固定板底端设有多个第二电动推杆,所述第二电动推杆顶端和底端分别与固定板和支撑台相靠近的一侧固定连接,通过第二电动推杆的伸展及收缩,可以调节固定板的高度,由此可以依据需要对机器人本体进行高度调节。
9、在一个优选地实施方式中,所述方位调节组件包括安装孔,所述安装孔开设于固定板内部,所述安装孔内部设有安装柱,所述安装柱外部通过轴承与安装孔内壁活动连接,所述安装柱顶部固定设有安装板,所述机器人本体设在安装板顶部,通过安装柱与固定板的活动连接,使得安装板可以以安装柱为中心进行转动,由此可以对机器人本体的方位进行调节。
10、在一个优选地实施方式中,所述安装柱底端设有第二电机,所述第二电机输出端与安装柱底端固定连接,所述第二电机底端固定设有安装支架,所述安装支架两端顶部均与固定板底部固定连接,通过第二电机的设置,可以带动安装柱转动,由此可以提高对机器人本体进行方位调节时的便捷性。
11、在一个优选地实施方式中,所述定位组件包括环管,所述环管底端固定连通有多个连接管,多个连接管分别与多个开口的位置上下相对应,所述连接管底端设有吸盘,所述吸盘底端延伸至开口内部,所述环管顶端设有抽风机,所述抽风机固定设于支撑台底端,所述抽风机出风口固定连通有输送管,所述输送管两端底部均固定连通有波纹管,所述波纹管底端与环管顶部固定连通,借助第一电动推杆的伸展带动环管上的吸盘移出通孔和开口并与地面接触,最后利用抽风机的抽吸,使吸盘与地面紧密贴合,借此保障整体结构的稳定性,避免出现晃动偏移的情况。
12、在一个优选地实施方式中,所述环管顶部固定设有多个第一电动推杆,多个第一电动推杆之间均匀间隔分布,所述第一电动推杆顶端与支撑台底端固定连接,通过第一电动推杆的伸展和收缩,可以带动吸盘上下运动,由此可以使吸盘与地面贴合或将吸盘收纳至套筒内部。
13、在一个优选地实施方式中,所述套筒两侧均固定嵌设有滤网,通过滤网的设置,可以保障空气的流通,也能避免外界的杂质进入到套筒内部。
14、本实用新型的技术效果和优点:
15、通过套筒上开口与活动板上通孔的错位,使得吸盘位于一个封闭环境,由此可以避免外界碰撞等因素对吸盘造成损坏,保障后续吸盘的使用效果和使用寿命,同时通过第一电机的运转带动活动板转动,借此可以使活动板上的刷板对地面进行清洁,避免地面颗粒等杂质影响后续吸盘与地面的贴合效果,由此可以提高吸盘后续与地面的贴合紧密性和贴合稳定性。
技术特征:
1.机器人码垛系统,包括支撑台(1),其特征在于:所述支撑台(1)顶部设有机器人本体(2),所述支撑台(1)与机器人之间设有用于高度调节的纵向调节组件;
2.根据权利要求1所述的机器人码垛系统,其特征在于:所述定位组件包括环管(9),所述环管(9)底端固定连通有多个连接管(10),多个连接管(10)分别与多个开口(4)的位置上下相对应,所述连接管(10)底端设有吸盘(11),所述吸盘(11)底端延伸至开口(4)内部,所述环管(9)顶端设有抽风机(12),所述抽风机(12)固定设于支撑台(1)底端,所述抽风机(12)出风口固定连通有输送管(13),所述输送管(13)两端底部均固定连通有波纹管(14),所述波纹管(14)底端与环管(9)顶部固定连通。
3.根据权利要求2所述的机器人码垛系统,其特征在于:所述环管(9)顶部固定设有多个第一电动推杆(15),多个第一电动推杆(15)之间均匀间隔分布,所述第一电动推杆(15)顶端与支撑台(1)底端固定连接。
4.根据权利要求1所述的机器人码垛系统,其特征在于:所述纵向调节组件包括固定板(16),所述固定板(16)设于支撑台(1)顶部,所述固定板(16)底端设有多个第二电动推杆(17),所述第二电动推杆(17)顶端和底端分别与固定板(16)和支撑台(1)相靠近的一侧固定连接。
5.根据权利要求4所述的机器人码垛系统,其特征在于:所述方位调节组件包括安装孔(18),所述安装孔(18)开设于固定板(16)内部,所述安装孔(18)内部设有安装柱(19),所述安装柱(19)外部通过轴承与安装孔(18)内壁活动连接,所述安装柱(19)顶部固定设有安装板(20),所述机器人本体(2)设在安装板(20)顶部。
6.根据权利要求5所述的机器人码垛系统,其特征在于:所述安装柱(19)底端设有第二电机(21),所述第二电机(21)输出端与安装柱(19)底端固定连接,所述第二电机(21)底端固定设有安装支架(22),所述安装支架(22)两端顶部均与固定板(16)底部固定连接。
7.根据权利要求1所述的机器人码垛系统,其特征在于:所述套筒(3)两侧均固定嵌设有滤网(23)。
技术总结
本技术公开了机器人码垛系统,具体涉及机器人码垛技术领域,包括支撑台,所述支撑台顶部设有机器人本体,所述支撑台与机器人之间设有用于高度调节的纵向调节组件;所述纵向调节组件外部设有用于转向调节的方位调节组件;所述支撑台底端设有用于避免晃动的定位组件。本技术通过套筒上开口与活动板上通孔的错位,使得吸盘位于一个封闭环境,由此可以避免外界碰撞等因素对吸盘造成损坏,保障后续吸盘的使用效果和使用寿命,同时通过第一电机的运转带动活动板转动,借此可以使活动板上的刷板对地面进行清洁,避免地面颗粒等杂质影响后续吸盘与地面的贴合效果,由此可以提高吸盘后续与地面的贴合紧密性和贴合稳定性。
技术研发人员:厉国,张志
受保护的技术使用者:上海尧竞智能设备有限公司
技术研发日:20230316
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!