制造系统的制作方法
本技术实施例是有关于一种制造系统及一种叉取机器人。
背景技术:
1、基本上,集成电路的制造通常是通过对工件(例如,半导体或硅晶片)执行大量光刻步骤来完成。这些光刻步骤通常会导致结合衬底(例如,半导体或硅)的高度复杂的布置形成大量导电结构。这些光刻步骤还导致介电层、金属内连线、通孔、插塞及其他集成电路结构和组件的形成。
2、基本上,在电子装置或半导体装置的制造中,机器人经常被用于在各种加工设备(例如,加工工具)之间运送工件。当未被加工(processed)时,这些工件可以储存在储存系统中,例如,储料器,所述储存系统包含一个封闭的环境,在所述环境中维持、监控和控制某些环境特性。例如,这些环境特性可以包括湿度、空气特性(例如,碎片、污染物、颗粒、污染物等)或可以在储存系统内维持、监控或控制的其他类似环境特性。通过维持、控制和监控在封闭的环境内的这些环境特性,可以维持储存在储存系统内的工件的特性避免工件变质。
技术实现思路
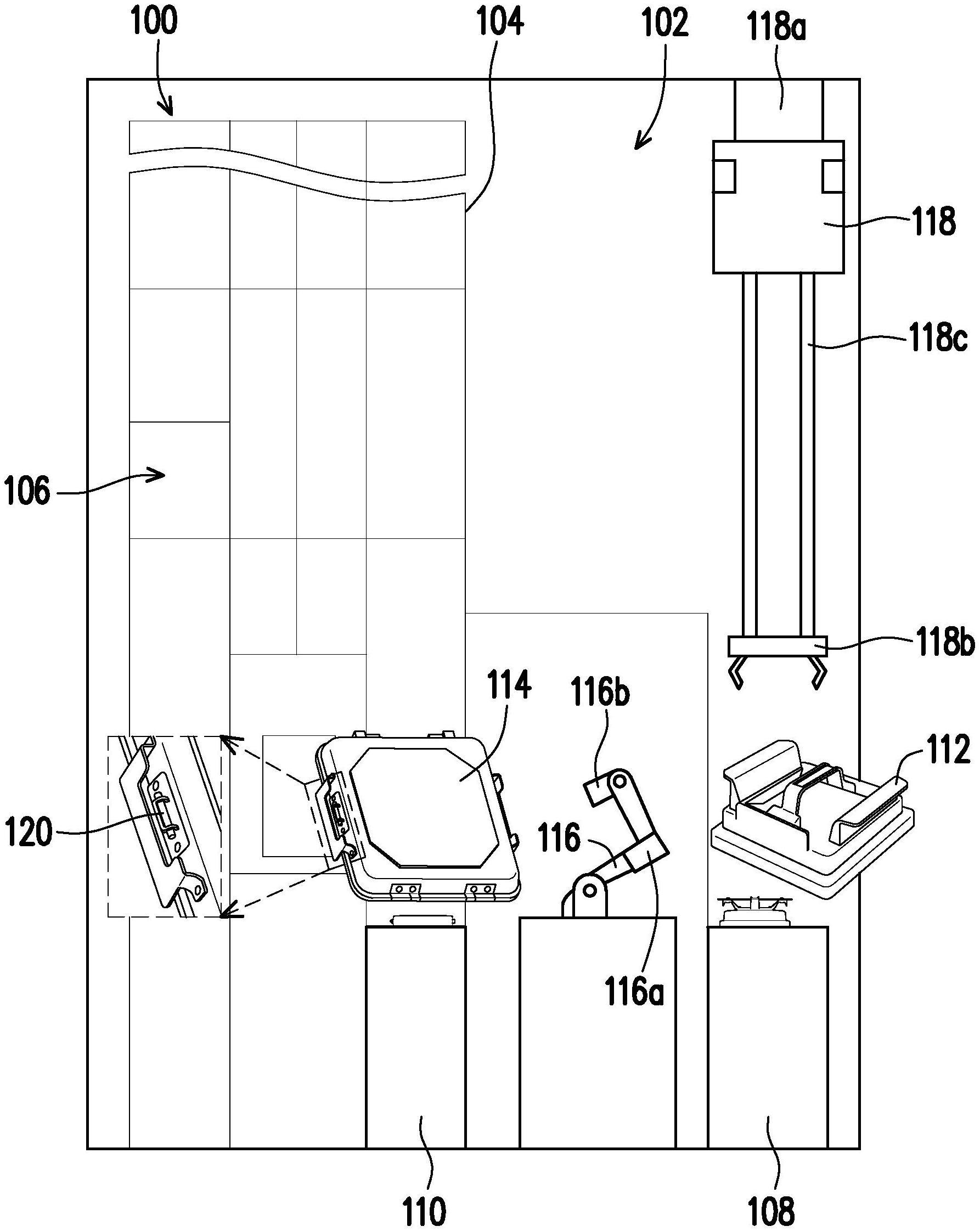
1、本实用新型实施例提供一种制造系统,包括:储料器,包括:壳体;储存隔室,在所述壳体内并由所述壳体所界定;多个隔板,在所述储存隔室内;多个储存载体在所述多个隔板上,每个储存载体在所述多个隔板中的对应一个上,且所述每个储存载体包括:第一表面,接触所述多个隔板中的所述对应一个;第二表面,与所述第一表面相对且背离所述多个隔板中的所述对应一个;及第一尺寸,从所述第一表面延伸到所述第二表面;及多个间隙,每个间隙具有从所述多个储存载体的其中一个的所述第二表面中的对应一个延伸到所述多个隔板中的相邻一个的第二尺寸,所述第二尺寸小于所述第一尺寸。
2、本实用新型实施例提供一种叉取机器人,包括:加号形状支撑结构,包括:第一延伸部,具有第一端部;第二延伸部,具有第二端部,所述第二延伸部横向于所述第一延伸部;第三延伸部,具有第三端部,所述第三延伸部横向于所述第一延伸部,所述第三端部与所述第一端部相对;及第四延伸部,具有第四端部,所述第四延伸部横向于所述第二延伸部和所述第三延伸部;第一分界壁墙结构,在所述第一端部处;第二分界壁墙结构,在所述第二端部处;第三分界壁墙结构,在所述第三端部处;第四分界壁墙结构,在所述第四延伸部上;及挂勾,在所述第一端部处,所述挂勾与所述第一分界壁墙结构相对。
3、为让本实用新型实施例的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
技术特征:
1.一种制造系统,其特征在于,包括:
2.根据权利要求1所述的制造系统,其特征在于,还包括与所述储料器进行机械协作的生产载体运送系统,所述生产载体运送系统包括被配置为与生产载体进行机械协作的末端执行器。
3.根据权利要求1所述的制造系统,其特征在于,所述储料器还包括:
4.根据权利要求1所述的制造系统,其特征在于,所述储料器还包括:
5.根据权利要求1所述的制造系统,其特征在于,所述多个隔板中的每一个包括一个或多个滑轨,且所述多个隔板中的所述每一个能够在第一位置和第二位置之间移动。
6.根据权利要求1所述的制造系统,其特征在于,所述多个储存载体每个包括射频识别结构,所述射频识别结构被配置为在操作中识别所述多个储存载体中的每一个。
7.根据权利要求1所述的制造系统,其特征在于,所述储存隔室包括:
8.根据权利要求1所述的制造系统,其特征在于,所述储料器还包括:
9.根据权利要求8所述的制造系统,其特征在于,所述叉取机器人还包括在所述加号形状支撑结构的所述第四端部处的夹具。
10.根据权利要求8所述的制造系统,其特征在于,所述第四延伸部的所述第四端部连接到铰接结构,所述铰接结构被配置为在操作中移动所述加号形状支撑结构。
技术总结
本技术实施例提供一种制造系统及叉取机器人。本技术实施例是关于一种使用一个或多个储存载体来优选在储料器内的储存隔室的使用。储料器包括一个或多个储存塔,每个储存塔包括一个或多个隔板,通过叉取结构的挂勾向外拉,可以将一个或多个隔板从闭合位置移动到打开位置。叉取结构被配置为从隔板上提起对应储存载体以运送到储存载体装载接口,以将一个或多个工件或工具件定位在储存载体内,然后将其运送回对应隔板以进行储存。叉取结构和隔板拉出的使用允许更多数量的储存载体储存在储料器的储存隔室内。
技术研发人员:范容瑄,张庆荣,董启峰,沈香吟
受保护的技术使用者:台湾积体电路制造股份有限公司
技术研发日:20230324
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!