阀口袋全自动包装系统的制作方法
本技术涉及阀口袋包装设备,尤其涉及阀口袋全自动包装系统。
背景技术:
1、阀口袋,俗称糊底袋,为国际流行包装袋,从顶部或底部阀口进料,采用专门灌装设备,灌装物料后装成方体,堆包整齐美观,属于环保袋。目前国内粉料类的包装分为敞开袋和阀口袋包装系统,其中阀口袋大多为半自动包装系统,上料套袋动作均由人工完成。
2、现有技术中至少存在如下问题:一是现场工作环境差,噪音、粉尘较多,对人体的健康影响较大,二是人工参与程度高,导致劳动强度高,人工成本较高,且生产效率较低。
技术实现思路
1、本实用新型针对现有技术的不足,研制一种阀口袋全自动包装系统,本实用新型能够代替高强度的人工参与部分,快速套袋,有效降低对人体健康的危害,降低了劳动强度,有效提高了生产效率。
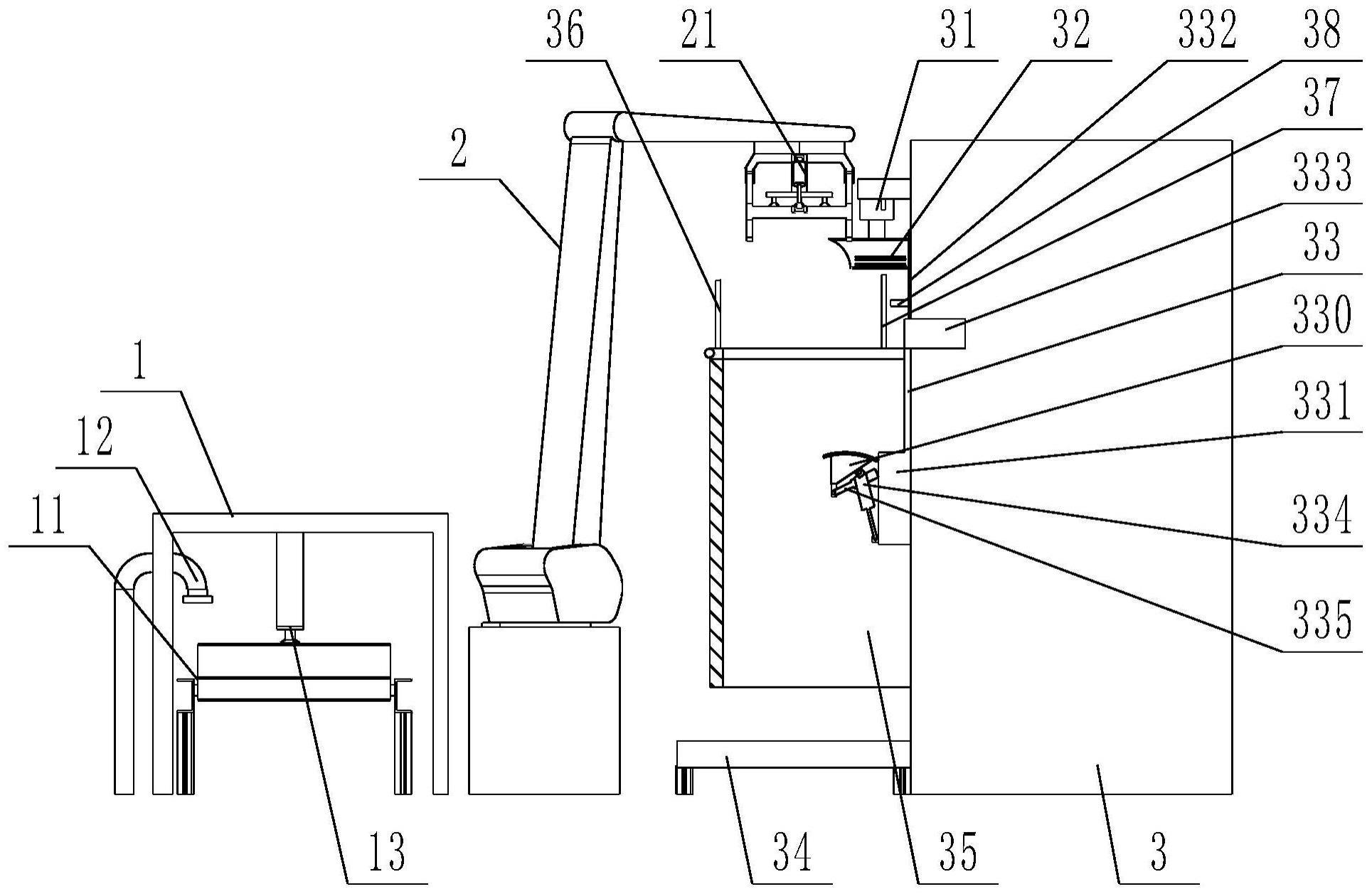
2、本实用新型解决技术问题的技术方案为:阀口袋全自动包装系统,包括自动送袋机、多轴机器人和出料机,自动送袋机包括第一传送装置、第一检测装置和压袋装置,第一检测装置、压袋装置分别通过支架设在第一传送装置一端的上方,第一传送装置的一侧设有多轴机器人,多轴机器人上设有机械手,多轴机器人的一侧设有出料机,出料机的侧壁上设有夹袋装置、出料管和旋转称,旋转称的下方设有第二传送装置。
3、作为优化,机械手包括连接架,连接架底部设有安装架,安装架的底部设有第一伸缩装置,端头的两侧均铰接设有机械爪,中部的两侧对称铰接设有第二伸缩装置,第一伸缩装置的输出端底部设有吸附装置,同一侧的机械爪通过菱板互相连接,第二伸缩装置的输出端与菱板铰接。通过设置连接架能将机械手安装到多轴机器人上;通过设置安装架,能够安装第一伸缩装置、机械爪、第二伸缩装置以及吸附装置;通过设置第一伸缩装置,能够升降吸附装置,配合配合压袋装置打开袋口;通过设置第二伸缩装置,可以通过菱板带动机械爪开合,夹紧或松开阀口袋;通过设置菱板,可以使阀口袋的袋口保持打开状态,方便将袋口套至出料管上。
4、作为优化,菱板的内侧设有凹槽。通过设置菱板的内侧设有凹槽,能够更好的固定阀口袋的形状。
5、作为优化,吸附装置包括吸盘架和吸盘,吸盘架的底部至少设有一组吸盘。通过设置吸盘架,能够搭载吸盘;通过设置至少一组吸盘,能够提高吸附装置对阀口袋的吸取能力。
6、作为优化,旋转称包括旋转称板、下支撑件、上支撑件和称重传感器,旋转称板通过摆动装置设在下支撑件上,下支撑件设在出料机的侧壁上,顶部与称重传感器的底部连接,称重传感器的顶部与上支撑件连接。通过设置旋转称板,能够托起阀口袋的底部;通过设置下支撑件,能够通过摆动装置安装旋转称板,并将所受到的重力传递给称重传感器;通过设置上支撑件,能够支撑称重传感器,使称重传感器能精准称重。
7、作为优化,摆动装置包括第三伸缩装置和第四伸缩装置,第三伸缩装置的一端与旋转称板的侧壁顶部铰接,另一端与下支撑件的侧壁底部铰接,第四伸缩装置的一端与旋转称板的侧壁底部铰接,另一端与下支撑件的侧壁顶部铰接。通过设置第三伸缩装置和第四伸缩装置,交叉设在旋转称板和下支撑件之间,可以互相配合,使旋转称板远离下支撑件的一侧翻转,将装填好物料的阀口袋下料倒至第二传送装置上,下料后重新复位。
8、作为优化,出料机的侧壁上还设有料筒,旋转称设在料筒的内部,料筒设在第二传送装置的上方,底部第二传送装置之间设有间隙,料筒侧板的顶部两端分别设有第二检测装置和第三检测装置。通过设置料筒,能够形成下料通道,可以在下料时,保证装填完的阀口袋不会偏离位置,直接落到第二传送装置上,能够支撑第二检测装置和第三检测装置,检测阀口袋是否在料筒内,是否准确到位。
9、作为优化,出料管和料筒之间的出料机上设有吹气口。通过设置吹气口,能够吹出强劲的气流,将底部未落到料筒内的阀口袋吹走。
10、作为优化,第一传送装置、第二传送装置为带式输送机、板式输送机中的任意一种,第一检测装置、第二检测装置和第三检测装置均为光电传感器。
11、作为优化,压袋装置、夹袋装置、第一伸缩装置、第二伸缩装置、第三伸缩装置和第四伸缩装置为气缸、电缸、液压缸中的任意一种。
12、与现有技术相比,本实用新型具有如下有益效果:
13、通过设置自动送袋机,能够自动送袋,第一传送装置能将阀口袋传送至多轴机器人的抓取工位上,第一检测装置能够检测多轴机器人的抓取工位上是否还有阀口袋,压袋装置能够将阀口袋的袋底压紧在第一传送装置上,方便机械手抓取阀口袋后打开袋口;通过设置多轴机器人,可以通过机械手将阀口袋从自动送袋机上抓取,配合压袋装置打开袋口,然后将袋口套到出料机的出料管上装填物料;通过设置夹袋装置,可以将套好的袋口压紧在出料管上,防止在装料过程中袋口从出料管上脱落;通过设置旋转称,能够托起阀口袋的底部,并对阀口袋内的物料进行称重,到达规定重量时,可以旋转将装填好物料的阀口袋倒至第二传送装置上,由第二传送装置送至下一道工序;本实用新型能够代替高强度的人工参与部分,快速套袋,有效降低对人体健康的危害,降低了劳动强度,有效提高了生产效率。
技术特征:
1.阀口袋全自动包装系统,包括自动送袋机(1)、多轴机器人(2)和出料机(3),其特征是:自动送袋机(1)包括第一传送装置(11)、第一检测装置(12)和压袋装置(13),第一检测装置(12)、压袋装置(13)分别通过支架设在第一传送装置(11)一端的上方,第一传送装置(11)的一侧设有多轴机器人(2),多轴机器人(2)上设有机械手(21),多轴机器人(2)的一侧设有出料机(3),出料机(3)的侧壁上设有夹袋装置(31)、出料管(32)和旋转称(33),旋转称(33)的下方设有第二传送装置(34)。
2.根据权利要求1所述的阀口袋全自动包装系统,其特征是:机械手(21)包括连接架(210),连接架(210)底部设有安装架(211),安装架(211)的底部设有第一伸缩装置(212),端头的两侧均铰接设有机械爪(213),中部的两侧对称铰接设有第二伸缩装置(214),第一伸缩装置(212)的输出端底部设有吸附装置,同一侧的机械爪(213)通过菱板(215)互相连接,第二伸缩装置(214)的输出端与菱板(215)铰接。
3.根据权利要求2所述的阀口袋全自动包装系统,其特征是:菱板(215)的内侧设有凹槽(216)。
4.根据权利要求2所述的阀口袋全自动包装系统,其特征是:吸附装置包括吸盘架(217)和吸盘(218),吸盘架(217)的底部至少设有一组吸盘(218)。
5.根据权利要求4所述的阀口袋全自动包装系统,其特征是:旋转称(33)包括旋转称板(330)、下支撑件(331)、上支撑件(332)和称重传感器(333),旋转称板(330)通过摆动装置设在下支撑件(331)上,下支撑件(331)设在出料机(3)的侧壁上,顶部与称重传感器(333)的底部连接,称重传感器(333)的顶部与上支撑件(332)连接。
6.根据权利要求5所述的阀口袋全自动包装系统,其特征是:摆动装置包括第三伸缩装置(334)和第四伸缩装置(335),第三伸缩装置(334)的一端与旋转称板(330)的侧壁顶部铰接,另一端与下支撑件(331)的侧壁底部铰接,第四伸缩装置(335)的一端与旋转称板(330)的侧壁底部铰接,另一端与下支撑件(331)的侧壁顶部铰接。
7.根据权利要求6所述的阀口袋全自动包装系统,其特征是:出料机(3)的侧壁上还设有料筒(35),旋转称(33)设在料筒(35)的内部,料筒(35)设在第二传送装置(34)的上方,底部第二传送装置(34)之间设有间隙,料筒(35)侧板的顶部两端分别设有第二检测装置(36)和第三检测装置(37)。
8.根据权利要求7所述的阀口袋全自动包装系统,其特征是:出料管(32)和料筒(35)之间的出料机(3)上设有吹气口(38)。
9.根据权利要求8所述的阀口袋全自动包装系统,其特征是:第一传送装置(11)、第二传送装置(34)为带式输送机、板式输送机中的任意一种,第一检测装置(12)、第二检测装置(36)和第三检测装置(37)均为光电传感器。
10.根据权利要求6-9任一项所述的阀口袋全自动包装系统,其特征是:压袋装置(13)、夹袋装置(31)、第一伸缩装置(212)、第二伸缩装置(214)、第三伸缩装置(334)和第四伸缩装置(335)为气缸、电缸、液压缸中的任意一种。
技术总结
本技术公开了一种阀口袋全自动包装系统,包括自动送袋机、多轴机器人和出料机,自动送袋机包括第一传送装置、第一检测装置和压袋装置,第一检测装置、压袋装置分别通过支架设在第一传送装置一端的上方,第一传送装置的一侧设有多轴机器人,多轴机器人上设有机械手,多轴机器人的一侧设有出料机,出料机的侧壁上设有夹袋装置、出料管和旋转称,旋转称的下方设有第二传送装置。本技术能够代替高强度的人工参与部分,快速套袋,有效降低对人体健康的危害,降低了劳动强度,有效提高了生产效率。
技术研发人员:韩浩,释栋,刘娜
受保护的技术使用者:山东宏信化工股份有限公司
技术研发日:20230323
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!